在上一篇探讨线段树的文章中 https://www.cnblogs.com/ofnoname/p/18625369,我们已经掌握了如何利用线段树高效处理数组区间查询与更新问题。这种经典线段树以数组下标为构建基础,完美解决了诸如区间求和、最值查询等典型场景。
而线段树结构还有另外一个用处:想象这样一个场景:我们需要实时统计当前集合中数值在[L,R]范围内的元素个数,或者快速查询第K大的数值。此时,**权值线段树(Weight Segment Tree)**便闪亮登场------它巧妙的维护基础从"数组下标"转换为"值域空间",开辟了线段树应用的新维度。
与常规线段树不同,权值线段树面临两个独特挑战:首先,值域范围可能非常庞大(如[1,1e9]),使得传统的数组存储方式变得不切实际;其次,值域分布往往极其稀疏(仅有少量离散点被使用)。这促使我们放弃静态的数组表示法,转而采用动态节点生成的指针表示法,只在必要时创建节点,从而大幅节省空间。
权值线段树的基本原理
从下标维护到值域维护
传统线段树维护的是数组下标区间的信息,例如:
- 区间和:\(\text{sum}(l, r) = \sum_{i=l}^{r} a_i\)
- 区间最大值:\(\max(l, r) = \max(a_l, a_{l+1}, \dots, a_r)\)
而权值线段树(也称为值域线段树 )维护的是数值的值域区间,例如:
- 数值在 \(L, R\) 范围内的出现次数
- 整个集合中第 \(K\) 小的数
二叉树的表示方法
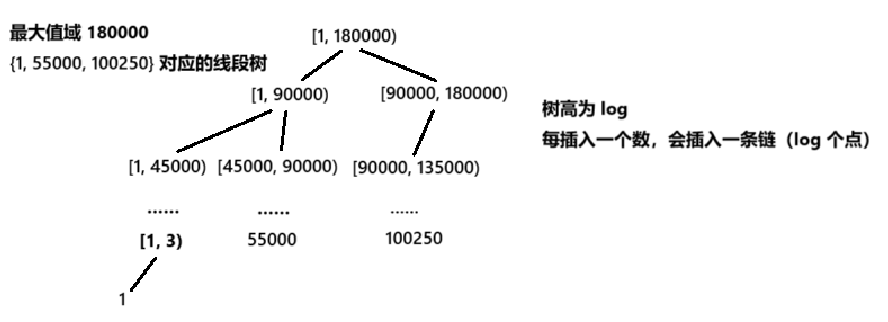
线段树是一个二叉树。由于权值线段树的值域可能非常大(如 \(1, 10\^9\)),甚至稀疏(仅有少量数值被插入),我们无法像传统线段树那样使用固定数组存储 ,而必须采用动态节点生成的指针表示法:
数组表示法(静态存储)
- 适用于紧凑且值域较小 的情况(如 \(1, N\),\(N \leq 10^6\))
- 类似堆式存储,节点 \(i\) 的左儿子是 \(2i\),右儿子是 \(2i+1\)
- 缺点 :如果值域很大(如 \(1, 10\^9\)),空间爆炸
指针表示法(动态开点)
- 仅在实际插入数值时才创建对应的节点
- 每个节点存储:
- 值域区间 \(l, r\)
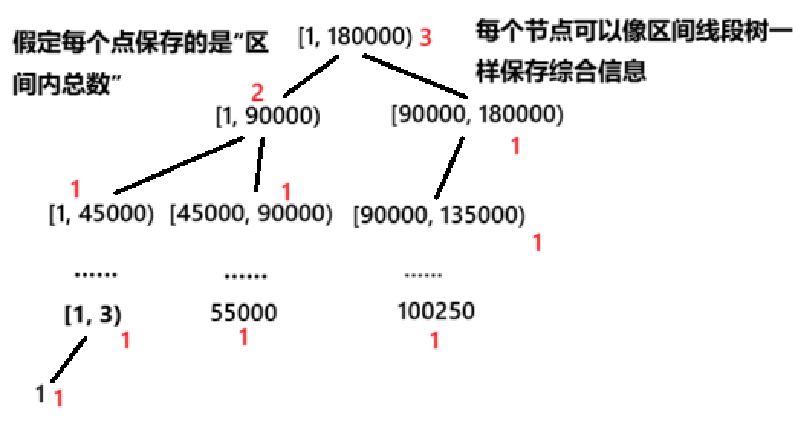
- 统计信息(如出现次数 \(cnt\),区间和 \(sum\))
- 左儿子
left和右儿子right指针
- 优点 :节省空间,仅 \(O(M \log N)\),其中 \(M\) 是操作次数,\(N\) 是值域范围
关键点:
- 只有被访问过的区间才会生成节点
- 父节点的信息由其子节点汇总(如
cnt = left->cnt + right->cnt)
权值线段树的实现细节
节点结构设计
我们采用面向对象的方式定义权值线段树的节点结构:
cpp
struct Node {
int l, r; // 值域区间[l,r]
int cnt; // 该值域内数字出现次数
int sum; // 该值域内数字的和(可选)
Node *left, *right; // 左右子节点指针
Node(int _l, int _r) : l(_l), r(_r), cnt(0), sum(0), left(nullptr), right(nullptr) {}
};核心操作:插入数值
每次插入一个数x时,我们从根节点开始递归更新线段树:
- 如果当前节点的值域区间l,r不包含x,直接返回
- 如果当前节点是叶子节点(l==r),更新统计信息
- 否则递归处理左右子树,并动态创建不存在的子节点
cpp
void insert(Node* root, int x) {
if (x < root->l || x > root->r) return;
if (root->l == root->r) {
root->cnt++;
root->sum += x;
return;
}
int mid = root->l + (root->r - root->l) / 2;
if (x <= mid) {
if (!root->left) root->left = new Node(root->l, mid);
insert(root->left, x);
} else {
if (!root->right) root->right = new Node(mid + 1, root->r);
insert(root->right, x);
}
// 更新父节点统计信息
root->cnt = (root->left ? root->left->cnt : 0)
+ (root->right ? root->right->cnt : 0);
root->sum = (root->left ? root->left->sum : 0)
+ (root->right ? root->right->sum : 0);
