AUTOSAR MCU Driver 详解
基于AUTOSAR标准的微控制器驱动详解
目录
- 概述
1.1 模块功能范围
1.2 微控制器驱动在AUTOSAR中的位置 - MCU驱动架构
2.1 架构概览
2.2 与其他模块的关系 - 配置结构
3.1 配置类图
3.2 主要配置参数 - API接口
4.1 初始化与模式切换序列
4.2 主要API详解 - 状态管理
5.1 状态转换流程
5.2 低功耗模式管理 - 总结
1. 概述
1.1 模块功能范围
MCU Driver(微控制器驱动)是AUTOSAR基础软件中的一个关键模块,属于微控制器抽象层(MCAL)。该模块主要负责对微控制器硬件进行初始化和控制,为上层软件提供硬件无关的接口。
根据AUTOSAR规范,MCU Driver的主要功能包括:
- 微控制器初始化
- 时钟管理与配置
- 电源模式控制
- 复位原因识别
- RAM区段的初始化
MCU Driver在AUTOSAR软件架构中扮演着基础设施的角色,为整个软件栈提供硬件控制功能。
1.2 微控制器驱动在AUTOSAR中的位置
1.2.1 架构图解析
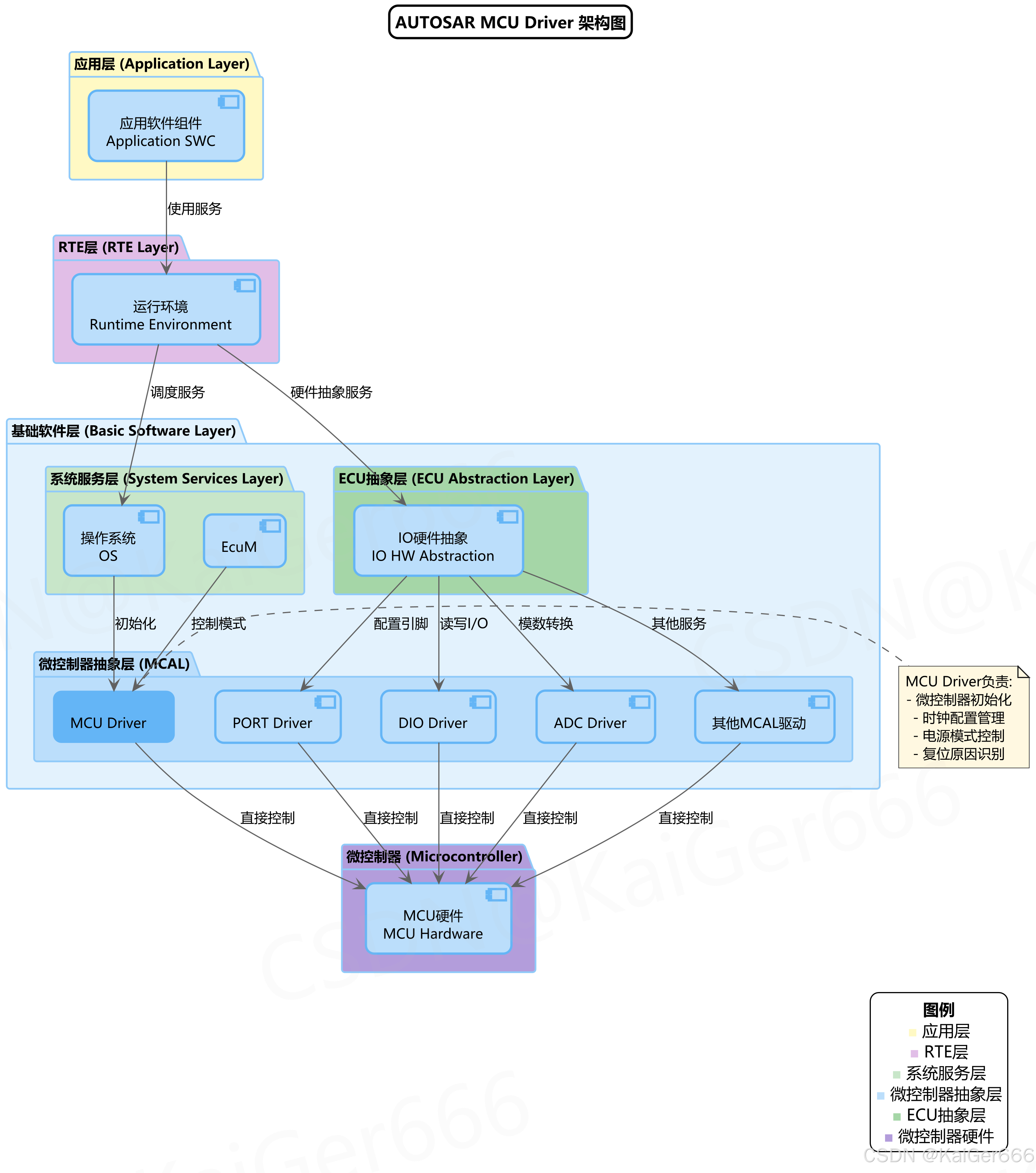
类 AUTOSAR架构图:
- 功能: 展示MCU Driver在AUTOSAR分层架构中的位置及与其他模块的关系
- 关键组件:
- 应用层: 包含应用软件组件(SWC),是功能实现的主要载体
- RTE层: 运行时环境,提供标准化的通信接口
- 基础软件层: 包含系统服务层、ECU抽象层和MCAL层
- MCU Driver: 位于MCAL层,直接与微控制器硬件交互
关系 应用层-RTE层:
- 应用软件组件通过RTE提供的标准接口访问底层服务,实现硬件无关性
关系 RTE层-系统服务层:
- RTE通过系统服务层中的OS(操作系统)进行任务调度和资源管理
关系 系统服务层-MCAL层:
- EcuM(ECU管理)模块负责控制MCU Driver的初始化和运行模式
- OS(操作系统)负责MCU Driver的调度和执行
关系 MCAL层-微控制器:
- MCU Driver直接控制微控制器硬件,实现底层初始化和模式控制
- 其他MCAL驱动(PORT、DIO、ADC等)也直接与硬件交互,各自负责不同的硬件控制功能
1.2.2 MCU Driver核心职责
MCU Driver作为MCAL层的基础驱动,具有以下核心职责:
c
/* MCU Driver初始化代码示例 */
void EcuM_Init(void)
{
/* 声明并初始化MCU配置 */
const Mcu_ConfigType* McuConfig = &Mcu_Configuration;
/* 调用MCU Driver初始化函数 */
Mcu_Init(McuConfig);
/* 获取并处理复位原因 */
Mcu_ResetType resetReason = Mcu_GetResetReason();
if (resetReason == MCU_POWER_ON_RESET) {
/* 上电复位的处理逻辑 */
} else if (resetReason == MCU_WATCHDOG_RESET) {
/* 看门狗复位的处理逻辑 */
}
/* 初始化时钟配置 */
Mcu_InitClock(MCU_CLOCK_SETTING_0);
