三点之间设置阈值,如果第三点到其余两点的距离大于阈值,那么就在引出一条线来
#*************************参数引入**************************
import cv2
from matplotlib import pyplot as plt#导入 Matplotlib 库中的 pyplot 模块,并命名为 plt。
#Matplotlib 是一个强大的绘图库,常用于绘制图表和图像显示。
#就是窗口
# OpenCV BGR(Blue, Green, Red)
# Matplotlib RGB(Red, Green, Blue)
import numpy as np #导入 NumPy 库,并命名为 np。
#NumPy 提供了多维数组对象及各种派生对象(如掩模数组),并且包含大量用于数组快速操作的函数。
#************************************************************
#***************检测图片是否传入***********************************
# 如果图像不在脚本所在目录,请提供完整路径
img1_t = cv2.imread(r"D:/Professional software package(new)/VS Projects/OPenCv/Picture/IMG_20231230_171718.jpg")#使用 OpenCV 函数读取图像文件。
img2_t = cv2.imread(r"D:/Professional software package(new)/VS Projects/OPenCv/Picture/202310281019103.jpg") #它返回的是一个 NumPy 数组,其中包含了图像的像素数据。如果没有找到图像或路径错误,img 将是 None。
img3_t = cv2.imread(r"D:/Professional software package(new)/VS Projects/OPenCv/Picture/maoci1.jpg") #它返回的是一个 NumPy 数组,其中包含了图像的像素数据。如果没有找到图像或路径错误,img 将是 None。
Template_image=cv2.imread(r"D:/Professional software package(new)/VS Projects/OPenCv/Picture/moban.jpg")
lunkuojiance_img=cv2.imread(r"D:/Professional software package(new)/VS Projects/OPenCv/Picture/lunkuojiance.jpg")
lunkuojiance_img2=cv2.imread(r"D:/Professional software package(new)/VS Projects/OPenCv/Picture/lunkuojiance2.jpg")
# 检查图片是否成功加载
if img1_t is None:
print("Error: 图像1加载失败,请检查文件路径和文件权限。")
elif img2_t is None:
print("Error: 图像2加载失败,请检查文件路径和文件权限。")
elif img3_t is None:
print("Error: 图像3加载失败,请检查文件路径和文件权限。")
elif Template_image is None:
print("Error: 模板图片加载失败,请检查文件路径和文件权限。")
elif lunkuojiance_img is None:
print("Error: 轮廓图片加载失败,请检查文件路径和文件权限。")
elif lunkuojiance_img2 is None:
print("Error: 轮廓图片2加载失败,请检查文件路径和文件权限。")
else:
# 将 BGR 图像转换为 RGB 图像以供 matplotlib 正确显示
print(" 图像加载成功!")
img1_rgb = cv2.cvtColor(img1_t, cv2.COLOR_BGR2RGB)#由于 OpenCV 默认使用 BGR 格式来存储图像数据,而大多数其他图像处理工具(包括 Matplotlib)使用 RGB 格式。 #因此,在用 Matplotlib 显示图像之前,我们需要将图像从 BGR 格式转换为 RGB 格式。
img3_rgb = cv2.cvtColor(img3_t, cv2.COLOR_BGR2RGB)
