通过生成对抗网络(GAN)训练和生成头像
目录
说明
电子书仓库:https://github.com/whuanle/cs_pytorch
Maomi.Torch 项目仓库:https://github.com/whuanle/Maomi.Torch
本文根据 Pytorch 官方文档的示例移植而来,部分文字内容和图片来自 Pytorch 文档,文章后面不再单独列出引用说明。
官方文档地址:
https://pytorch.org/tutorials/beginner/dcgan_faces_tutorial.html
社区中文翻译版本:https://pytorch.ac.cn/tutorials/beginner/dcgan_faces_tutorial.html
Pytorch 示例项目仓库:
https://github.com/pytorch/examples
对应 Python 版本示例:https://github.com/pytorch/tutorials/blob/main/beginner_source/dcgan_faces_tutorial.py
本文项目参考 dcgan 项目:https://github.com/whuanle/Maomi.Torch/tree/main/examples/dcgan
简介
本教程将通过一个示例介绍生成对抗网络(DCGAN),在教程中,我们将训练一个生成对抗网络 (GAN) 模型来生成新的名人头像。这里的大部分代码来自 pytorch/examples 中的 DCGAN 实现,然后笔者通过 C# 移植了代码实现,本文档将对该实现进行详尽的解释,并阐明该模型的工作原理和原因,阅读本文不需要 GAN 的基础知识,原理部分比较难理解,不用将精力放在这上面,主要是根据代码思路走一遍即可。
生成式对抗网络,简单来说就像笔者喜欢摄影,但是摄影水平跟专业摄影师有差距,然后不断苦练技术,每拍一张照片就让朋友判断是笔者拍的还是专业摄影师拍的,如果朋友一眼就发现是我拍的,说明水平还不行。然后一直练,一直拍,直到朋友区分不出照片是笔者拍的,还是专业摄影师拍的,这就是生成式对抗网络。
设计生成式对抗网络,需要设计生成网络和判断网络,生成网络读取训练图片并训练转换生成输出结果,然后由判断器识别,检查生成的图片和训练图片的差异,如果判断器可以区分出生成的图片和训练图片的差异,说明还需要继续训练,直到判断器区分不出来。
什么是 GAN
GANs 是一种教深度学习模型捕捉训练数据分布的框架,这样我们可以从相同的分布生成新的数据。GANs 由 Ian Goodfellow 于 2014 年发明,并首次在论文 Generative Adversarial Nets 中描述。它们由两个不同的模型组成,一个是生成器 ,另一个是判别器。生成器的任务是生成看起来像训练图像的"假"图像。判别器的任务是查看图像,并输出它是否是真实训练图像或来自生成器的假图像。在训练期间,生成器不断尝试通过生成越来越好的假图像来欺骗判别器,而判别器则努力成为一名更好的侦探,正确分类真实图像和假图像。这场博弈的平衡点是生成器生成完美的假图像,看起来似乎直接来自训练数据,而判别器总是以 50% 的置信度猜测生成器的输出是真实的还是假的。
现在,让我们定义一些将在整个教程中使用的符号,从判别器开始。设 \(x\) 为表示图像的数据。\(D(x)\) 是判别器网络,输出 \(x\) 来自训练数据而不是生成器的(标量)概率。这里,由于我们处理的是图像,\(D(x)\) 的输入是 CHW 尺寸为 3x64x64 的图像。直观上,当 \(x\) 来自训练数据时,\(D(x)\) 应该是高的,而当 \(x\) 来自生成器时,\(D(x)\) 应该是低的。\(D(x)\) 也可以视为传统的二分类器。
对于生成器的符号,设 \(z\) 为从标准正态分布中采样的潜在空间向量。\(G(z)\) 表示将潜在向量 \(z\) 映射到数据空间的生成器函数。\(G\) 的目标是估计训练数据来自的分布 (\(p_{data}\)),以便从该估计分布中生成假样本 (\(p_g\))。
因此,\(D(G(z))\) 是生成器输出 \(G\) 为真实图像的概率(标量)。如 Goodfellow 的论文 中所描述,\(D\) 和 \(G\) 进行一个极小极大博弈,其中 \(D\) 尽量最大化它正确分类真实和假的概率 (\(logD(x)\)),而 \(G\) 尽量最小化 \(D\) 预测其输出为假的概率 (\(log(1-D(G(z)))\))。在这篇论文中,GAN 损失函数为
\\\underset{G}{\\text{min}} \\underset{D}{\\text{max}}V(D,G) = \\mathbb{E}_{x\\sim p_{data}(x)}\\big\[logD(x)\\big + \mathbb{E}{z\sim p{z}(z)}\biglog(1-D(G(z))\\big \]
理论上,这个极小极大博弈的解是 \(p_g = p_{data}\),而判别器随机猜测输入是真实的还是假的。然而,GANs 的收敛理论仍在积极研究中,实际上模型并不总是能够训练到这一点。
什么是 DCGAN
DCGAN 是上述 GAN 的直接扩展,不同之处在于它在判别器和生成器中明确使用了卷积层和反卷积层。Radford 等人在论文《利用深度卷积生成对抗网络进行无监督表示学习》中首次描述了这种方法。判别器由步幅卷积层、批量归一化层以及LeakyReLU激活函数组成。输入是一个 3x64x64 的输入图像,输出是一个标量概率,表示输入是否来自真实的数据分布。生成器由反卷积层、批量归一化层和ReLU激活函数组成。输入是从标准正态分布中抽取的潜在向量 \(z\),输出是一个 3x64x64 的 RGB 图像。步幅的反卷积层允许将潜在向量转换为具有与图像相同形状的体积。在论文中,作者还提供了一些如何设置优化器、如何计算损失函数以及如何初始化模型权重的建议,这些将在后续章节中解释。
然后引入依赖并配置训练参数:
csharp
using dcgan;
using Maomi.Torch;