/* 等待PLL锁定 */
while (Mcu_GetPllStatus() != MCU_PLL_LOCKED) {
/* 等待PLL锁定完成 */
}
/* 分配PLL时钟 */
Mcu_DistributePllClock();
/* 继续其他初始化... */
}MCU Driver在初始化阶段被系统管理模块(EcuM)首先调用,为后续的驱动和应用程序运行建立基础环境。
2. MCU驱动架构
2.1 架构概览
MCU Driver作为AUTOSAR软件架构中的基础组件,具有清晰的分层设计和标准化接口。它的架构设计遵循AUTOSAR的通用设计原则,包括:模块化、可配置性、可伸缩性和硬件抽象。
2.2 与其他模块的关系
MCU Driver与其他模块的交互关系包括:
-
上层依赖关系:
- EcuM (ECU管理)模块:控制MCU Driver的初始化和模式切换
- OS (操作系统):使用MCU Driver提供的时钟服务和中断控制
-
同层交互关系:
- PORT Driver:配合MCU Driver完成引脚初始化
- DIO Driver:使用MCU Driver提供的时钟和电源服务
- 其他MCAL驱动:依赖MCU Driver提供的基础服务
-
下层控制关系:
- 直接控制微控制器硬件,包括时钟系统、电源管理单元和复位控制器
3. 配置结构
3.1 配置类图

3.1.1 配置类图解析
类 Mcu_ConfigType:
- 功能: MCU Driver的主配置结构,包含所有子配置元素的指针和计数器
- 关键属性:
- ClockSettingConfig:
- 描述: 指向时钟设置配置的指针
- 类型: Mcu_ClockSettingConfig*
- 取值范围: 有效的配置结构指针
- 约束: 必须指向有效的时钟配置数组
- RamSectorSettingConfig:
- 描述: 指向RAM区段设置配置的指针
- 类型: Mcu_RamSectorSettingConfig*
- 取值范围: 有效的配置结构指针
- 约束: 必须指向有效的RAM区段配置数组
- ModeSettingConfig:
- 描述: 指向模式设置配置的指针
- 类型: Mcu_ModeSettingConfigType*
- 取值范围: 有效的配置结构指针
- 约束: 必须指向有效的模式配置数组
- McuNumberOfMcuModes:
- 描述: MCU模式的数量
- 类型: uint8
- 取值范围: 1-255
- 默认值: 1
- McuRamSectors:
- 描述: RAM区段的数量
- 类型: uint8
- 取值范围: 0-255
- 默认值: 0
- McuClockSettings:
- 描述: 时钟设置的数量
- 类型: uint8
- 取值范围: 1-255
- 默认值: 1
- ClockSettingConfig:
类 Mcu_ClockSettingConfig:
- 功能: 用于配置MCU的时钟,包括频率、分频和PLL配置
- 关键属性:
- McuClockReferencePointFrequency:
- 描述: 参考点频率,通常是晶振频率
- 类型: uint32
- 取值范围: 根据具体MCU而定
- McuClockPrescalerValue:
- 描述: 时钟预分频值