img2_rgb = cv2.cvtColor(img2_t, cv2.COLOR_BGR2RGB)
Template_image_rgb= cv2.cvtColor(Template_image, cv2.COLOR_BGR2RGB)
lunkuojiance_img_rgb= cv2.cvtColor(lunkuojiance_img, cv2.COLOR_BGR2RGB)
lunkuojiance_img2_rgb= cv2.cvtColor(lunkuojiance_img2, cv2.COLOR_BGR2RGB)
img1_rgb = cv2.cvtColor(img1_rgb, cv2.COLOR_BGR2RGB)#由于 OpenCV 默认使用 BGR 格式来存储图像数据,而大多数其他图像处理工具(包括 Matplotlib)使用 RGB 格式。 #因此,在用 Matplotlib 显示图像之前,我们需要将图像从 BGR 格式转换为 RGB 格式。
img3_rgb = cv2.cvtColor(img3_rgb, cv2.COLOR_BGR2RGB)
img2_rgb = cv2.cvtColor(img2_rgb, cv2.COLOR_BGR2RGB)
Template_image_rgb= cv2.cvtColor(Template_image_rgb, cv2.COLOR_BGR2RGB)
lunkuojiance_img_rgb= cv2.cvtColor(lunkuojiance_img_rgb, cv2.COLOR_BGR2RGB)
lunkuojiance_img2_rgb= cv2.cvtColor(lunkuojiance_img2_rgb, cv2.COLOR_BGR2RGB)
#RGB 和 BGR 只是颜色通道的不同排序
#*******************************************************************
#*****************图片展示函数**************************************
#参数为 图片名称 图片 时间 缩放百分比
def CV_Show(name,img,time,percent):
scale_percent = percent # 百分比
width = int(img.shape[1] * scale_percent / 100) #shape[1]:图片的宽度
height = int(img.shape[0] * scale_percent / 100) #shape[0]:图片的高度
dim = (width, height)#格式为 (width, height)
resized_img = cv2.resize(img, dim,interpolation=cv2.INTER_AREA)
cv2.imshow(name, resized_img)
cv2.waitKey(time*1000)#显示多少秒
cv2.destroyAllWindows()
#**************************************************************
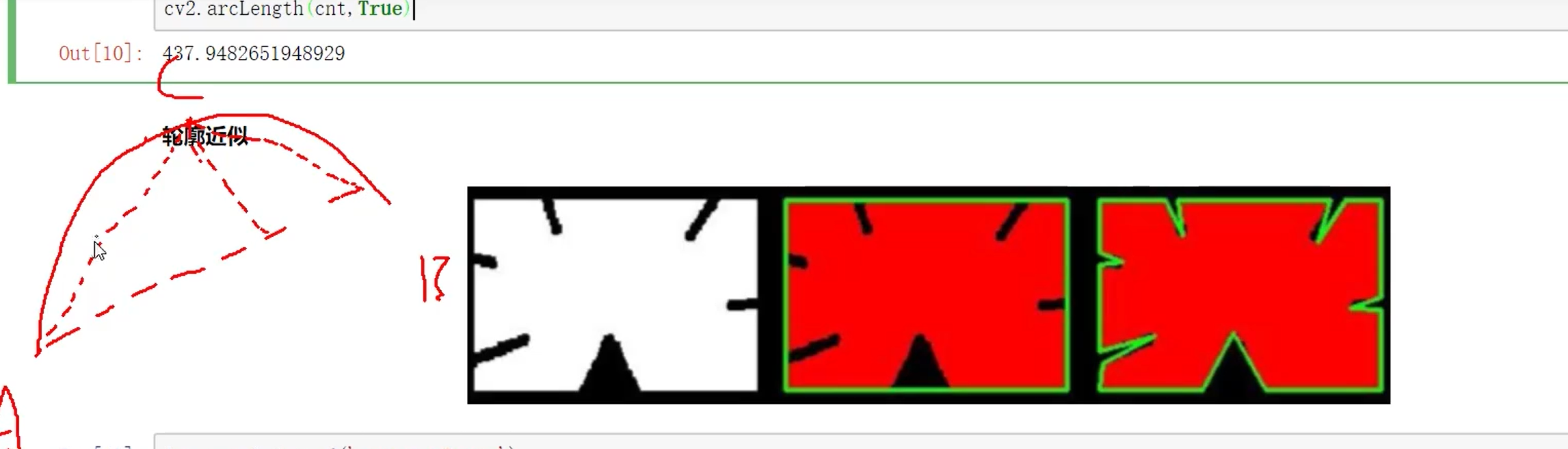
#************************轮廓特征和近似**********************************
lunkuojiance_img_gray= cv2.cvtColor(lunkuojiance_img_rgb, cv2.COLOR_BGR2GRAY)
lunkuojiance_img_gray_ret, lunkuojiance_img_gray_thresh=cv2. threshold(lunkuojiance_img_gray, 127, 255, cv2.THRESH_BINARY)
lunkuojiance_img_gray_contours, lunkuojiance_img_gray_hierarchy=cv2. findContours(lunkuojiance_img_gray_thresh, cv2.RETR_TREE,cv2.CHAIN_APPROX_NONE)
#print(len(lunkuojiance_img_gray_contours))
#lunkuojiance_img_gray_contours:返回的是一个 Python 列表,其中每个元素都是由 (x,y) 坐标组成的数组,这些坐标描述了一个轮廓。列表中的每个元素代表一个独立的轮廓。
#lunkuojiance_img_gray_hierarchy 是什么?
