一、原理介绍
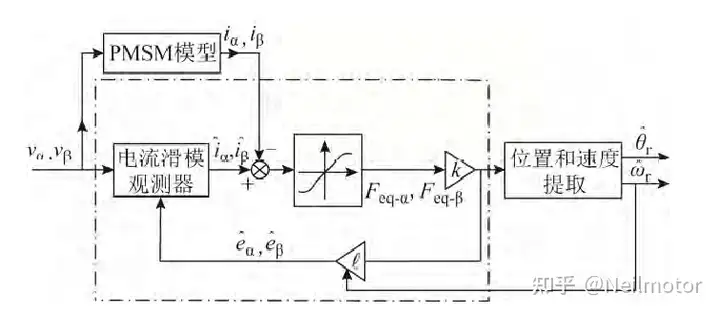
早期滑模观测器中的开关函数选用signum函数,考虑到signum函数的不连续性,需引入低通滤波器来平滑估计的反电动势信号,但由于低通滤波器引起系统相位延迟,故加入位置补偿。为削弱滑模的抖振性以及避免使用低通滤波器,引入连续的sigmoid函数代替signum函数,虽然该方法在削弱滑模抖振方面起到良好的效果,但其仍存在两个问题有待处理:①电机反电动势的大小随转子转速的变化而变化,在低转速工况下,电机反电动势较低,不足以用来准确估算转子位置;②在整个电机运行速度范围内,基于开关函数的切换增益需足够大以满足用于估计误差收敛的 Lyapunov稳定性条件,但过高的开关增益又会导致估计信号的抖振,特别是在低速范围内。