- 类型: float32
- 取值范围: 根据具体MCU而定
- McuClockDivisionFactors:
- 描述: 时钟分频因子
- 类型: uint8
- 取值范围: 根据具体MCU而定
- McuActivatePllClock:
- 描述: 是否激活PLL时钟
- 类型: boolean
- 取值范围: TRUE/FALSE
- 默认值: FALSE
- McuClockReferencePointFrequency:
类 Mcu_RamSectorSettingConfig:
- 功能: 用于配置MCU的RAM区域,包括基地址、大小和默认状态
- 关键属性:
- McuRamSectorBaseAddress:
- 描述: RAM区段的基地址
- 类型: uint32
- 取值范围: 有效的内存地址
- McuRamSectorId:
- 描述: RAM区段的ID
- 类型: uint8
- 取值范围: 0-255
- McuRamSectorSize:
- 描述: RAM区段的大小
- 类型: uint8
- 取值范围: 根据具体MCU而定
- McuRamSectorDefaultStatus:
- 描述: RAM区段的默认状态
- 类型: boolean
- 取值范围: TRUE/FALSE
- 默认值: FALSE
- McuRamSectorBaseAddress:
类 Mcu_ModeSettingConfigType:
- 功能: 用于配置MCU的运行模式,包括重置设置和唤醒使能
- 关键属性:
- McuMode:
- 描述: MCU模式
- 类型: uint8
- 取值范围: 根据具体MCU而定
- McuResetSetting:
- 描述: 复位设置
- 类型: uint8
- 取值范围: 根据具体MCU而定
- McuWakeupEnabled:
- 描述: 是否使能唤醒
- 类型: boolean
- 取值范围: TRUE/FALSE
- 默认值: FALSE
- McuMode:
3.1.2 配置代码示例
c
/* MCU Driver配置结构示例 */
#include "Mcu.h"
/* 时钟设置配置 */
const Mcu_ClockSettingConfig McuClockSettingConfig[MCU_CLOCK_SETTINGS_COUNT] = {
{
.McuClockReferencePointFrequency = 16000000U, /* 16MHz晶振 */
.McuClockPrescalerValue = 1.0f, /* 不分频 */
.McuClockDivisionFactors = 0U, /* 不分频 */
.McuActivatePllClock = TRUE /* 使用PLL */
},
{
.McuClockReferencePointFrequency = 16000000U, /* 16MHz晶振 */
.McuClockPrescalerValue = 2.0f, /* 二分频 */
.McuClockDivisionFactors = 1U, /* 额外分频 */
.McuActivatePllClock = FALSE /* 不使用PLL */
}
};
/* RAM区段设置配置 */