using System.Diagnostics;
using TorchSharp;
using TorchSharp.Modules;
using static TorchSharp.torch;
// 使用 GPU 启动
Device defaultDevice = MM.GetOpTimalDevice();
torch.set_default_device(defaultDevice);
// Set random seed for reproducibility
var manualSeed = 999;
// manualSeed = random.randint(1, 10000) # use if you want new results
Console.WriteLine("Random Seed:" + manualSeed);
random.manual_seed(manualSeed);
torch.manual_seed(manualSeed);
Options options = new Options()
{
Dataroot = "E:\\datasets\\celeba",
// 设置这个可以并发加载数据集,加快训练速度
Workers = 10,
BatchSize = 128,
};稍后讲解如何下载图片数据集。
用于训练的人像图片数据集大概是 22万张,不可能一次性全部加载,所以需要设置 BatchSize 参数分批导入、分批训练,如果读者的 GPU 性能比较高,则可以设置大一些。
参数说明
前面提到了 Options 模型类定义训练模型的参数,下面给出每个参数的详细说明。
注意字段名称略有差异,并且移植版本并不是所有参数都用上。
dataroot- 数据集文件夹根目录的路径。我们将在下一节中详细讨论数据集。workers- 用于使用DataLoader加载数据的工作线程数。batch_size- 训练中使用的批大小。DCGAN 论文使用 128 的批大小。image_size- 用于训练的图像的空间大小。此实现默认为 64x64。如果需要其他大小,则必须更改 D 和 G 的结构。有关更多详细信息,请参阅 此处。nc- 输入图像中的颜色通道数。对于彩色图像,此值为 3。nz- 潜在向量的长度。ngf- 与通过生成器传递的特征图的深度有关。ndf- 设置通过判别器传播的特征图的深度。num_epochs- 要运行的训练 epoch 数。训练时间越长可能会带来更好的结果,但也会花费更长的时间。lr- 训练的学习率。如 DCGAN 论文中所述,此数字应为 0.0002。beta1- Adam 优化器的 beta1 超参数。如论文中所述,此数字应为 0.5。ngpu- 可用的 GPU 数量。如果此值为 0,则代码将在 CPU 模式下运行。如果此数字大于 0,则它将在那几个 GPU 上运行。
首先定义一个全局参数模型类,并设置默认值:
csharp
public class Options
{
/// <summary>
/// Root directory for dataset
/// </summary>
public string Dataroot { get; set; } = "data/celeba";
/// <summary>
/// Number of workers for dataloader
/// </summary>
public int Workers { get; set; } = 2;
/// <summary>
/// Batch size during training
/// </summary>
public int BatchSize { get; set; } = 128;
/// <summary>
/// Spatial size of training images. All images will be resized to this size using a transformer.
/// </summary>
public int ImageSize { get; set; } = 64;
/// <summary>
/// Number of channels in the training images. For color images this is 3
/// </summary>
public int Nc { get; set; } = 3;
/// <summary>
/// Size of z latent vector (i.e. size of generator input)
/// </summary>
public int Nz { get; set; } = 100;
/// <summary>
/// Size of feature maps in generator
/// </summary>
public int Ngf { get; set; } = 64;
/// <summary>
/// Size of feature maps in discriminator
/// </summary>
public int Ndf { get; set; } = 64;
/// <summary>
/// Number of training epochs
/// </summary>
public int NumEpochs { get; set; } = 5;
/// <summary>
/// Learning rate for optimizers
/// </summary>
public double Lr { get; set; } = 0.0002;
/// <summary>
/// Beta1 hyperparameter for Adam optimizers
/// </summary>
public double Beta1 { get; set; } = 0.5;
/// <summary>
/// Number of GPUs available. Use 0 for CPU mode.
