1. 判断满二叉树
所有节点的度要么为0,要么为2,且所有的叶子节点都在最后一层。
C++
#include <iostream>
using namespace std;
class TreeNode {
public:
int val;
TreeNode* left;
TreeNode* right;
//创建的时候输入参数x,会把x给val,nullptr给left和right
TreeNode(int x) : val(x), left(nullptr), right(nullptr) {};
TreeNode(int x, TreeNode* l, TreeNode* r) : val(x), left(l), right(r) {};
};
bool isfull(TreeNode* cur) {
if (cur == nullptr) return true;
if (cur->left == nullptr && cur->right != nullptr || cur->left != nullptr && cur->right == nullptr) return false;
if (cur->left != nullptr) {
isfull(cur->left);
isfull(cur->right);
}
else {
return true;
}
}
int main() {
int x = 1;
TreeNode* left = new TreeNode(1);
TreeNode* right = new TreeNode(1);
TreeNode* root = new TreeNode(1, left, nullptr);
cout << isfull(root) << endl;
}重点在于创建一个TreeNode类,并且写出构造函数,调用构造函数创建节点。
2. 给定一个数,求该数的平方根,不用内置函数
二分法求解。递归。
c++
float n;
float e = 0.001;
float findsquare(float left, float right) {
float mid = (left + right) / 2;
if (mid * mid - n >= 0 && mid * mid - n < e || mid * mid - n <= 0 && mid * mid - n >= -e) {
return mid;
}
else {
if (mid * mid > n) {
findsquare(left, mid);
}
else {
findsquare(mid, right);
}
}
}
int main() {
cin >> n;
cout<< findsquare(0, n)<<endl;
}3. GAN model 内容
图像生成模型。图像生成模型比较了解的两种是GAN和diffusion。
GAN的基本流程:生成器可以用任何输出二维图片的网络,例如DNN或者CNN。
Discriminator一般输入为图片,输出为real或者fake。
每一轮,将reference输入到discriminator里判别为real,Generator输出的输入到discriminator里判别为假。
Generator的损失函数和Discriminator的损失函数都是二元交叉熵,也就是评估真实数据的概率,Generator的目标是最大化二元交叉熵,也就是让假结果都为正,而Discriminator是最小化二元交叉熵,让假结果都为假。
4. Diffusion model 内容
首先是数学知识:
条件概率公式
基于马尔科夫假设:当前概率仅与上一刻概率有关,与其他时刻无关。可以把条件概率其他项约掉。
高斯分布的KL散度公式:
参数重整化:整理出z作为网络输入,其他两个作为网络参数,可求梯度的。
多元VAE目标函数,都是根据x推理出z,用z预测x。多元VAE的z有多个。
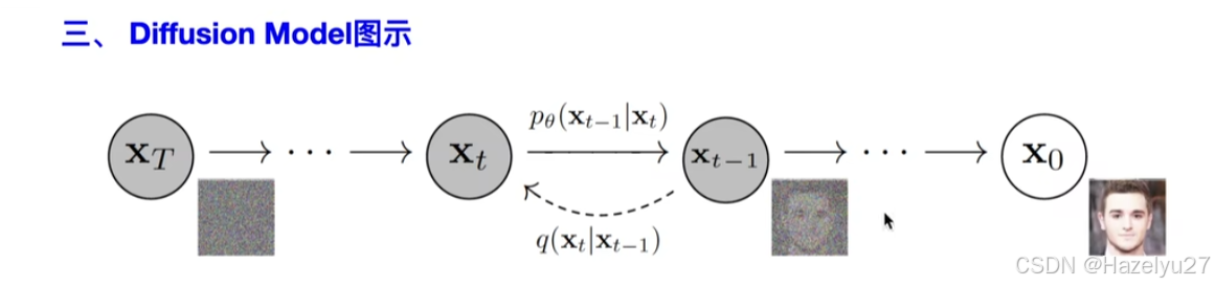
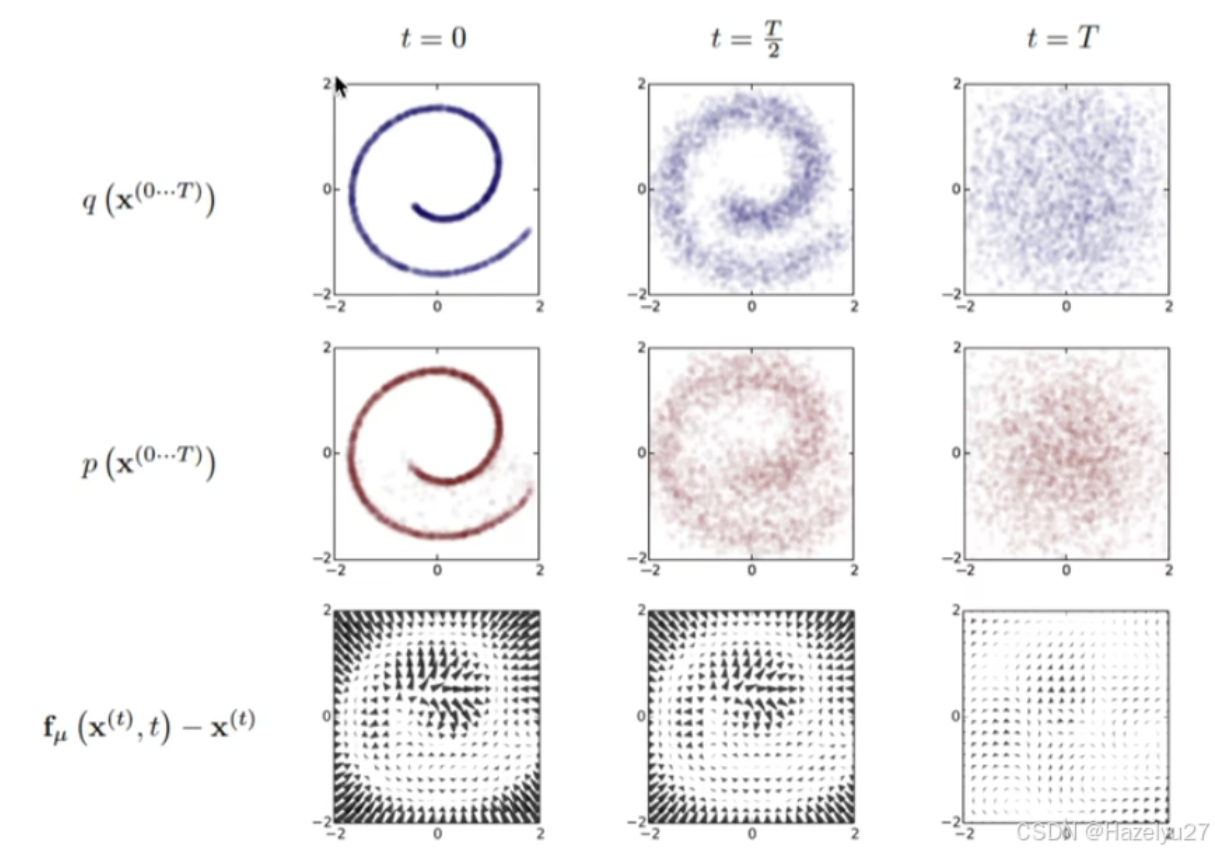
Diffusion Model 主要是两个过程,先从目标分布中扩散,得到噪声分布,是熵增的过程;
然后是从噪声分布中预测出目标分布。训练过程就是训练好这个x,这样就能在随机生成(例如高斯分布 )的噪声中获得想要的目标分布。
扩散过程是p,逆扩散过程是q。漂移量是两者之间的差。
5. 二叉树的创建,插入和删除
这里应该是搜索二叉树,左节点小于自己,右节点大于自己。
删除先不写了不会
c++
#include<iostream>