# next 同一层级中下一个轮廓的索引
# previous 同一层级中前一个轮廓的索引
# first_child 第一个子轮廓的索引
# parent 父轮廓的索引(如果没有父轮廓,则为 -1)
# [[ 1 -1 -1 -1] # 第0个轮廓:下一个轮廓是1,没有前一个、没有子轮廓、没有父轮廓
# [ 2 0 -1 -1] # 第1个轮廓:下一个是2,前一个是0,没有子轮廓,没有父轮廓
# [-1 1 -1 -1] # 第2个轮廓:没有下一个,前一个是1,没有子轮廓,没有父轮廓
# ...
# ]
#print(lunkuojiance_img_gray_hierarchy)
cnt=lunkuojiance_img_gray_contours[0]
draw_img = lunkuojiance_img_rgb.copy()
res=cv2.drawContours(draw_img, [cnt],-1,(0,0,255), 2)#[cnt]: 表示要绘制的轮廓列表(可以传多个)
cv2.imshow ('res',res)
cv2.waitKey(0)#显示多少秒,0表示无
cv2.destroyAllWindows()
#**********************画出轮廓缩放函数***********************************
#cnt:轮廓列表
epsilon=0.01*cv2.arcLength(cnt, True) #这个值越小,结果越接近原始曲线,但包含的点也越多。
approx=cv2. approxPolyDP (cnt, epsilon, True) #轮廓改变值
draw_img =lunkuojiance_img_rgb.copy()
res = cv2. drawContours(draw_img, [approx],-1, (0,0,255),2)
cv2.imshow ('res',res)
cv2.waitKey(0)#显示多少秒,0表示无
cv2.destroyAllWindows()
#函数介绍
#cv2.arcLength(curve, closed)
# 作用:计算曲线的周长或闭合轮廓的周长。
# 参数:
# curve: 输入的向量,通常是找到的轮廓点集。也就是轮廓
# closed: 布尔值,指定曲线是否闭合。如果为True,则计算闭合轮廓的周长;如果为False,则计算开放曲线的长度。
# cv2.approxPolyDP(curve, epsilon, closed)
# 作用:通过Douglas-Peucker算法对曲线进行逼近,返回一个简化后的曲线,该曲线包含的点数更少。
# 参数:
# curve: 输入的向量,通常是找到的轮廓点集。
# epsilon: 指定逼近精度的最大距离偏差。这个值越小,结果越接近原始曲线,但包含的点也越多。
# closed: 布尔值,指定曲线是否闭合。
# cv2.drawContours(image, contours, contourIdx, color[, thickness[, lineType[, hierarchy[, maxLevel[, offset]]]]])
# 作用:在图像上绘制轮廓或填充轮廓。
# 参数:
# image: 目标图像。
# contours: 要绘制的所有轮廓集合(列表)。
# contourIdx: 指定要绘制的轮廓索引。如果是负数(如-1),则绘制所有轮廓。
# color: 轮廓的颜色(对于RGB图像,使用BGR格式)。
# thickness: 轮廓线的厚度。如果为负值(如FILLED),则填充轮廓内部。
#*************************************************
#*****************画出矩形框住 轮廓*****************
lunkuojiance_img2_gray= cv2.cvtColor(lunkuojiance_img2_rgb, cv2.COLOR_BGR2GRAY)
lunkuojiance_img2_gray_ret, lunkuojiance_img2_gray_thresh=cv2. threshold(lunkuojiance_img2_gray, 127, 255, cv2.THRESH_BINARY)
lunkuojiance_img2_gray_contours, lunkuojiance_img2_gray_hierarchy=cv2.findContours(lunkuojiance_img2_gray_thresh, cv2.RETR_TREE,cv2.CHAIN_APPROX_NONE)
cnt2=lunkuojiance_img2_gray_contours[3]
x, y, w,h=cv2. boundingRect(cnt2)
img=cv2.rectangle(lunkuojiance_img2_rgb, (x, y),(x+w, y+h),(200,200,255), 2)
cv2.imshow ('img',img)
cv2.waitKey(0)#显示多少秒,0表示无
cv2.destroyAllWindows()
area=cv2. contourArea (cnt2)
x, y, w,h=cv2. boundingRect(cnt2)
rect_area =w*h
extent = float (area)/ rect_area
print ('轮廓面积与边界矩形比',extent)
# cv2.boundingRect(cnt2) 是 OpenCV 中用于计算轮廓的边界框的方法。给定一个轮廓 cnt2,此函数会返回能够包围该轮廓的最小矩形边界框的位置和大小。具体来说:
# x: 边界框左上角的 x 坐标
# y: 边界框左上角的 y 坐标
# w: 边界框的宽度(width)
# h: 边界框的高度(height)
#**************************************************
#*****************************************************************