目录
[2.1 基本概念](#2.1 基本概念)
[2.2 动作原理](#2.2 动作原理)
[2.2.1 组成部分](#2.2.1 组成部分)
[2.2.2 工作原理](#2.2.2 工作原理)
[2.3 模块关键参数](#2.3 模块关键参数)
[2.4 模块设计](#2.4 模块设计)
[2.4.1 电路设计及分析编辑](#2.4.1 电路设计及分析编辑)
[2.4.2 引脚设计](#2.4.2 引脚设计)
[2.5 负载类型与选型](#2.5 负载类型与选型)
[3.1 硬件组成](#3.1 硬件组成)
[3.2 继电器模块接线图](#3.2 继电器模块接线图)
[3.3 硬件连接](#3.3 硬件连接)
[4.1 开发环境配置](#4.1 开发环境配置)
[4.2 关键代码实现](#4.2 关键代码实现)
[4.2.1 GPIO初始化](#4.2.1 GPIO初始化)
[4.2.2 继电器控制函数](#4.2.2 继电器控制函数)
[5.1 循环开关控制](#5.1 循环开关控制)
[5.2 状态反馈检测](#5.2 状态反馈检测)
一、系统概述
本系统采用STM32F103C8T6最小系统板通过标准外设库驱动5V继电器模块,实现高电压/大电流负载的智能开关控制。系统包含电气隔离保护电路,适用于智能家居、工业控制等需要安全切换交流负载的场合。
二、5V继电器模块简介
2.1 基本概念
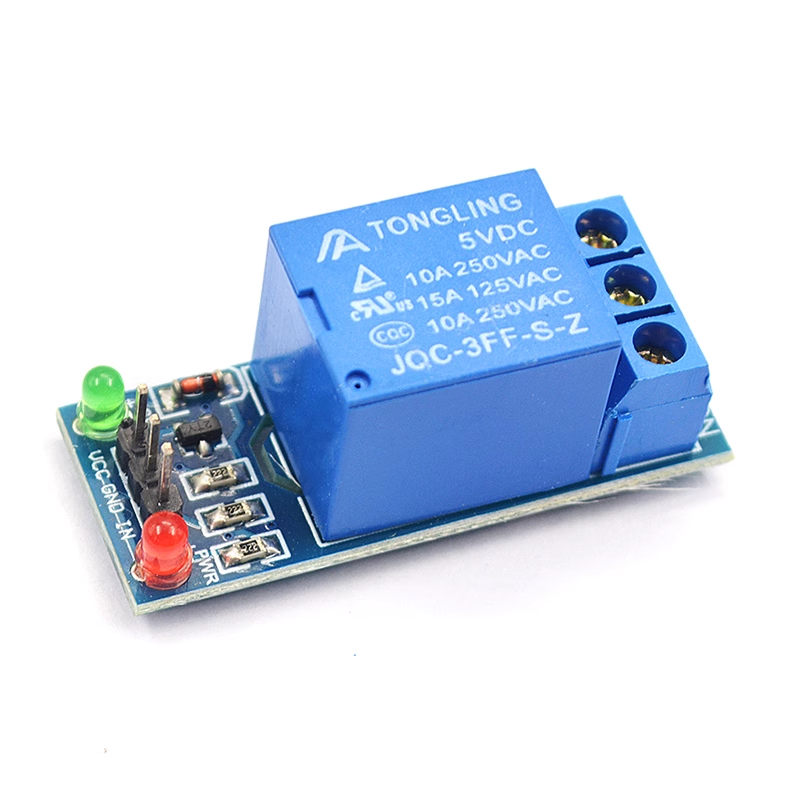
5V继电器模块是一种电控机械开关装置,通过小电流控制大电流负载的通断。其核心部件是电磁继电器,组成结构如下:
-
电磁线圈(5V直流驱动)
-
机械触点(常开NO/常闭NC/公共端COM)
-
弹簧机构
-
塑料/金属外壳
2.2 动作原理
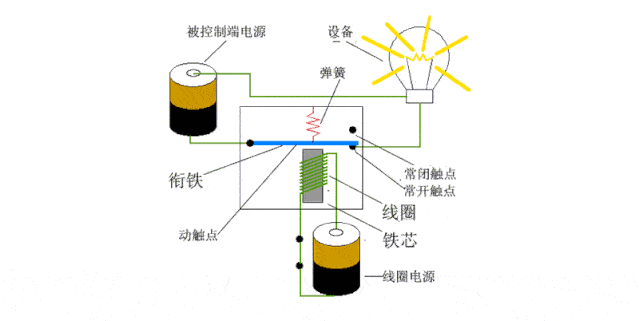
2.2.1 组成部分
- 线圈电源:为继电器的线圈提供工作电压,通常是直流电源。当线圈电源接通时,电流通过线圈,产生磁场。
- 线圈:缠绕在铁芯上的导线绕组。当电流通过线圈时,会产生电磁场,使铁芯磁化。
- 铁芯:通常由软磁材料制成,用于增强线圈产生的磁场。铁芯被磁化后,会吸引衔铁。
- 衔铁:可移动的铁磁部件,位于线圈和铁芯的附近。当铁芯被磁化时,衔铁会被吸引向铁芯。
- 弹簧:用于提供回复力。当线圈断电时,弹簧会将衔铁拉回原位。
- 动触点:与衔铁连接,随衔铁的移动而移动。
- 常闭触点(NC):在继电器未通电时,动触点与常闭触点接触,电路处于闭合状态。
- 常开触点(NO):在继电器未通电时,动触点与常开触点断开,电路处于断开状态。当继电器通电时,动触点与常开触点接触,电路闭合。
- 被控制端电源:连接到设备的电源,用于为外部设备供电。
- 设备:继电器控制的外部负载,例如灯泡、电机等。
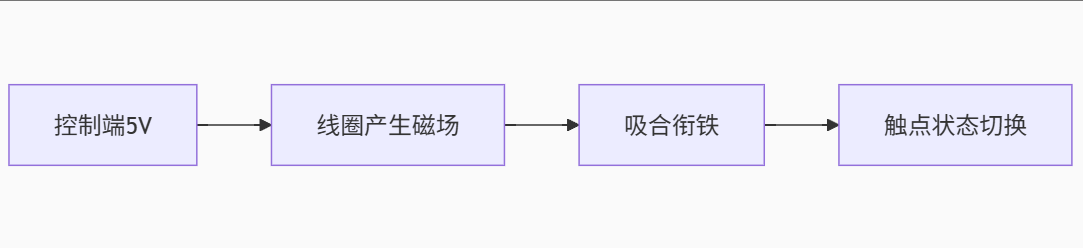