/// </summary>
public int Ngpu { get; set; } = 1;
}数据集处理
本教程中,我们将使用 Celeb-A Faces 数据集 来训练模型,可以从链接网站或在 Google Drive 下载。
数据集官方地址:https://mmlab.ie.cuhk.edu.hk/projects/CelebA.html
可以通过 Google 网盘或百度网盘下载:
https://pan.baidu.com/s/1CRxxhoQ97A5qbsKO7iaAJg
提取码:
rp0s
注意,本文只需要用到图片,不需要用到标签,不用下载所有文件,只需要下载 CelebA/Img/img_align_celeba.zip 即可。下载后解压到一个空目录中,其目录结构示例:
sh
/path/to/celeba
-> img_align_celeba
-> 188242.jpg
-> 173822.jpg
-> 284702.jpg
-> 537394.jpg
...然后在 Options.Dataroot 参数填写 /path/to/celeba 即可,导入数据集时会自动搜索该目录下的子目录,将子目录作为图像的分类名称,然后向子目录加载所有图像文件。
这是一个重要步骤,因为我们将使用 ImageFolder 数据集类,该类要求数据集根文件夹中有子目录。现在,我们可以创建数据集,创建数据加载器,设置运行设备,并最终可视化一些训练数据。
csharp
// 创建一个 samples 目录用于输出训练过程中产生的输出效果
if(Directory.Exists("samples"))
{
Directory.Delete("samples", true);
}
Directory.CreateDirectory("samples");
// 加载图像并对图像做转换处理
var dataset = MM.Datasets.ImageFolder(options.Dataroot, torchvision.transforms.Compose(
torchvision.transforms.Resize(options.ImageSize),
torchvision.transforms.CenterCrop(options.ImageSize),
torchvision.transforms.ConvertImageDtype(ScalarType.Float32),
torchvision.transforms.Normalize(new double[] { 0.5, 0.5, 0.5 }, new double[] { 0.5, 0.5, 0.5 }))
);
// 分批加载图像
var dataloader = torch.utils.data.DataLoader(dataset, batchSize: options.BatchSize, shuffle: true, num_worker: options.Workers, device: defaultDevice);
var netG = new dcgan.Generator(options).to(defaultDevice);在设置好输入参数并准备好数据集后,我们现在可以进入实现部分。我们将从权重初始化策略开始,然后详细讨论生成器、判别器、损失函数和训练循环。
权重初始化
根据 DCGAN 论文,作者指出所有模型权重应从均值为 0,标准差为 0.02 的正态分布中随机初始化。weights_init 函数以已初始化的模型为输入,重新初始化所有卷积层、转置卷积层和批量归一化层以满足此标准。此函数在模型初始化后立即应用于模型。
csharp
static void weights_init(nn.Module m)
{
var classname = m.GetType().Name;
if (classname.Contains("Conv"))
{
if (m is Conv2d conv2d)
{
nn.init.normal_(conv2d.weight, 0.0, 0.02);
}
}
else if (classname.Contains("BatchNorm"))
{
if (m is BatchNorm2d batchNorm2d)
{
nn.init.normal_(batchNorm2d.weight, 1.0, 0.02);
nn.init.zeros_(batchNorm2d.bias);