针对上述问题分析,采用一种改进滑模观测器,该观测器采用与电机转子电角速度相关的自适应反馈增益,引入幅值恒定的磁链分量计算电机转子位置,能够在相对较低的转速范围内提供良好的位置估计性能。
二、仿真模型
在MATLAB/simulink里面验证所提算法,搭建仿真。采用和实验中一致的控制周期1e-4,电机部分计算周期为1e-6。仿真模型如下所示:
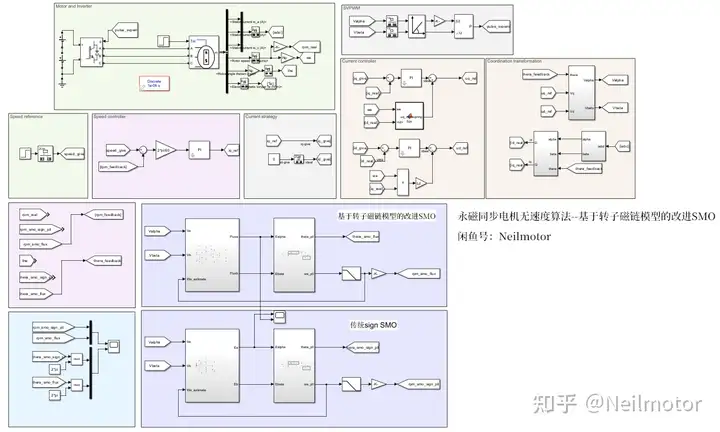
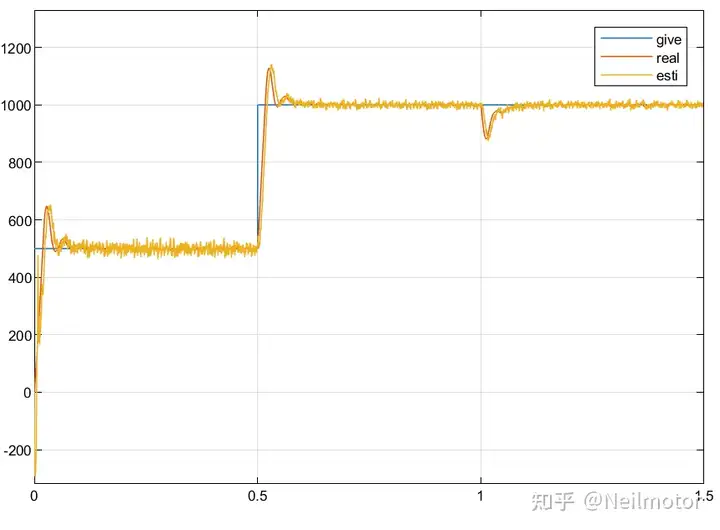
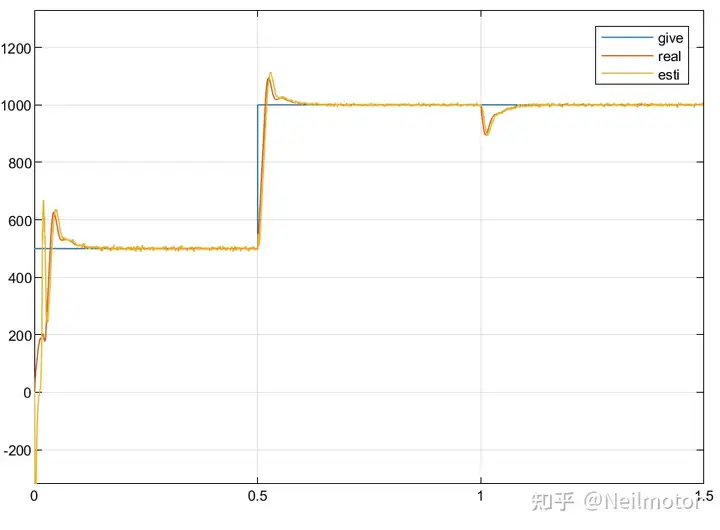
**仿真工况:**电机空载零速启动,0s给定转速阶跃至500rpm,0.5s给定转速阶跃至1000rpm,1s施加额定负载。
将传统SMO与基于转子磁链模型的改进SMO进行对比