2.2.2 工作原理
未通电状态:
- 线圈中没有电流,铁芯未被磁化,弹簧将衔铁拉回原位。
- 动触点与常闭触点(NC)接触,常开触点(NO)断开。此时,如果被控制端电源连接到常闭触点,设备将处于通电状态;如果连接到常开触点,设备将处于断电状态。
通电状态:
- 线圈电源接通,电流通过线圈,产生磁场,铁芯被磁化。
- 磁化的铁芯吸引衔铁,克服弹簧的拉力,使衔铁移动。
- 衔铁带动动触点移动,动触点与常闭触点断开,与常开触点接触。此时,如果被控制端电源连接到常开触点,设备将通电工作;如果连接到常闭触点,设备将断电。
断电状态恢复:
- 线圈电源断开,线圈中的电流消失,铁芯失去磁性。
- 弹簧的回复力将衔铁拉回原位,动触点与常开触点断开,与常闭触点接触,电路恢复到未通电状态。
工作流程示意图:
2.3 模块关键参数
| 参数 | 典型值 | 说明 |
|---|---|---|
| 线圈电压 | 5V DC | 驱动电压范围±10% |
| 线圈电流 | 70-100mA | 需外接驱动电路 |
| 触点容量 | 10A 250VAC | 阻性负载最大值 |
| 动作时间 | ≤10ms | 吸合/释放时间 |
| 机械寿命 | 10万次 | 额定负载下 |
| 隔离电压 | 2500Vrms | 线圈与触点间 |
2.4 模块设计
2.4.1 电路设计及分析
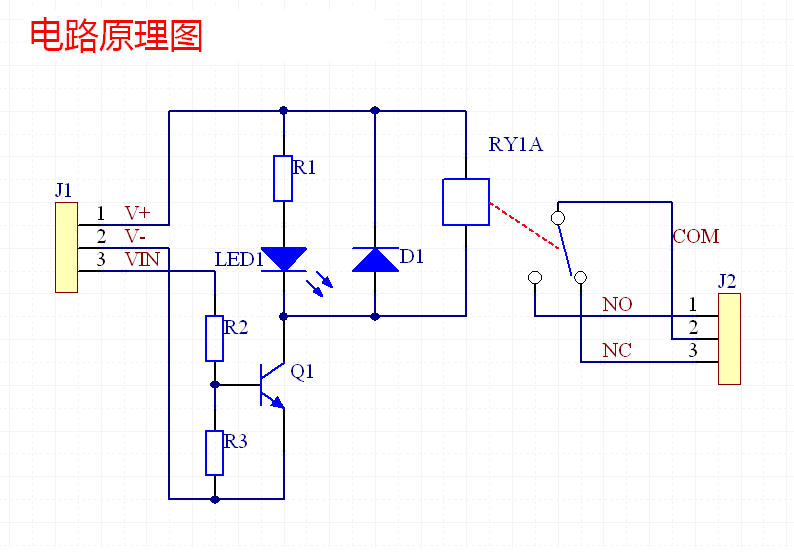
电源接口(J1):
- V+(引脚1):电路的正电源输入端,为整个电路提供工作电压。
- V-(引脚2):电路的负电源或地端,通常连接到电源的负极或系统的参考地。
- VIN(引脚3):可能是另一个电源输入或控制信号输入端,具体功能需结合实际应用确定。
状态指示部分:
- LED1:发光二极管,用于指示电路的工作状态。当有电流通过时,LED1会发光。
- R1:限流电阻,与LED1串联,用于限制通过LED1的电流,防止电流过大损坏LED1。
- R2:基极电阻,连接到晶体管Q1的基极,用于控制基极电流,从而控制晶体管的导通和截止。
- Q1:晶体管(可能是NPN型),作为开关使用。当基极有足够的电流时,晶体管导通,允许电流从集电极流向发射极。
- R3:可能是晶体管Q1的发射极电阻或其他功能电阻,具体作用取决于电路设计,例如可能用于稳定工作点或提供偏置电流。
继电器部分:
- RY1A:继电器,是一种电磁开关。当继电器的线圈通电时,会产生磁场,使继电器的触点闭合或断开,从而控制外部电路的通断。
- D1:续流二极管,与继电器线圈并联。当继电器线圈断电时,会产生反向电动势,D1为这个反向电动势提供一个释放回路,防止其损坏其他电路元件。
继电器触点部分:
- COM:公共触点,是继电器触点的公共连接点。