}
}
}网络模型会有多层结构,模型训练时到不同的层时会自动调用 weights_init 函数初始化,作用对象不是模型本身,而是网络模型的层。
生成器
生成器 \(G\) 旨在将潜在空间向量 ( \(z\) ) 映射到数据空间。由于我们的数据是图像,将 \(z\) 转换为数据空间意味着最终要创建一个与训练图像具有相同大小的 RGB 图像 (即 3x64x64)。在实践中,这是通过一系列步幅为二维的卷积转置层来实现的,每一层都配有一个 2d 批量规范化层和一个 relu 激活函数。生成器的输出通过一个 tanh 函数返回到输入数据范围 \(-1,1\) 。值得注意的是在 conv-transpose 层之后存在批量规范化函数,因为这是 DCGAN 论文的重要贡献之一。这些层有助于训练期间梯度的流动。下图显示了 DCGAN 论文中的生成器。
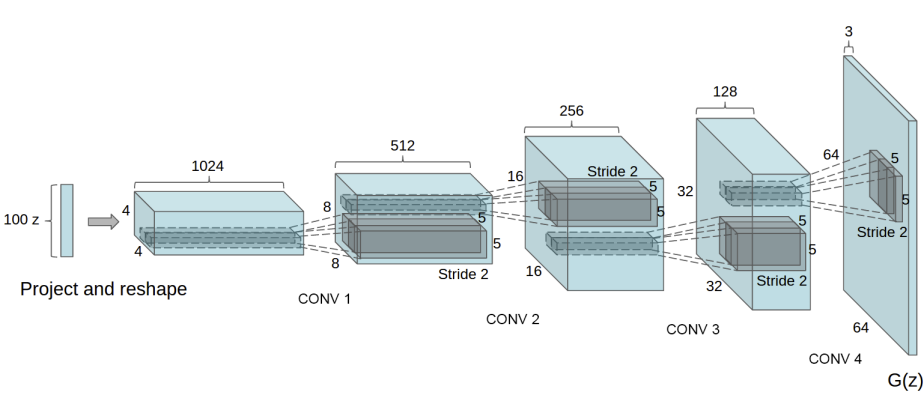
请注意,我们在输入部分设置的输入(nz,ngf,和 nc)如何影响代码中生成器的架构。nz 是 z 输入向量的长度,ngf 与在生成器中传播的特征图的大小有关,而 nc 是输出图像中的通道数(对于 RGB 图像设置为 3)。下面是生成器的代码。
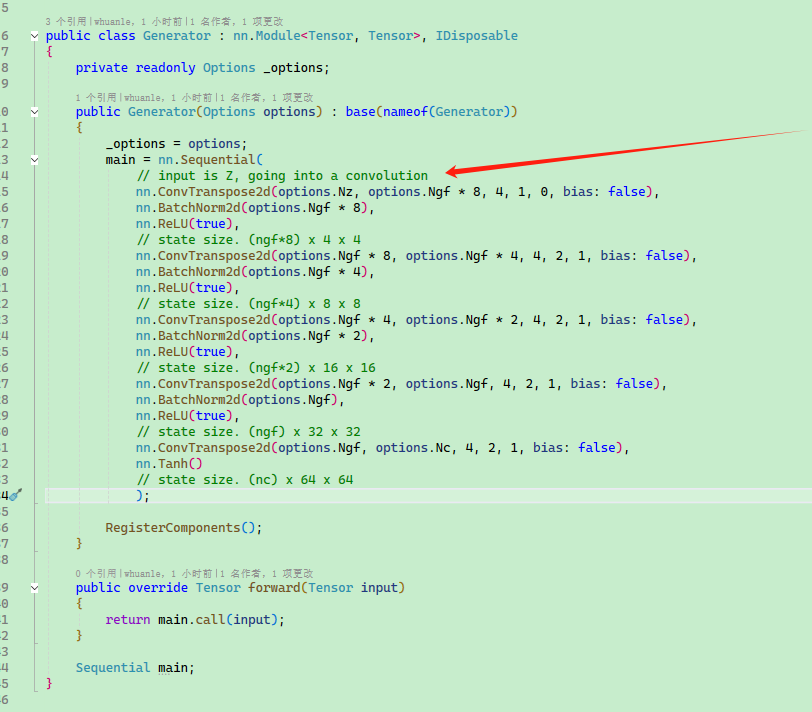
定义图像生成的网络模型:
csharp
public class Generator : nn.Module<Tensor, Tensor>, IDisposable
{
private readonly Options _options;
public Generator(Options options) : base(nameof(Generator))
{
_options = options;
main = nn.Sequential(
// input is Z, going into a convolution
nn.ConvTranspose2d(options.Nz, options.Ngf * 8, 4, 1, 0, bias: false),
nn.BatchNorm2d(options.Ngf * 8),
nn.ReLU(true),
// state size. (ngf*8) x 4 x 4
nn.ConvTranspose2d(options.Ngf * 8, options.Ngf * 4, 4, 2, 1, bias: false),
nn.BatchNorm2d(options.Ngf * 4),
nn.ReLU(true),
// state size. (ngf*4) x 8 x 8
nn.ConvTranspose2d(options.Ngf * 4, options.Ngf * 2, 4, 2, 1, bias: false),
nn.BatchNorm2d(options.Ngf * 2),
nn.ReLU(true),
// state size. (ngf*2) x 16 x 16
nn.ConvTranspose2d(options.Ngf * 2, options.Ngf, 4, 2, 1, bias: false),
nn.BatchNorm2d(options.Ngf),
nn.ReLU(true),
// state size. (ngf) x 32 x 32
nn.ConvTranspose2d(options.Ngf, options.Nc, 4, 2, 1, bias: false),
nn.Tanh()
// state size. (nc) x 64 x 64
);
RegisterComponents();
}
public override Tensor forward(Tensor input)
{
return main.call(input);
}
Sequential main;
}初始化模型:
csharp
var netG = new dcgan.Generator(options).to(defaultDevice);
netG.apply(weights_init);
Console.WriteLine(netG);判别器
