RDK X5首发上手体验!真的太帅啦!!!
本Blog同步发表于:
·地瓜机器人开发者论坛:https://developer.d-robotics.cc/forumDetail/251934743552436286
· CSDN:
一年多以前无意中了解到了RDK X3,之后我便迅速的被地平线机器人开发者论坛(现在改名为了地瓜机器人开发者论坛)优秀的生态所吸引,精美的官网界面,详实的开发资料,丰富的开发案例以及机器人开发交流群里超哥等人快速的技术支持让我迅速成为了RDK的忠实粉丝,RDK X3也陪我经历两次竞赛见证了我从小白到如今的蜕变,听闻要出X5的就非常激动想要早日拿到X5上手体验,终于也是在今天拿到了RDK X5!!!哈哈哈哈哈哈!
RDK X5的售价真的非常的美丽,首发这段时间还可以享受100的优惠减免,4GB的价格只要449,8GB也只要599,这个价格这个配置这个生态对比其他友商只能说Win~!
这里附上购买链接及地瓜机器人官网链接:

接着我们进入今天的评测正题!!!
拿到RDK X5我是真的惊叹与RDK的艺术设计,不管是X3还是X5,这个包装盒设计的真的很有艺术气息!很漂亮!夸夸艺术设计!

然后打开盒子拿出我们的X5,我只能说拿到手第一眼真的太帅了!!!中间的CPU采用了玻璃镜面设计,科技感一下就上来了,再加上X5板子的布局走线简直堪称一件精美的工艺品!(小声bb:都不敢拿手里了怕粘指纹在上面影响颜值...)

我们看一下X5的配置,相比于两年前的X3,RDK X5的CPU从4核A53升级为了8核A55,BPU的算力升级为了10TOPS同时还有了
32GFlops的GPU,最主要的是有了一个CAN口!!!
具体参数我整理了一下:
| CPU | 八核 CortesA55 |
|---|---|
| BPU | 10 TOPS |
| GPU | 32Gflops |
| 内存 | 4GB/8GB LPDDR4 |
| 储存 | NA, supports external Micro SD card Peripheral |
| Sensor | 2 x 4-lane MIPI CSI |
| USB Host | 4 x USB 3.0 Host interfaces(Type-A) |
| USB Device | 1 x USB 2.0 Device interface(Type-C) |
| Debug 串口 | 1 x Debug serial port(Micro USB) |
| 耳机 | 1 x 3.5mm headphone jack audio input/output |
| 无线网络 | Wi-Fi 6 & Bluetooth 5.4 |
| 有线网络 | 1 x Gigabit Ethernet RJ45 port with POE |
| CAN | 1x CAN FD |
| IO | 28 GPIOs (Reusable support 5 x UART, 8 x PWM, 3 x I2C, 2 x SPI, 1x I2S |
| 显示 | 1 x MIPI DSI 4 Lane,1 x HDMI Type-A port supporting up to 1080p60 |
| 系统支持 | Ubuntu22.04 |
我本来想用RDK X5最新支持的闪联技术的,但是不知道为什么我的电脑下载RDK Studio后会有报错然后又说找不到芯片烧录工具,不过也能理解闪连还是一个刚发布的工具,未来RDK Studio这一块地瓜的工作人员还有很大的优化空间,优化好了之后应该会是一个生产力极高的开发工具。

接着我们使用传统方法下载好镜像后用BalenaEtcher进行烧录制作TF卡,插上开机亮屏!!!


接下来我们先用键盘鼠标给X5连接一下网络,接着用MobaXterm来远程SSH连接我们的X5,连接上后之后用如下命令升级一下apt:
bash
sudo apt update
sudo apt upgradeX5的桌面版系统的使用体验比X3好了很多,CPU升级带来的变化是很明显的,以前用X3的时候用桌面版系统不超频的话老是卡卡的,远程连接X3也会时不时莫名其妙重启,但是现在X5能明显感觉速度非常流畅毕竟8核A55还是非常不错哒,但是真的习惯超频了所以还是顺手抄一下(doge),我们先照官方手册里频率管理一节的说法,使用如下命令对X5进行超频:
bash
echo 1 >/sys/devices/system/cpu/cpufreq/boost
echo performance >/sys/devices/system/cpu/cpu0/cpufreq/scaling_governor超完频之后我们就来体验一下X5的10TOPS算力吧!由于我还没有配地瓜官方的工具链所以我们今天直接来体验一下地瓜官网NodeHub里面的例程叭,首先我们打开NodeHub官网:地瓜机器人-NodeHub,找到Yolov8目标检测一栏,按照官方超哥的介绍X5上的Yolov8能跑到惊人的220FPS!!!(在实验室呆了两年了,从没打过算力这么充足的仗wwwwww),我们按照里面的部署教程开始一步一步配置(小声bb:好多文字错误呀)