const Mcu_RamSectorSettingConfig McuRamSectorSettingConfig[MCU_RAM_SECTORS_COUNT] = {
{
.McuRamSectorBaseAddress = 0x20000000U, /* RAM起始地址 */
.McuRamSectorId = 0U, /* RAM区段ID */
.McuRamSectorSize = 64U, /* 64KB大小 */
.McuRamSectorDefaultStatus = TRUE /* 默认初始化 */
},
{
.McuRamSectorBaseAddress = 0x20010000U, /* 第二RAM区段地址 */
.McuRamSectorId = 1U, /* RAM区段ID */
.McuRamSectorSize = 32U, /* 32KB大小 */
.McuRamSectorDefaultStatus = FALSE /* 默认不初始化 */
}
};
/* 模式设置配置 */
const Mcu_ModeSettingConfigType McuModeSettingConfig[MCU_NUMBER_OF_MODES] = {
{
.McuMode = MCU_MODE_NORMAL, /* 正常运行模式 */
.McuResetSetting = 0U, /* 复位设置 */
.McuWakeupEnabled = TRUE /* 使能唤醒 */
},
{
.McuMode = MCU_MODE_SLEEP, /* 睡眠模式 */
.McuResetSetting = 0U, /* 复位设置 */
.McuWakeupEnabled = TRUE /* 使能唤醒 */
}
};
/* 主MCU配置结构 */
const Mcu_ConfigType Mcu_Configuration = {
.ClockSettingConfig = McuClockSettingConfig,
.RamSectorSettingConfig = McuRamSectorSettingConfig,
.ModeSettingConfig = McuModeSettingConfig,
.McuNumberOfMcuModes = MCU_NUMBER_OF_MODES,
.McuRamSectors = MCU_RAM_SECTORS_COUNT,
.McuClockSettings = MCU_CLOCK_SETTINGS_COUNT
};3.2 主要配置参数
MCU Driver的配置参数通常在项目的配置阶段由工具自动生成。主要配置参数包括:
-
时钟配置参数:
- 晶振频率设置
- PLL配置参数
- 时钟分频器设置
- 时钟源选择
-
RAM配置参数:
- RAM区段定义
- 区段大小设置
- 初始化状态配置
-
模式配置参数:
- 运行模式定义
- 低功耗模式设置
- 唤醒源配置
-
复位配置参数:
- 复位原因处理
- 复位后行为设置
4. API接口
4.1 初始化与模式切换序列
4.1.1 序列图解析
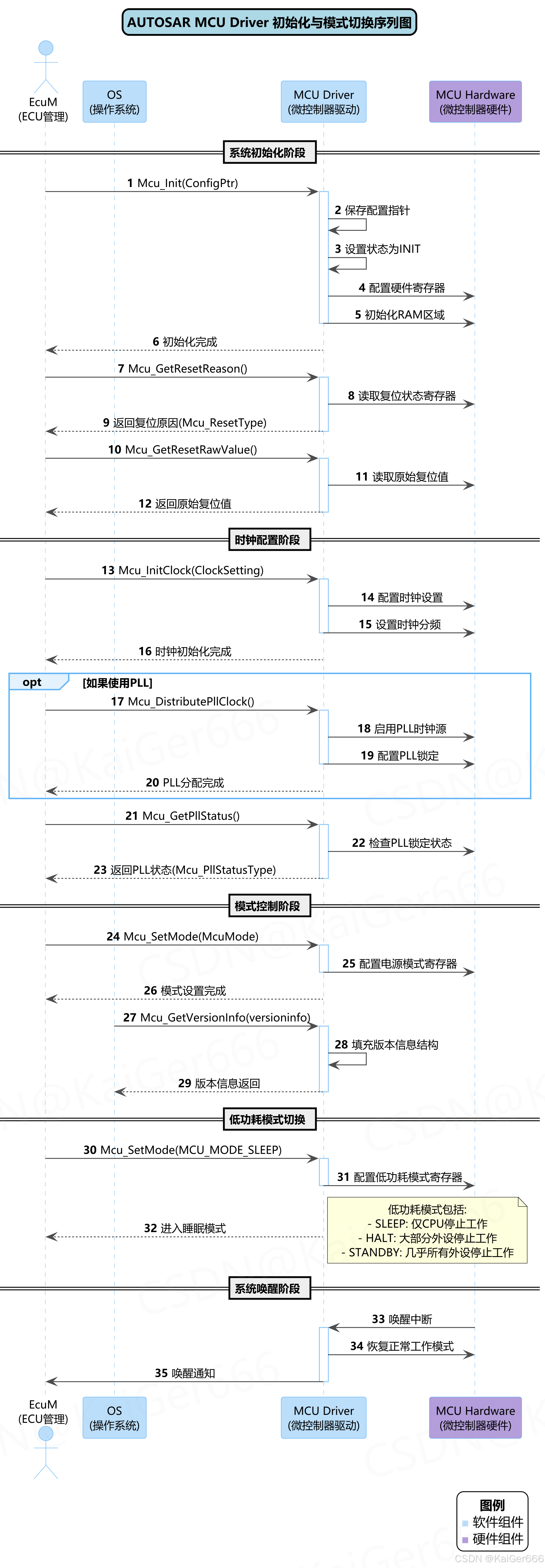
参与者 EcuM:
- 角色: ECU管理模块
- 职责:
- 控制系统初始化流程
- 管理电源模式切换
- 协调软件模块启动顺序
参与者 OS:
- 角色: 操作系统
- 职责:
- 提供任务调度功能
- 管理系统资源
- 处理中断和事件
参与者 MCU Driver:
- 角色: 微控制器驱动
- 职责:
- 初始化微控制器硬件
- 配置时钟系统
- 管理电源模式
- 识别复位原因
参与者 MCU Hardware:
- 角色: 微控制器硬件
- 职责:
- 执行物理层操作
- 提供寄存器接口
- 生成中断和事件
操作组 系统初始化阶段:
- 场景: 系统上电后的初始化过程
- 触发条件: 系统上电或复位后
函数 Mcu_Init:
- 描述: 初始化MCU驱动模块,设置内部状态变量并保存配置指针
- 参数:
- ConfigPtr 输入: 指向MCU驱动配置结构的指针, 类型: const Mcu_ConfigType*, 取值范围: 有效指针或NULL
- 返回值: 无
- 相关函数:
- 上层: EcuM_Init
- 下层: 硬件寄存器配置函数
- 并列: Mcu_GetResetReason, Mcu_GetResetRawValue
函数 Mcu_GetResetReason:
- 描述: 返回MCU复位的原因
- 参数: 无
- 返回值:
- MCU_POWER_ON_RESET: 上电复位
- MCU_WATCHDOG_RESET: 看门狗复位
- MCU_SW_RESET: 软件复位
- MCU_RESET_UNDEFINED: 未定义复位
- 相关函数:
- 上层: EcuM_Init
- 并列: Mcu_GetResetRawValue
操作组 时钟配置阶段:
- 场景: 配置系统时钟
- 触发条件: MCU初始化完成后
函数 Mcu_InitClock:
- 描述: 根据配置参数初始化MCU时钟
- 参数:
- ClockSetting 输入: 时钟配置的索引, 类型: Mcu_ClockType, 取值范围: 0 到 (Mcu_ClockSettings - 1)
- 返回值:
- E_OK: 时钟初始化成功
- E_NOT_OK: 时钟初始化失败
- 相关函数:
- 上层: EcuM_Init
- 下层: 硬件时钟配置函数
- 并列: Mcu_DistributePllClock, Mcu_GetPllStatus
函数 Mcu_DistributePllClock:
- 描述: 激活PLL时钟以供MCU和其他消费者使用
- 参数: 无
- 返回值:
- E_OK: PLL时钟分配成功
- E_NOT_OK: PLL时钟分配失败
- 相关函数:
- 上层: EcuM_Init
- 下层: PLL控制寄存器配置函数
- 并列: Mcu_GetPllStatus
函数 Mcu_GetPllStatus:
- 描述: 返回PLL锁定状态
- 参数: 无
- 返回值:
- MCU_PLL_LOCKED: PLL已锁定
- MCU_PLL_UNLOCKED: PLL未锁定
- MCU_PLL_STATUS_UNDEFINED: PLL状态未定义
- 相关函数:
- 上层: EcuM_Init
- 下层: PLL状态寄存器读取函数
- 并列: Mcu_DistributePllClock
操作组 模式控制阶段:
- 场景: 控制MCU运行模式
- 触发条件: 时钟配置完成后或系统需要改变运行模式时
函数 Mcu_SetMode:
- 描述: 设置MCU的运行模式
- 参数:
- McuMode 输入: 目标模式, 类型: Mcu_ModeType, 取值范围: 由配置决定
- 返回值: 无
- 相关函数:
- 上层: EcuM_SetMcuMode
- 下层: 模式控制寄存器配置函数
函数 Mcu_GetVersionInfo:
- 描述: 返回MCU驱动的版本信息
- 参数:
- versioninfo 输出: 版本信息结构指针, 类型: Std_VersionInfoType*, 取值范围: 有效指针
- 返回值: 无
- 相关函数:
- 上层: 任何需要版本信息的函数
4.1.2 初始化代码示例
c
/* MCU Driver初始化和使用示例 */
#include "Mcu.h"
#include "EcuM.h"
void EcuM_StartupTwo(void)
{
Std_ReturnType ret;
/* 步骤1: 初始化MCU驱动 */
Mcu_Init(&Mcu_Configuration);
/* 步骤2: 检查复位原因 */
Mcu_ResetType resetReason = Mcu_GetResetReason();
uint32 resetRawValue = Mcu_GetResetRawValue();
/* 根据复位原因执行不同操作 */
if (resetReason == MCU_POWER_ON_RESET) {
/* 上电复位处理 */
EcuM_HandlePowerOnReset();
} else if (resetReason == MCU_WATCHDOG_RESET) {
/* 看门狗复位处理 */
EcuM_HandleWatchdogReset();
}
/* 步骤3: 初始化时钟 */
ret = Mcu_InitClock(MCU_CLOCK_SETTING_0);
if (ret != E_OK) {
/* 时钟初始化失败处理 */
EcuM_HandleClockInitError();
return;
}
/* 步骤4: 等待PLL锁定 */
while (Mcu_GetPllStatus() != MCU_PLL_LOCKED) {
/* 超时处理可在此添加 */
}
/* 步骤5: 分配PLL时钟 */
ret = Mcu_DistributePllClock();
if (ret != E_OK) {
/* PLL分配失败处理 */
EcuM_HandlePllDistributionError();
return;
}
/* 步骤6: 设置正常运行模式 */
Mcu_SetMode(MCU_MODE_NORMAL);
/* 继续其他初始化... */
}
/* 低功耗模式切换示例 */
void EcuM_GoToSleep(void)
{
/* 通知所有模块即将进入睡眠模式 */
EcuM_NotifyGoToSleep();
/* 设置MCU为睡眠模式 */
Mcu_SetMode(MCU_MODE_SLEEP);
/* 此处MCU进入睡眠,直到被唤醒 */
/* 唤醒后执行... */
EcuM_NotifyWakeup();
}4.2 主要API详解
MCU Driver提供的主要API可以分为以下几类:
-
初始化API:
Mcu_Init(): 初始化MCU驱动Mcu_InitRamSection(): 初始化指定的RAM区段