using namespace std;
class TreeNode {
public:
int val;
TreeNode* left;
TreeNode* right;
TreeNode(int x) :val(x), left(nullptr), right(nullptr) {};
TreeNode(int x, TreeNode* l, TreeNode* r) : val(x), left(l), right(r) {};
};
TreeNode* insert(TreeNode* cur, int x) {
if (cur == nullptr) {
return new TreeNode(x);
}
if (x < cur->val) {
cur->left = insert(cur->left, x);
}
else if (x > cur->val) {
cur->right = insert(cur->right, x);
}
return cur;
}
//有点复杂,先不写了
TreeNode* deleteNode(TreeNode* cur, int val) {
if (cur == nullptr) {
return cur;
}
}
int main() {
int x = 1;
TreeNode* root = new TreeNode(x);
insert(root, 2);
}6. Linux相关命令:
bash
top 查看进程信息
df -h 查看硬盘使用情况
ps aux 查看所有进程
kill -9 pid 杀死编号为pid的进程
chmod 修改权限
grep 从文件名中找到包含某个字符串的数据
wc -l 统计行数
cut 分割一行内容
echo $PATH | cut -d ':' -f 3,5:输出PATH用:分割后第3、5列数据
find -name 查找文件
vim 浏览
head -3 显示前三行内容
docker:
docker ps -a 查看容器
docker attach 恢复容器
docker exec 挂起容器
docker run 跑容器
vim :n 到第n行 dd 删除当前行 :q!直接退出 :wq保存退出 gg=G格式化
ssh 登录服务器 scp -r传文件- 快速排序
c++
#include <bits/stdc++.h>
using namespace std;
const int N = 100001;
void quicksort(int * arr, int l, int r){
if(l >= r) return;
int i = l-1, j = r+1;
int mid = (l+r) / 2;
int x = arr[mid];
while(i<j){
do i++; while(arr[i] < x) ;
do j--; while(arr[j] > x) ;
if(i<j) swap(arr[i],arr[j]);
}
quicksort(arr, l,j);
quicksort(arr, j+1, r);
}
int main(){
int n;
cin>>n;
int arr[N];
for(int i =0;i<n;i++){
cin>>arr[i];
}
quicksort(arr,0,n-1);
for(int i =0;i<n;i++){
cout<<arr[i]<<" ";
}cout<<endl;
}**总是会忘记的点:**先do后while,i和j初始化为l-1和r+1,因为进入dowhile循环后会自增or自减。
quicksort(arr, l,j); 这里不能用i代替j,因为i是一定大于x的,j是小于等于x的。要保证左边的段是小于等于x,右边的段是大于等于x。
8. xgboost和deepfm的性能。
**(1)xgboost的结构:**由多个回归决策树的模型构成。每一步都加入一个新的树。(前向分布算法,用贪心的策略)逐步优化基学习器。
优化第t棵树时,前面t-1颗树的参数是确定的。每轮的目标函数是n个样本的最小损失+正则项
正则项是前t颗树的复杂度。它由叶子结点的个数和每个节点值w的平方和决定,正则项是为了防止过拟合的。叶子节点越多,越容易过拟合。节点值大,就会导致这棵树占比比较多,也容易过拟合。
在机器学习中,一般通过梯度下降法优化参数。但是树模型是阶跃的,不连续的函数求不了梯度。所以xgboost是对每个叶节点求loss。 每个叶结点的loss可以用梯度来算,分别用了一阶导数和二阶导数也就是Hessian矩阵来找最优的分割点。
(2)xgboost如何用在推荐系统上?