2.1给定转速、实际转速和估计转速
2.2估计转速与实际转速误差
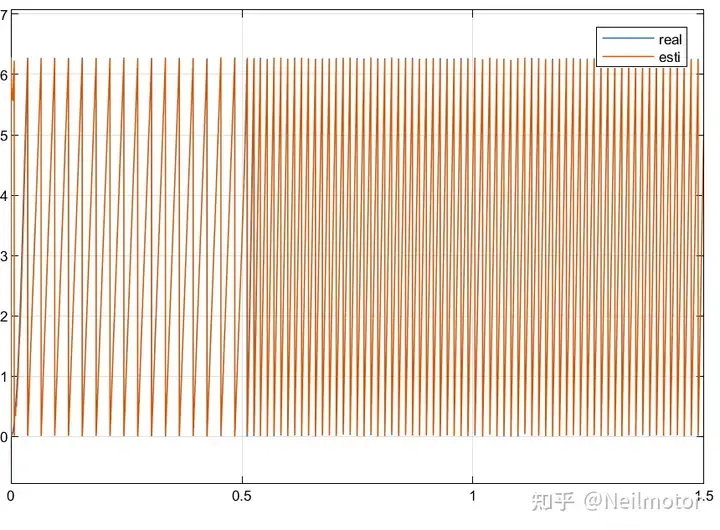
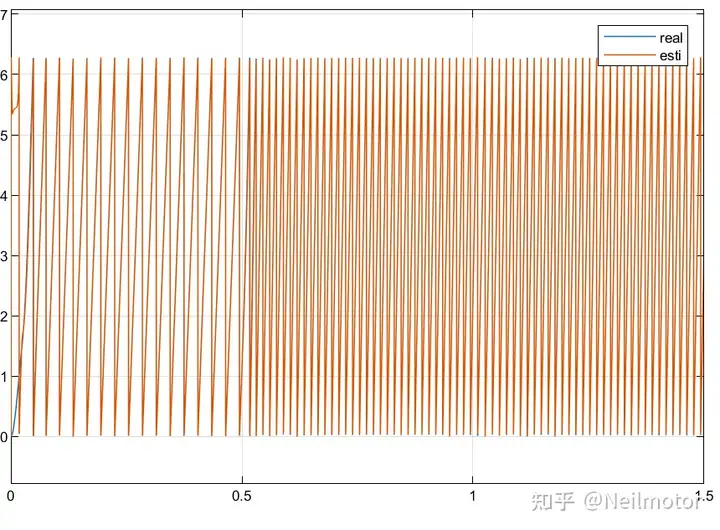
2.3估计转角与实际转角
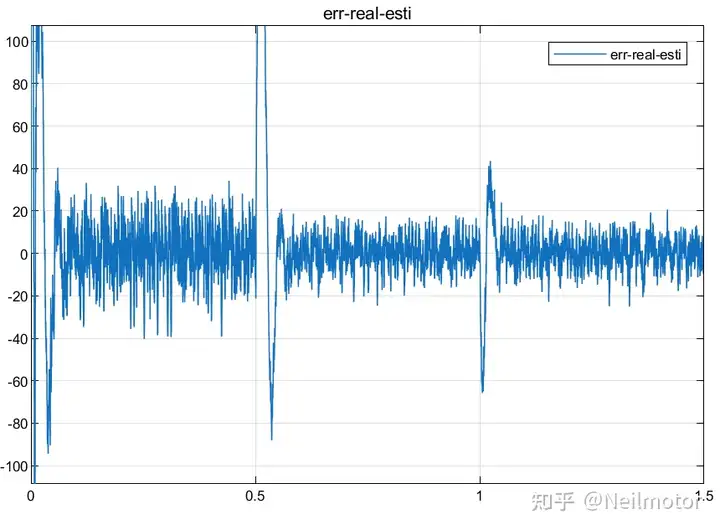
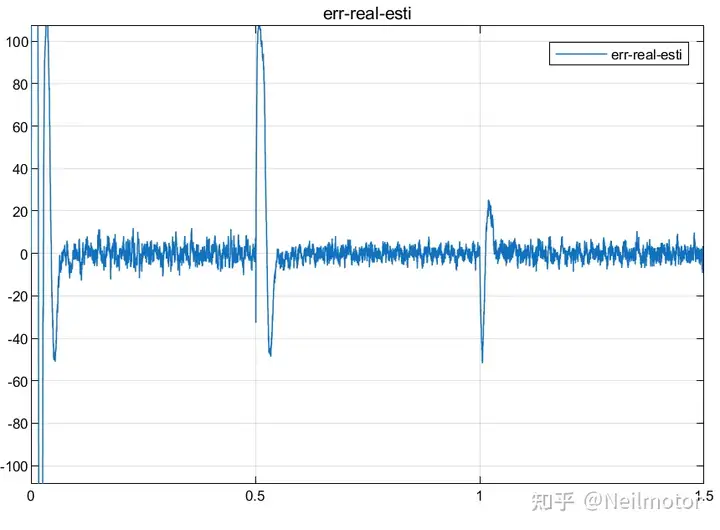
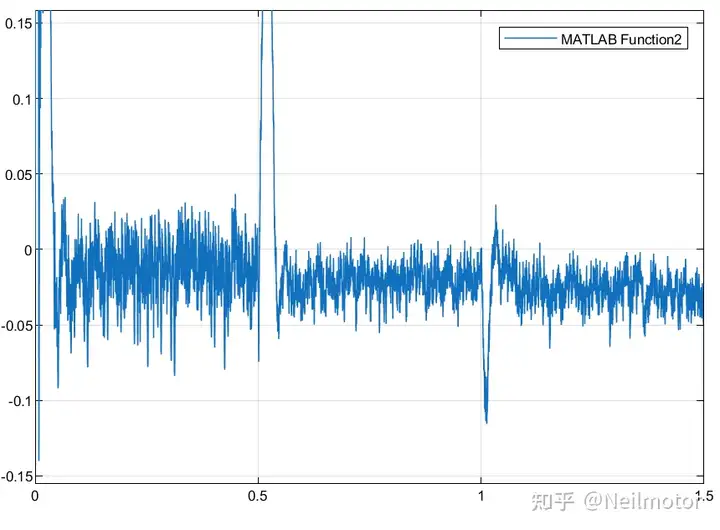
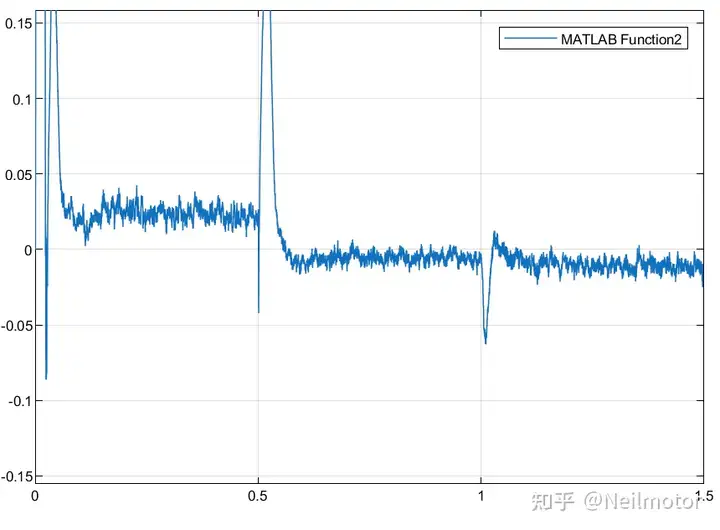
2.4估计转角与实际转角误差
2.5估计磁链与估计反电动势
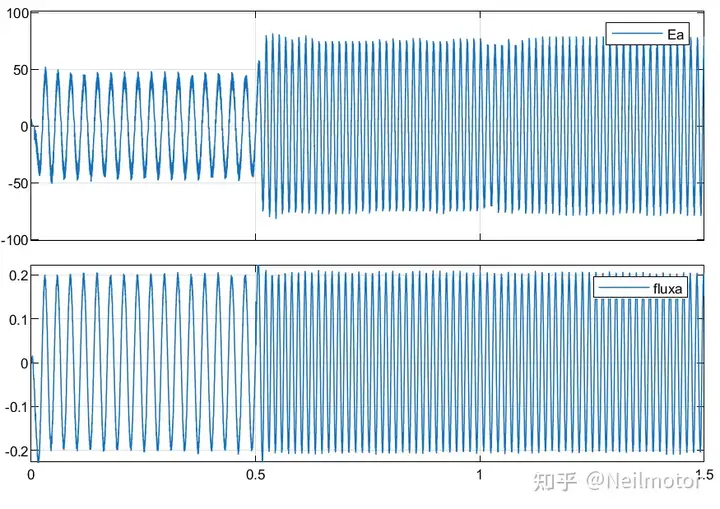
传统滑模观测器的性能响应曲线如图上半部分所示,由观测器估算得到的反电动势幅值相对于电机转速加速持续增长,并且反电动势估算值存在大量的噪声扰动,由此提取到的估计转子位置存在约较大的电角度误差,并且抖振现象严重。
改进滑模观测器中的Fα 观测值在电机起动之后幅值始终稳定在转子磁链0.21Wb附近,并且其观测值相对于传统滑模观测器较为平滑,噪声扰动小,由此提取得出的估计转子位置只存在较小的电角度误差,无明显抖振现象。
其中可以看到转角误差随转速会有轻微变化,这主要是由于滑模中滑模增益有限,在sigmod函数观测误差边界层内无法实现估计电流对实际电流的零误差跟踪,只能尽量缩小误差。
总的来说,改进滑模观测器采用与电机转子电角速度相关的自适应反馈增益,引入幅值恒定的磁链分量计算电机转子位置,避免电机转速大小变化影响转子位置估计精度