- NO(Normally Open):常开触点,当继电器线圈未通电时,该触点与COM触点断开;当线圈通电时,该触点与COM触点闭合。
- NC(Normally Closed):常闭触点,当继电器线圈未通电时,该触点与COM触点闭合;当线圈通电时,该触点与COM触点断开。
- J2:继电器触点的输出接口,用于连接外部负载或电路。
工作原理:
- 控制信号输入:通过VIN引脚或其他控制信号输入到晶体管Q1的基极,控制Q1的导通和截止。
- 继电器线圈通电:当Q1导通时,电流通过继电器线圈RY1A,产生磁场,使继电器的触点动作。
- 触点切换:继电器触点根据其类型(NO或NC)进行切换,从而控制外部电路的通断。
- 状态指示:当电路正常工作时,LED1会发光,指示电路处于工作状态。
2.4.2 引脚设计

|------|------|
| 引脚名称 | 描述 |
| DC+ | 电源正极 |
| DC- | 电源负极 |
| IN | 控制信号 |
| NO | 常开接口 |
| COM | 公共接口 |
| NC | 常闭接口 |
2.5 负载类型与选型
| 负载类型 | 选型要点 | 保护措施 |
|---|---|---|
| 阻性负载 | 直接匹配额定电流 | 无需特殊保护 |
| 感性负载 | 降额50%使用 | 并联RC吸收电路 |
| 容性负载 | 抑制浪涌电流 | 串联限流电阻 |
| 电机负载 | 选择3倍额定电流的继电器 | 添加压敏电阻 |
通过合理选型和规范设计,5V继电器模块可安全可靠地实现强弱电隔离控制。关键要确保:
-
驱动电路带载能力足够
-
负载不超过触点额定值
-
感性负载必须添加保护电路
-
高压部分符合安全规范
三、硬件设计
3.1 硬件组成
-
STM32F103C8T6最小系统板
-
5V继电器模块(带光耦隔离)
-
面包板及连接线
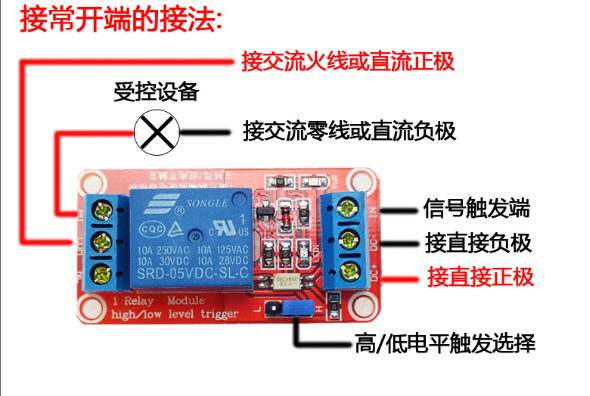
3.2 继电器模块接线图
3.3 硬件连接
| STM32引脚 | 连接元件 | 说明 |
|---|---|---|
| PB9 | 三极管基极 | 控制信号输出 |
| 5V | 继电器VCC | 模块电源 |
| GND | 继电器GND | 共地 |
| - | 继电器IN | 接三极管集电极 |
| - | 继电器COM/NO/NC | 接被控负载 |
四、软件设计
4.1 开发环境配置
-
开发工具:Keil MDK-ARM
-
库版本:STM32F10x标准外设库
-
调试工具:ST-Link V2
4.2 关键代码实现
4.2.1 GPIO初始化
#include "stm32f10x.h"
#include "stm32f10x_gpio.h"
#include "stm32f10x_rcc.h"
void Relay_Init(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