如前所述,判别器 \(D\) 是一个二分类网络,它以图像为输入并输出一个标量概率,即输入图像是真实的(而非伪造的)的概率。这里,\(D\) 接受一个 3x64x64 的输入图像,通过一系列的 Conv2d、BatchNorm2d 和 LeakyReLU 层进行处理,并通过 Sigmoid 激活函数输出最终的概率。根据问题的需要,可以扩展这一架构以包含更多层数,但使用跨步卷积、BatchNorm 和 LeakyReLUs 是有意义的。DCGAN 论文提到,使用跨步卷积而非池化来进行下采样是一个好习惯,因为它使网络能够学习其自己的池化函数。此外,批量规范化和 leaky relu 函数促进了健康的梯度流动,这对 \(G\) 和 \(D\) 的学习过程至关重要。
定义判别器网络模型:
csharp
public class Discriminator : nn.Module<Tensor, Tensor>, IDisposable
{
private readonly Options _options;
public Discriminator(Options options) : base(nameof(Discriminator))
{
_options = options;
main = nn.Sequential(
// input is (nc) x 64 x 64
nn.Conv2d(options.Nc, options.Ndf, 4, 2, 1, bias: false),
nn.LeakyReLU(0.2, inplace: true),
// state size. (ndf) x 32 x 32
nn.Conv2d(options.Ndf, options.Ndf * 2, 4, 2, 1, bias: false),
nn.BatchNorm2d(options.Ndf * 2),
nn.LeakyReLU(0.2, inplace: true),
// state size. (ndf*2) x 16 x 16
nn.Conv2d(options.Ndf * 2, options.Ndf * 4, 4, 2, 1, bias: false),
nn.BatchNorm2d(options.Ndf * 4),
nn.LeakyReLU(0.2, inplace: true),
// state size. (ndf*4) x 8 x 8
nn.Conv2d(options.Ndf * 4, options.Ndf * 8, 4, 2, 1, bias: false),
nn.BatchNorm2d(options.Ndf * 8),
nn.LeakyReLU(0.2, inplace: true),
// state size. (ndf*8) x 4 x 4
nn.Conv2d(options.Ndf * 8, 1, 4, 1, 0, bias: false),
nn.Sigmoid()
);
RegisterComponents();
}
public override Tensor forward(Tensor input)
{
var output = main.call(input);
return output.view(-1, 1).squeeze(1);
}
Sequential main;
}初始化模型:
csharp
var netD = new dcgan.Discriminator(options).to(defaultDevice);
netD.apply(weights_init);
Console.WriteLine(netD);损失函数和优化器
设置好 \(D\) 和 \(G\) 后,我们可以通过损失函数和优化器指定它们的学习方式。我们将使用二元交叉熵损失函数(BCELoss),它在 PyTorch 中定义如下:
\\\ell(x, y) = L = \\{l_1,\\dots,l_N\\}\^\\top, \\quad l_n = - \\left\[ y_n \\cdot \\log x_n + (1 - y_n) \\cdot \\log (1 - x_n) \\right \]
请注意,这个函数提供了目标函数中两个对数分量,即 \(log(D(x))\) 和 \(log(1-D(G(z)))\) 的计算。我们可以通过 \(y\) 输入来指定使用 BCE 方程的哪一部分。这将在即将到来的训练循环中完成,但是了解我们可以通过改变 \(y\)(即 GT 标签)选择希望计算的分量非常重要。