将用户的上下文信息作为特征输入到xgboost中,预测用户的点击概率。所以xgboost是做回归的,放入到里面后
因为是回归任务,所以每轮迭代是选择叶节点的分裂点,然后根据分裂点得到一个值,这个值就是点击概率。多个数就是加权求平均。树的节点个数这些都是超参数。
(3)xgboost如何并行的?
并行时,在最优分裂点时用并行运算加快效率。它对特征进行分块,并行计算每个特征的增益,通过增益找到最佳分割点。再同步结果,选择最大的特征进行分割。
xgboost相对于梯度提升树(GBDT)有啥提升?
引入了二阶导数(Hessian),这在优化过程中比传统GBDT(只使用一阶导数信息)更为准确。
(4)Deepfm算法:
deep factorization machines 因子分解机。它对低阶特征做特征交互,另外一个DNN神经网络,做高阶特征交互。一般输出是两者的加权和。
因子分解机(FM)是什么?
FM是SVM的拓展,更适合用于处理稀疏特征。主要考虑到多维特征之间的交叉关系(就像SVM的核函数,用内积,但是却是用因子分解参数化的方式,而SVM中用的是稠密参数化的方式,这使得FM相比SVM的参数少了很多,更加容易计算)。其中参数的训练使用的矩阵分解的方法。
例如对于电影评分中的数据,用onehot向量建模,一个特征是非常稀疏的,非常长。因子分解机就是一种改进的二阶多项式模型,考虑到两个向量之间的相似性,例如喜欢这个类型电影的对另一个类型电影的喜欢。(推荐系统之FM(因子分解机)模型原理以及代码实践 - 简书)
本质上是用deepfm给召回阶段的候选集合排序。所以做的仅仅只是排序,不是召回。Loss用的是adam。
(5)为什么在大规模数据集上使用deepfm?
在处理用户行为数据和隐式反馈数据时,DeepFM通过其深度部分能够捕捉到复杂的非线性关系,表现较好。在大规模推荐系统中,如广告推荐、商品推荐等,DeepFM具有优势。
适合大规模数据和自动特征学习的场景,尤其在处理高维稀疏特征时表现出色。但需要大量数据和计算资源才能充分发挥其优势。
9. 判断链表里是否有环
可以用哈希法或者快慢指针法。快慢指针要注意:判断fast的next。不然会出界,并且初始化两个指针不能相同,不然当只有一个数据时返回就不对了。
c++
bool hasCycle(ListNode *head) {
if (head == nullptr) return false;
ListNode* slow = head;
ListNode* fast = head->next;
while(slow != fast){
if(fast == nullptr || fast->next == nullptr) return false;
slow = slow->next;
fast = fast->next->next;
}
return true;
}哈希表法:注意插入是insert
c++
bool hasCycle(ListNode *head) {
unordered_set<ListNode*> sets;
ListNode * cur = head;
while(cur!=nullptr){
if(sets.count(cur)) return true;
sets.insert(cur);
cur = cur->next;
}
return false;
}10. HDFS相关基础知识
对hadoop了解的不多,主要是使用了一些hadoop的命令进行数据读取。
HDFS是hadoop distribution file system。HDFS的文件分布在服务器集群上,提供副本和容错率保证。
适用于存储特别大的文件,采用流式数据进行访问。但不适合毫秒级别的访问,是有点延时的。
我是使用了一些命令行的命令,例如:
bash
hadoop fs -copyFromLocal // copy file
hadoop fs mkdir
hadoop fs -ls