⚙️ 一、核心工作原理对比
| 特性 | 步进电机 | 伺服电机 | 舵机 |
|---|---|---|---|
| 控制方式 | 开环控制(无反馈) | 闭环控制(编码器实时反馈) | 简化闭环控制(电位器/编码器反馈) |
| 驱动原理 | 脉冲信号→固定步距角转动 | 脉冲/模拟量→磁场调节→精准定位 | PWM信号→电位器反馈→位置闭环 |
| 信号类型 | 脉冲(方向+频率) | 脉冲/模拟量/CAN总线 | PWM(0.5~2.5ms脉宽) |
| 典型结构 | 定子线圈+磁性转子 | 永磁转子+编码器+驱动器 | 直流电机+减速齿轮+电位器+控制板 |
💡 关键区别 :舵机本质是低成本一体化的伺服系统,将电机、减速器、控制器集成于小型外壳内,但反馈精度较低(依赖电位器)。
📊 二、性能与参数对比
| 指标 | 步进电机 | 伺服电机 | 舵机 |
|---|---|---|---|
| 定位精度 | ±0.1°(无累积误差) | ±0.001°(编码器决定) | ±1°~5°(电位器线性度限制) |
| 扭矩特性 | 低速扭矩高,高速扭矩骤降 | 全速域恒扭矩(过载200%+) | 中低速扭矩大(齿轮减速放大) |
| 响应速度 | 慢(易丢步) | 极快(0-3000rpm<10ms) | 中等(0.1~0.2s/60°) |
| 旋转范围 | 连续旋转 | 连续旋转 | 通常0°~180°(部分可改装360°) |
| 能效 | 低(恒流供电) | 高(按需调节电流) | 中(空载电流低) |
| 振动噪音 | 高(低速共振明显) | 低(平滑控制) | 中(齿轮啮合噪音) |
⚠️ 舵机局限:
精度受电位器寿命影响,长期使用易漂移;
塑料齿轮易崩齿(金属齿轮型号成本更高)。
🏗️ 三、应用场景选择
| 需求场景 | 推荐类型 | 原因 |
|---|---|---|
| 低成本简易定位 | 舵机 | 集成度高,9g舵机单价<¥20(如SG90) |
| 中低速精密定位 | 步进电机 | 开环控制简单(如3D打印机、扫描仪) |