}查询值域统计
查询值域\(L,R\)内的数字个数(类似地可以查询和、最大值等):
cpp
int query(Node* root, int L, int R) {
if (!root || R < root->l || L > root->r) return 0;
if (L <= root->l && root->r <= R) return root->cnt;
return query(root->left, L, R) + query(root->right, L, R);
}
查询第K小的数
利用权值线段树可以高效查询第K小的数:
cpp
int kth(Node* root, int k) {
if (root->l == root->r) return root->l;
int left_cnt = root->left ? root->left->cnt : 0;
if (k <= left_cnt) return kth(root->left, k);
return kth(root->right, k - left_cnt);
}内存管理
由于采用动态开点,需要手动管理内存以避免泄漏:
cpp
void clear(Node* root) {
if (!root) return;
clear(root->left);
clear(root->right);
delete root;
}复杂度分析
时间复杂度分析
权值线段树的所有核心操作都遵循二叉树搜索模式,其时间复杂度主要取决于树的高度。设值域范围为\(1, N\):
- 插入操作 :每次插入需要从根节点递归到叶子节点,时间复杂度为\(O(\log N)\)
- 查询操作 :
- 区间统计查询:\(O(\log N)\)
- 第K小查询:\(O(\log N)\)
- 删除操作 (实现类似插入):\(O(\log N)\)
值得注意的是,这里的 \(N\) 是值域范围,而非元素个数。当值域极大时(如 \(1,10\^{18}\)),可以通过离散化预处理将\(N\)降至元素数量级。
空间复杂度分析
权值线段树的空间消耗主要来自动态创建的节点:
- 最坏情况 :每个操作都访问全新的路径,需要创建\(O(\log N)\)个新节点
- M次操作的空间消耗 :\(O(M \log N)\)
- 优化技巧 :
- 惰性删除:标记删除而非立即回收节点
- 内存池预分配:减少动态内存分配开销
下表对比了不同情况下的空间使用:
| 场景 | 空间复杂度 | 说明 |
|---|---|---|
| 静态数组实现 | \(O(N)\) | 值域较大时不可行 |
| 动态开点(最坏) | \(O(M \log N)\) | 每次操作都访问新路径 |
| 动态开点(平均) | \(O(K \log N)\) | K为一个小于 M 的数 |
与离散化的配合使用
对于极大值域但数据较为稀疏,若允许离线,可以先进行离散化处理:
cpp
vector<int> nums = {5, 3, 7, 1e9}; // 原始数据
sort(nums.begin(), nums.end());
nums.erase(unique(nums.begin(), nums.end()), nums.end());
// 建立值到排名的映射
unordered_map<int, int> val2rank;
for (int i = 0; i < nums.size(); ++i) {
val2rank[nums[i]] = i + 1; // 排名从1开始
}
// 此时权值线段树的值域可设为[1, nums.size()]
WeightSegmentTree tree(1, nums.size());离散化后的优势:
- 值域\(N\)从原始范围降至实际数据规模,此时可以改用区间线段树的四倍数组写法了。
- 保持数值间的大小关系不变
- 查询时需要先将查询边界值离散化
权值线段树 vs 平衡树
权值线段树和平衡树(如AVL树、红黑树)都可以解决以下常见问题:
- 动态插入/删除数值
- 查询第K小的数
- 统计值域区间内的元素个数
- 查询前驱/后继
但它们在实现方式和扩展性上存在本质差异:
功能实现方式对比
| 功能 | 权值线段树实现方式 | 平衡树实现方式 |
|---|---|---|
| 插入/删除 | 递归更新值域区间统计量 | 通过旋转操作维持平衡 |
| 第K小查询 | 利用子树节点数二分搜索 | 中序遍历或维护子树大小 |
| 前驱/后继查询 | 转化为值域边界查询 | 直接查找相邻节点 |
| 区间统计 | 天然支持区间求和/最值 | 需要额外维护统计信息 |
优先选择权值线段树当:
- 需要频繁查询第K小或区间统计
- 值域范围可离散化处理
- 需要可持久化或高维扩展
- 数据离线处理(预先知道值域)
优先选择平衡树当:
- 需要频繁插入/删除动态数据
- 需要有序遍历或范围迭代
- 处理非数值型数据或自定义比较
- 内存限制严格