-
时钟管理API:
Mcu_InitClock(): 初始化MCU时钟Mcu_DistributePllClock(): 分配PLL时钟Mcu_GetPllStatus(): 获取PLL锁定状态
-
模式管理API:
Mcu_SetMode(): 设置MCU运行模式Mcu_GetModeStatus(): 获取当前模式状态
-
复位管理API:
Mcu_GetResetReason(): 获取复位原因Mcu_GetResetRawValue(): 获取原始复位值Mcu_PerformReset(): 执行MCU复位
-
其他API:
Mcu_GetVersionInfo(): 获取版本信息
5. 状态管理
5.1 状态转换流程
5.1.1 状态图解析
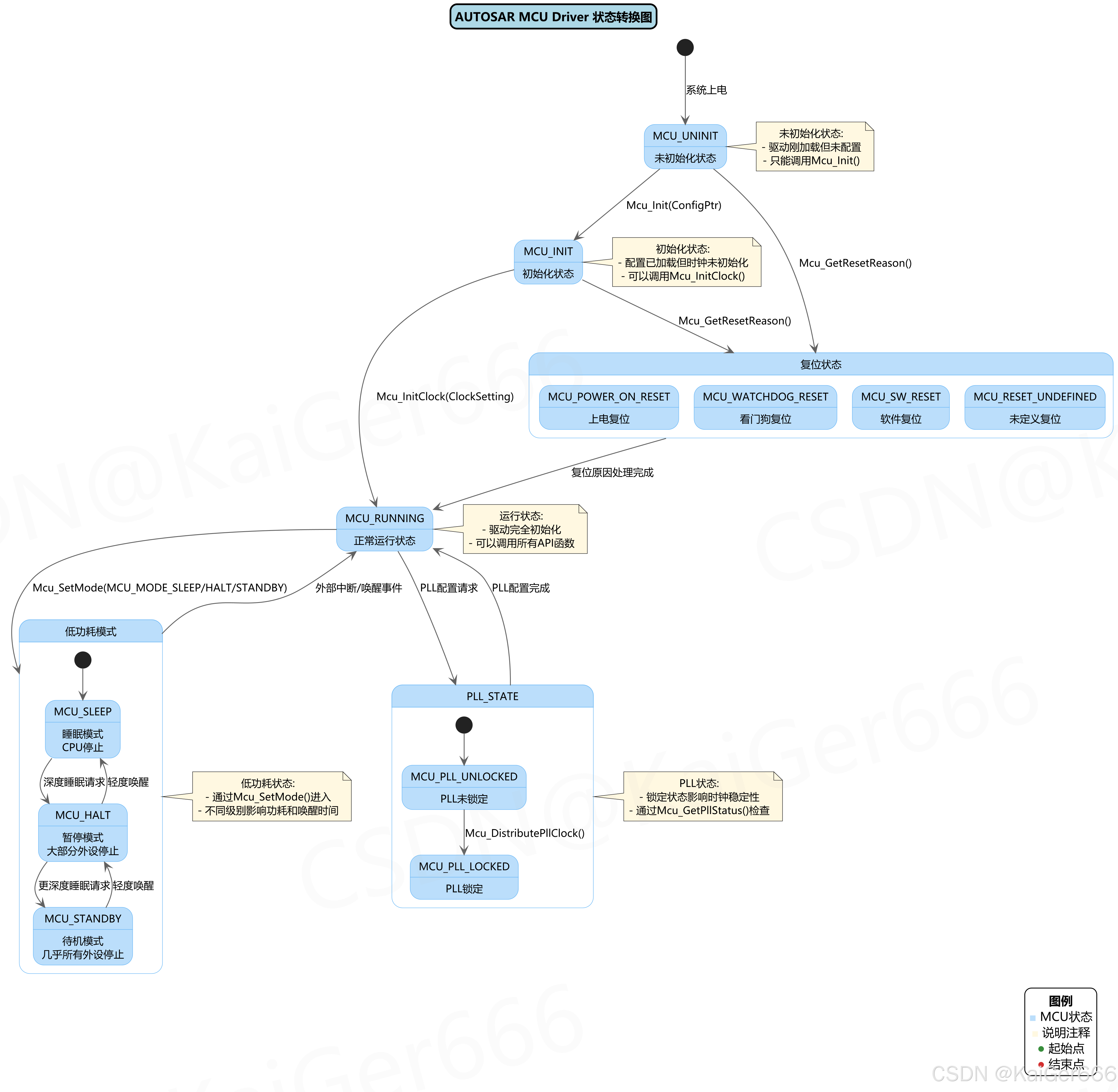
状态 MCU_UNINIT:
- 描述: MCU驱动未初始化状态
- 进入条件: 系统上电或驱动加载后
- 行为限制: 只能调用Mcu_Init()函数
- 退出转换: 调用Mcu_Init()后转到MCU_INIT状态
状态 MCU_INIT:
- 描述: MCU驱动已初始化但时钟未配置状态
- 进入条件: 调用Mcu_Init()后
- 行为限制: 可以调用除Mcu_Init()外的函数
- 退出转换: 调用Mcu_InitClock()后转到MCU_RUNNING状态
状态 MCU_RUNNING:
- 描述: MCU驱动完全初始化并运行状态
- 进入条件: 调用Mcu_InitClock()后
- 行为限制: 可以调用所有API函数
- 退出转换:
- 调用Mcu_SetMode()后转到低功耗模式
- 系统复位后转到MCU_UNINIT状态
状态组 低功耗模式:
- 子状态:
- MCU_SLEEP: CPU停止工作但外设继续运行
- MCU_HALT: 大部分外设停止工作
- MCU_STANDBY: 几乎所有外设停止工作
- 进入条件: 调用Mcu_SetMode()设置低功耗模式
- 退出条件: 外部中断或唤醒事件发生
状态组 PLL_STATE:
- 子状态:
- MCU_PLL_UNLOCKED: PLL未锁定状态
- MCU_PLL_LOCKED: PLL锁定状态
- 进入条件: 配置PLL时钟
- 转换条件: 调用Mcu_DistributePllClock()后从UNLOCKED转到LOCKED
状态组 复位状态:
- 子状态:
- MCU_POWER_ON_RESET: 上电复位状态
- MCU_WATCHDOG_RESET: 看门狗复位状态
- MCU_SW_RESET: 软件复位状态
- MCU_RESET_UNDEFINED: 未定义复位状态
- 检查方法: 调用Mcu_GetResetReason()获取当前复位原因
5.1.2 状态管理代码示例
c
/* MCU Driver状态管理示例 */
#include "Mcu.h"
#include "EcuM.h"
/* 根据复位原因执行相应操作 */
void HandleMcuReset(void)
{
Mcu_ResetType resetReason;
/* 获取复位原因 */
resetReason = Mcu_GetResetReason();
switch (resetReason) {