| 高速高精度动态控制 | 伺服电机 | 编码器反馈+三环控制(CNC机床、机械臂) |
| 模型/机器人关节 | 舵机(金属齿轮) | 小体积+大扭矩(航模舵机扭矩达30kg·cm) |
| 变负载抗干扰场景 | 伺服电机 | 实时力矩补偿(AGV驱动轮) |
✅ 舵机优势领域 :
无人机舵面、机器人关节、教育类项目(如Arduino平台)。
💰 四、成本与维护对比
| 方面 | 步进电机 | 伺服电机 | 舵机 |
|---|---|---|---|
| 系统成本 | 低(驱动器简单) | 高(编码器+复杂驱动器) | 极低(一体化设计) |
| 调试复杂度 | 简单(脉冲信号) | 高(PID参数整定) | 极简(PWM直连) |
| 维护成本 | 低(无电刷) | 中(编码器易损) | 中(齿轮磨损需更换) |
| 寿命 | >10万小时(轴承决定) | 5~8万小时 | 0.5~3万小时(齿轮寿命) |
🔧 舵机维护:塑料齿轮过载易扫齿,需拆解更换;电位器老化需校准。
⚡️ 五、选型决策树
图表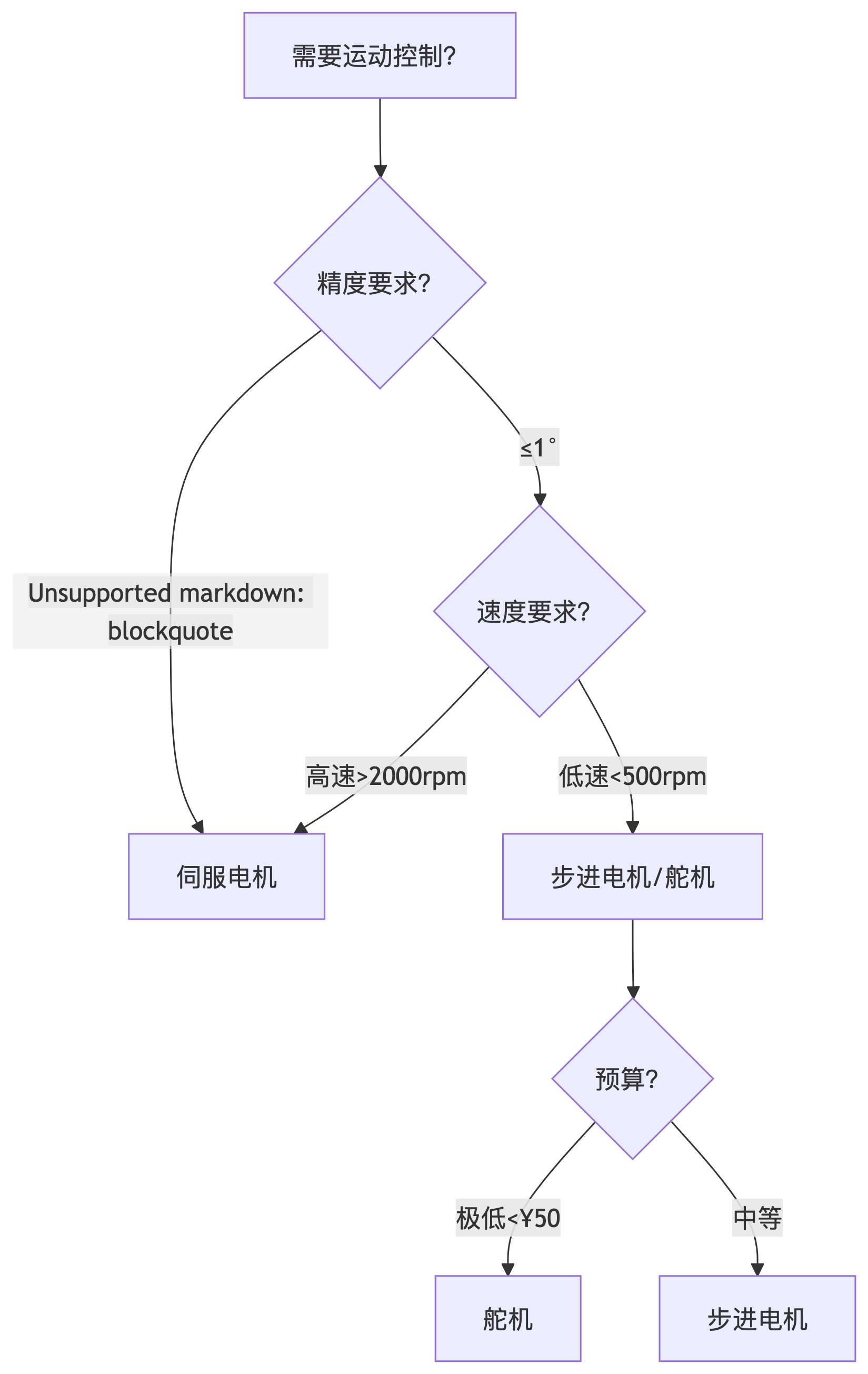
代码
graph TD
A[需要运动控制?] --> B{精度要求?}
B -->|≤1°| C{速度要求?}
B -->|>1°| D[伺服电机]
C -->|低速<500rpm| E[步进电机/舵机]
C -->|高速>2000rpm| D
E --> F{预算?}
F -->|极低<¥50| G[舵机]
F -->|中等| H[步进电机]典型场景示例:
机械臂关节:伺服电机(高精度)或金属齿轮舵机(低成本版);
窗帘自动控制:舵机(180°转动足够,成本<¥30);
激光切割机:伺服电机(μm级定位,高速响应)。
💎 总结:核心差异一句话
-
步进电机 :开环控制,脉冲驱动,成本最低,适合稳定负载的低速定位。
-
伺服电机 :闭环王者,高精度动态响应,工业级性能的代价是高成本。
-
舵机 :平民伺服,PWM控角度,小空间大扭矩的模型神器,精度妥协者。