接下来,我们将真实标签定义为 1,假的标签定义为 0。这些标签将在计算 \(D\) 和 \(G\) 的损失时使用,这也是原始 GAN 论文中使用的约定。最后,我们设置两个独立的优化器,一个用于 \(D\),另一个用于 \(G\)。根据 DCGAN 论文的规定,两者都是 Adam 优化器,学习率为 0.0002,Beta1 = 0.5。为了追踪生成器的学习进展,我们将生成一个从高斯分布中抽取的固定批次的潜在向量(即 fixed_noise)。在训练循环中,我们将定期将这个 fixed_noise 输入 \(G\),并且在迭代过程中,我们将看到图像从噪声中形成。
csharp
var criterion = nn.BCELoss();
var fixed_noise = torch.randn(new long[] { options.BatchSize, options.Nz, 1, 1 }, device: defaultDevice);
var real_label = 1.0;
var fake_label = 0.0;
var optimizerD = torch.optim.Adam(netD.parameters(), lr: options.Lr, beta1: options.Beta1, beta2: 0.999);
var optimizerG = torch.optim.Adam(netG.parameters(), lr: options.Lr, beta1: options.Beta1, beta2: 0.999);训练
最后,在我们定义了GAN框架的所有部分之后,我们可以开始训练它了。请注意,训练GANs在某种程度上是一门艺术,因为不正确的超参数设置会导致模式崩溃,并且很难解释出了什么问题。在这里,我们将紧密遵循 Goodfellow的论文 中的算法1,同时遵循一些在ganhacks中显示的最佳实践。具体来说,我们将"为真实和虚假的图像构建不同的小批量",并调整G的目标函数以最大化 \(log(D(G(z)))\) 。训练分为两个主要部分:第一部分更新判别器,第二部分更新生成器。
第1部分 - 训练判别器
回顾一下,训练判别器的目标是最大化正确分类给定输入为真实或虚假的概率。根据Goodfellow的说法,我们希望"通过上升随机梯度来更新判别器"。实际上,我们希望最大化 \(log(D(x)) + log(1-D(G(z)))\) 。根据 ganhacks 的独立小批量建议,我们将分两步计算这一点。首先,我们将从训练集中构建一个真实样本的小批量,前向传递通过 \(D\),计算损失 ( \(log(D(x))\) ) ,然后反向传递计算梯度。其次,我们将使用当前的生成器构建一个虚假样本的小批量,将此批次前向传递通过 \(D\),计算损失 ( \(log(1-D(G(z)))\) ),并通过反向传递累积梯度。现在,随着从全真和全假批次累积的梯度,我们调用判别器优化器的一步。
第2部分 - 训练生成器
如原论文所述,我们希望通过最小化 \(log(1-D(G(z)))\) 来训练生成器,以便生成更好的虚假样本。如前所述,Goodfellow 显示这在学习过程中尤其是早期不会提供足够的梯度。作为解决方案,我们希望最大化 \(log(D(G(z)))\) 。在代码中,我们通过以下方法实现这一点:使用判别器对第1部分生成器的输出进行分类,使用真实标签作为GT计算G的损失,在反向传递中计算G的梯度,最后用优化器一步更新G的参数。使用真实标签作为损失函数的GT标签可能看起来违反直觉,但这允许我们使用 BCELoss 的 \(log(x)\) 部分(而不是 \(log(1-x)\) 部分),这正是我们所需要的。
最后,我们将进行一些统计报告,并且在每个epoch结束时,我们将通过生成器推送我们的固定噪声批次,以便直观地跟踪G的训练进度。报告的训练统计数据包括:
- Loss_D - 判别器损失,计算为全真和全假批次损失的总和 ( \(log(D(x)) + log(1 - D(G(z)))\) )。
- Loss_G - 生成器损失,计算为 \(log(D(G(z)))\)
- D(x) - 判别器对全真批次的平均输出(跨批次)。这应该从接近 1 开始,然后在G变好时理论上收敛到 0.5。想想这是为什么。
- D(G(z)) - 判别器对全假批次的平均输出。第一个数字是 D 更新之前的,第二个数字是 D 更新之后的。这些数字应该从接近0开始,并在 G 变好时收敛到 0.5。想想这是为什么。
注意: 这一步可能需要一段时间,具体取决于你运行了多少个epochs以及是否从数据集中删除了一些数据。