我们一步一步输入一下命令:
bash
# 配置tros.b环境
source /opt/tros/humble/setup.bash
# 配置使用的摄像头类型(usb or mipi)
export CAM_TYPE=usb
# 启动launch文件
ros2 launch dnn_node_example dnn_node_example.launch.py dnn_example_config_file:=config/yolov2workconfig.json dnn_example_image_width:=480 dnn_example_image_height:=272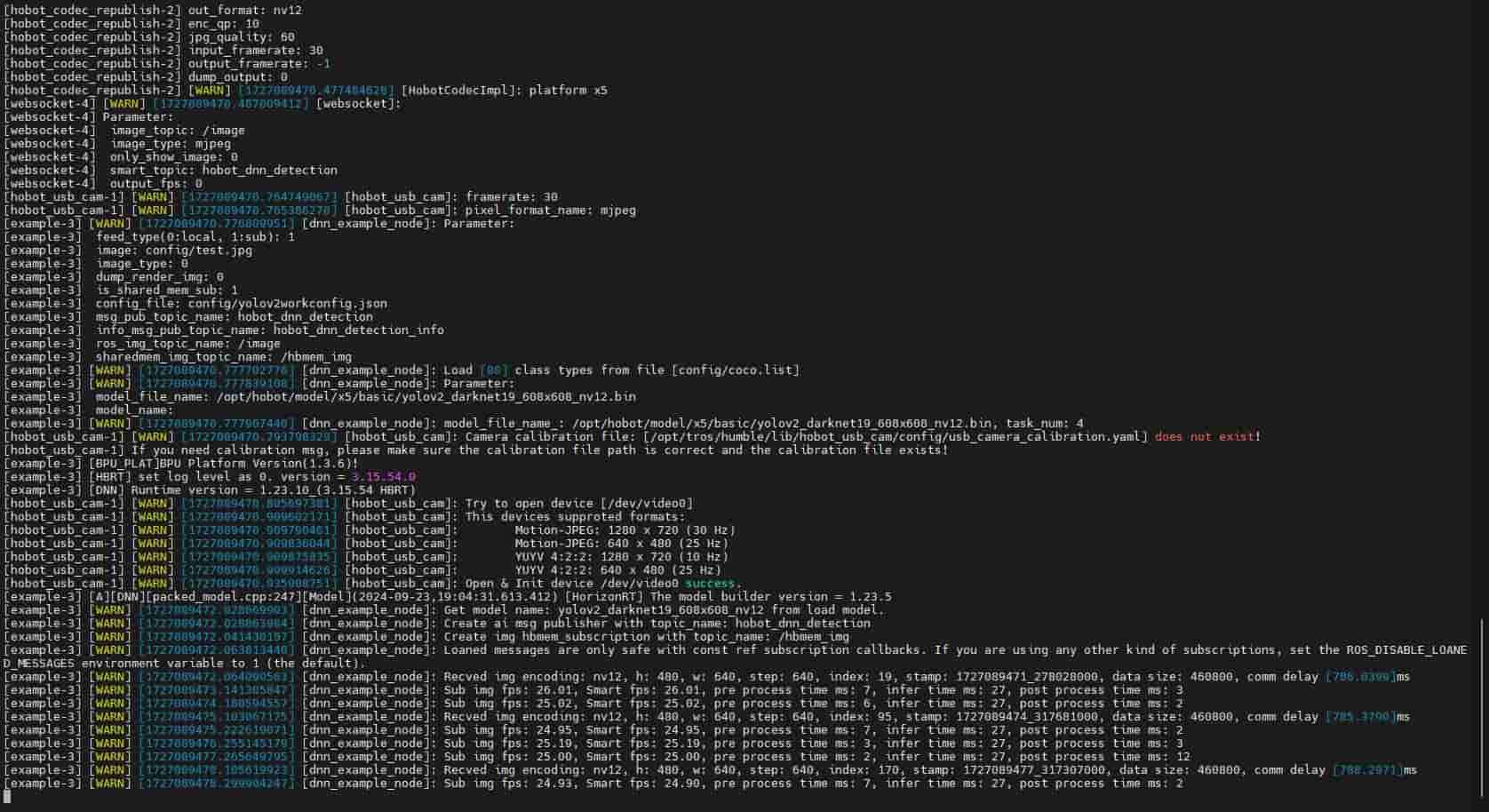