// 使能GPIOB时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE);
// 配置PB9为推挽输出
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB, &GPIO_InitStructure);
// 初始状态关闭
GPIO_ResetBits(GPIOB, GPIO_Pin_9);
}- 推挽输出确保足够的驱动电流(STM32 GPIO最大25mA)
- 高速模式优化开关响应速度
- 初始状态设为低电平(
GPIO_ResetBits)防止上电误动作
4.2.2 继电器控制函数
void Relay_ON(void)
{
GPIO_SetBits(GPIOB, GPIO_Pin_9); // 高电平吸合
}
void Relay_OFF(void)
{
GPIO_ResetBits(GPIOB, GPIO_Pin_9); // 低电平释放
}
void Relay_Toggle(uint32_t duration_ms)
{
Relay_ON();
Delay_ms(duration_ms);
Relay_OFF();
}五、应用示例
5.1 循环开关控制
void Timer_Control(uint32_t on_time, uint32_t off_time)
{
Relay_ON();
Delay_ms(on_time);
Relay_OFF();
Delay_ms(off_time);
}典型参数:
- 吸合时间:继电器典型5-10ms
- 建议最小保持时间:>50ms(防止快速切换磨损触点)
5.2 状态反馈检测
uint8_t Relay_Status(void)
{
return GPIO_ReadOutputDataBit(GPIOB, GPIO_Pin_9);
}六、注意事项
电气隔离:
-
确保继电器模块与STM32共地
-
高压侧与低压侧保持安全距离
负载选择:
-
不超过继电器触点额定值(10A/250VAC)
-
感性负载(如电机)需并联RC吸收电路
安全规范:
-
高压部分必须绝缘处理
-
避免同时切换零火线
-
上电前检查线路短路
七、常见问题解决
继电器不动作:
| 检测点 | 正常值 | 异常处理 |
|---|---|---|
| 三极管基极 | 0.6-0.7V | 检查GPIO输出和电阻 |
| 三极管集电极 | <0.5V(导通时) | 更换β值更大的三极管 |
| 线圈两端电压 | ≈4.5-5V | 检查电源带载能力 |
八、总结
本设计实现了继电器的安全可靠控制,具有以下特点:
-
完备的电气隔离保护
-
硬件防反电动势设计
-
支持多种控制模式
-
易于扩展多路控制
-
符合工业安全标准
实际应用中需根据具体负载特性调整保护电路参数。