case MCU_POWER_ON_RESET:
/* 上电复位处理 */
PerformPowerOnRecovery();
break;
case MCU_WATCHDOG_RESET:
/* 看门狗复位处理 */
PerformWatchdogRecovery();
/* 记录看门狗复位事件 */
LogWatchdogReset();
break;
case MCU_SW_RESET:
/* 软件复位处理 */
PerformSoftwareResetRecovery();
break;
case MCU_RESET_UNDEFINED:
default:
/* 未知复位处理 */
PerformUnknownResetRecovery();
break;
}
}
/* 低功耗模式管理 */
void ManagePowerModes(uint8 targetMode)
{
switch (targetMode) {
case POWER_MODE_NORMAL:
/* 设置正常运行模式 */
Mcu_SetMode(MCU_MODE_NORMAL);
break;
case POWER_MODE_LOW:
/* 设置低功耗模式 */
PrepareForLowPower(); /* 准备进入低功耗模式 */
Mcu_SetMode(MCU_MODE_SLEEP);
break;
case POWER_MODE_ULTRA_LOW:
/* 设置超低功耗模式 */
PrepareForUltraLowPower(); /* 准备进入超低功耗模式 */
Mcu_SetMode(MCU_MODE_STANDBY);
break;
default:
/* 无效模式处理 */
ReportInvalidPowerMode(targetMode);
break;
}
}5.2 低功耗模式管理
MCU Driver提供的低功耗模式管理功能是现代汽车电子系统节能的重要组成部分。不同的低功耗模式具有不同的特点:
-
睡眠模式(SLEEP):
- 仅CPU停止工作,外设继续运行
- 唤醒时间短,适合短时间休眠
- 功耗降低幅度有限
-
暂停模式(HALT):
- 大部分外设停止工作,保留少量唤醒源
- 唤醒时间中等,适合中等时间休眠
- 功耗降低幅度较大
-
待机模式(STANDBY):
- 几乎所有外设停止工作,只保留关键唤醒源
- 唤醒时间长,适合长时间休眠
- 功耗降低幅度最大
正确管理这些模式可以在保证系统响应性的同时最大限度降低功耗。
6. 总结
AUTOSAR MCU Driver作为MCAL层的核心模块,为AUTOSAR软件架构提供了基础的硬件抽象和控制功能。通过标准化的接口和配置结构,它实现了以下关键功能:
-
硬件抽象:
- 提供硬件无关的接口,简化上层软件开发
- 实现不同微控制器平台的统一访问方式
-
系统初始化:
- 负责微控制器初始化和配置
- 管理系统时钟和RAM区段初始化
-
电源管理:
- 提供多种低功耗模式支持
- 实现电源状态转换和管理
-
复位控制:
- 识别系统复位原因
- 提供复位信息和控制功能
MCU Driver的正确配置和使用对整个AUTOSAR系统的性能、功耗和可靠性有着重要影响。通过本文的详细解析,我们了解了MCU Driver的架构设计、配置结构、API接口和状态管理,为AUTOSAR系统开发提供了重要参考。