回车后运行打印出的结果如上,可以看到预处理部分花了7ms,推理部分使用了27ms,后处理花了3ms的样子,对比X3推理部分的时间真的快了不少,接着我们打开X5的网络界面查看实时推理的结果,我们在同一个网络环境下的任意设备打开浏览器,输入如下地址即可查看到X5的实时推理结果:
bash
板子的IP:8000 #端口为8000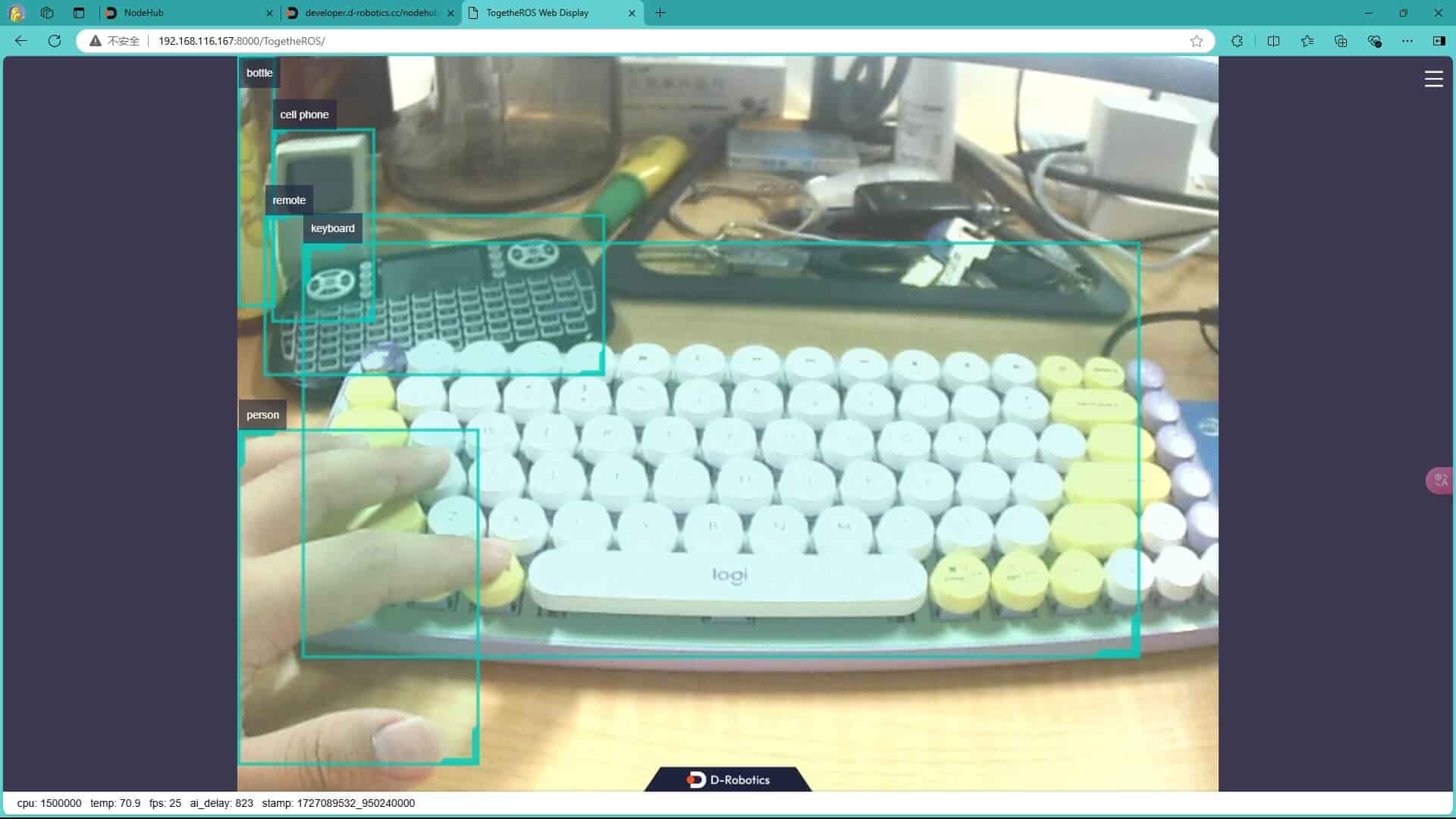
可以看到我们的推理结果还是非常准确的~
由于今天还需要上课,今天就只能先浅浅体验一下X5的Yolov8的表现了,接下来我还会发布更多的使用体验心得和发布一些项目,可以先关注我的博客,敬请期待啦!