csharp
var img_list = new List<Tensor>();
var G_losses = new List<double>();
var D_losses = new List<double>();
Console.WriteLine("Starting Training Loop...");
Stopwatch stopwatch = new();
stopwatch.Start();
int i = 0;
// For each epoch
for (int epoch = 0; epoch < options.NumEpochs; epoch++)
{
foreach (var item in dataloader)
{
var data = item[0];
netD.zero_grad();
// Format batch
var real_cpu = data.to(defaultDevice);
var b_size = real_cpu.size(0);
var label = torch.full(new long[] { b_size }, real_label, dtype: ScalarType.Float32, device: defaultDevice);
// Forward pass real batch through D
var output = netD.forward(real_cpu);
// Calculate loss on all-real batch
var errD_real = criterion.call(output, label);
// Calculate gradients for D in backward pass
errD_real.backward();
var D_x = output.mean().item<float>();
// Train with all-fake batch
// Generate batch of latent vectors
var noise = torch.randn(new long[] { b_size, options.Nz, 1, 1 }, device: defaultDevice);
// Generate fake image batch with G
var fake = netG.call(noise);
label.fill_(fake_label);
// Classify all fake batch with D
output = netD.call(fake.detach());
// Calculate D's loss on the all-fake batch
var errD_fake = criterion.call(output, label);
// Calculate the gradients for this batch, accumulated (summed) with previous gradients
errD_fake.backward();
var D_G_z1 = output.mean().item<float>();
// Compute error of D as sum over the fake and the real batches
var errD = errD_real + errD_fake;
// Update D
optimizerD.step();
////////////////////////////
// (2) Update G network: maximize log(D(G(z)))
////////////////////////////
netG.zero_grad();
label.fill_(real_label); // fake labels are real for generator cost
// Since we just updated D, perform another forward pass of all-fake batch through D
output = netD.call(fake);
// Calculate G's loss based on this output
var errG = criterion.call(output, label);
// Calculate gradients for G
errG.backward();
var D_G_z2 = output.mean().item<float>();
// Update G
optimizerG.step();
// ex: [0/25][4/3166] Loss_D: 0.5676 Loss_G: 7.5972 D(x): 0.9131 D(G(z)): 0.3024 / 0.0007
Console.WriteLine($"[{epoch}/{options.NumEpochs}][{i%dataloader.Count}/{dataloader.Count}] Loss_D: {errD.item<float>():F4} Loss_G: {errG.item<float>():F4} D(x): {D_x:F4} D(G(z)): {D_G_z1:F4} / {D_G_z2:F4}");
// 每处理 100 批,输出一次图片效果
if (i % 100 == 0)
{
real_cpu.SaveJpeg("samples/real_samples.jpg");
fake = netG.call(fixed_noise);
fake.detach().SaveJpeg("samples/fake_samples_epoch_{epoch:D3}.jpg");
}
i++;
}
netG.save("samples/netg_{epoch}.dat");
netD.save("samples/netd_{epoch}.dat");
}最后打印训练结果和输出:
csharp
Console.WriteLine("Training finished.");
stopwatch.Stop();
Console.WriteLine("Training Time: {stopwatch.Elapsed}");
netG.save("samples/netg.dat");
netD.save("samples/netd.dat");按照官方示例推荐进行 25 轮训练,由于笔者使用使用 4060TI 8G 机器训练,训练 25 轮大概时间:
Training finished.
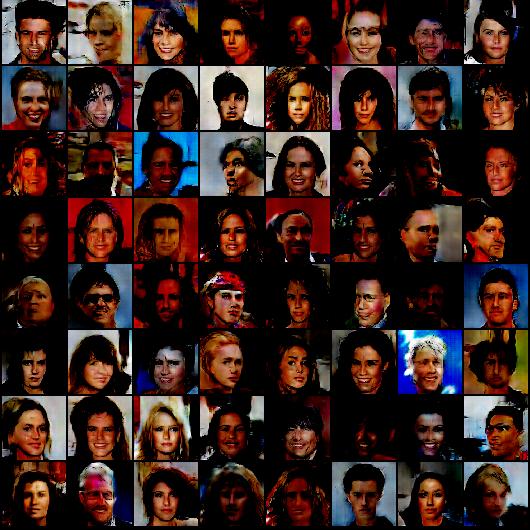
Training Time: 00:49:45.6976041每轮训练结果的图像:
第一轮训练生成:
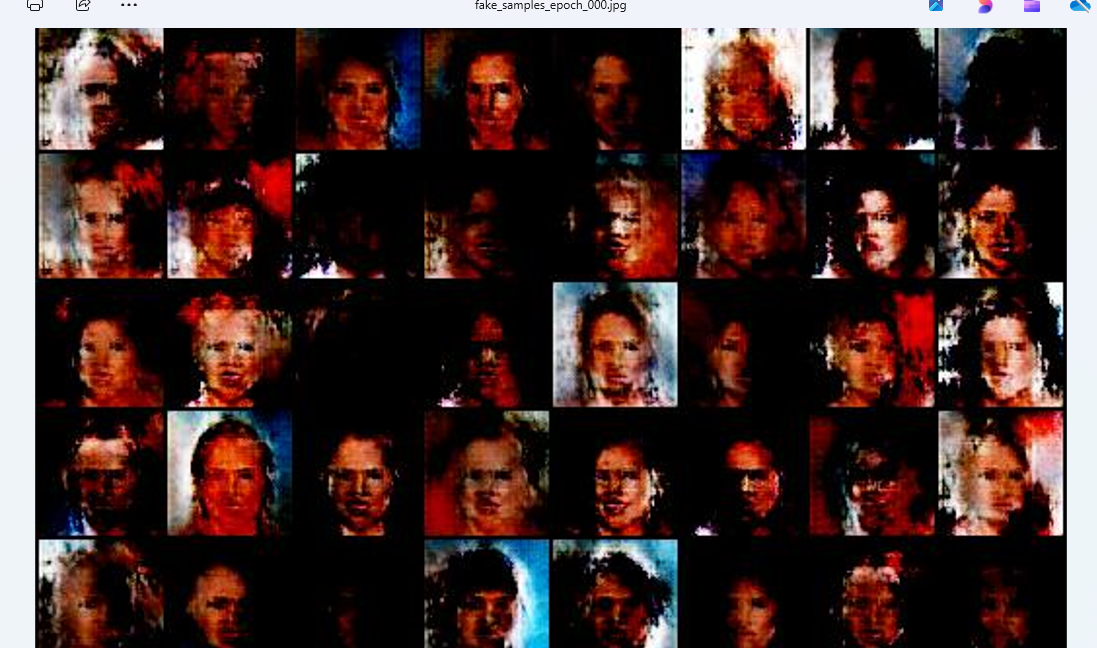
第 25 轮生成的:
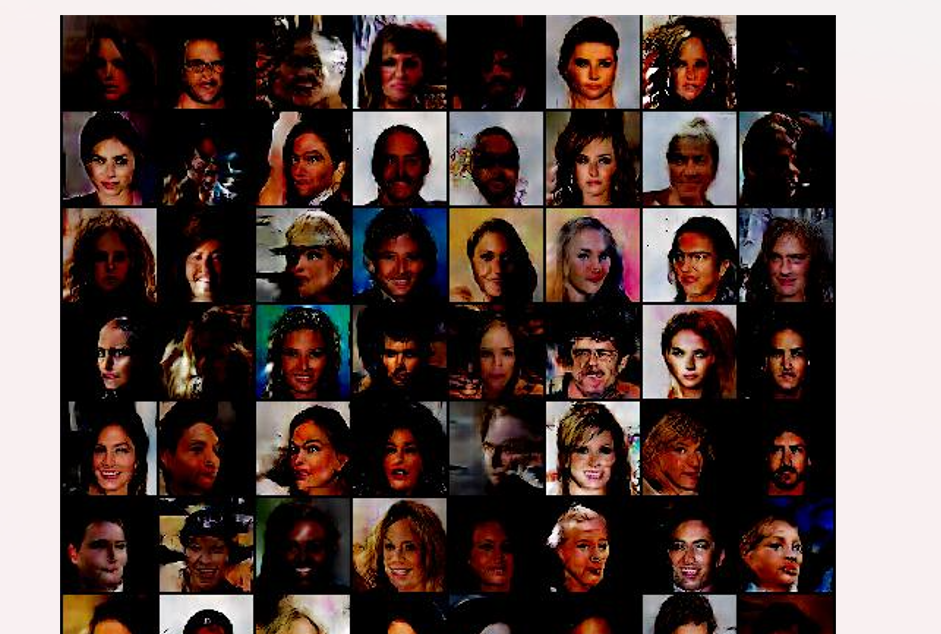
虽然还是有些抽象,但生成结果比之前好一些了。
在 dcgan_out 项目中开业看到,使用 5 轮训练结果输出的模型,生成图像:
csharp
Device defaultDevice = MM.GetOpTimalDevice();
torch.set_default_device(defaultDevice);
// Set random seed for reproducibility
var manualSeed = 999;
// manualSeed = random.randint(1, 10000) # use if you want new results
Console.WriteLine("Random Seed:" + manualSeed);
random.manual_seed(manualSeed);
torch.manual_seed(manualSeed);
Options options = new Options()
{
Dataroot = "E:\\datasets\\celeba",
Workers = 10,
BatchSize = 128,
};
var netG = new dcgan.Generator(options);
netG.to(defaultDevice);
netG.load("netg.dat");
// 生成随机噪声
var fixed_noise = torch.randn(64, options.Nz, 1, 1, device: defaultDevice);
// 生成图像
var fake_images = netG.call(fixed_noise);
fake_images.SaveJpeg("fake_images.jpg");虽然还是有些抽象,但确实还行。