目录
- 一、CAN总线简介
- [1.1 背景](#1.1 背景)
- [1.2 节点构成](#1.2 节点构成)
- 二、CAN总线基本工作原理
- [2.1 物理层](#2.1 物理层)
- [2.2 数据链路层](#2.2 数据链路层)
- 三、CAN总线的报文格式
- [3.1 数据帧 + 远程帧(标准帧------11位ID)](#3.1 数据帧 + 远程帧(标准帧——11位ID))
- [3.2 数据帧 + 远程帧(扩展帧------29位ID)](#3.2 数据帧 + 远程帧(扩展帧——29位ID))
- [3.3 错误帧](#3.3 错误帧)
- [3.4 过载帧](#3.4 过载帧)
- 四、仲裁机制
- 五、错误机制
一、CAN总线简介
1.1 背景
CAN(Controller Area Network)指的是控制器局域网,德国Bosch公司开发CAN总线的最初目的是解决汽车上数量众多的电子设备之间的通信问题,减少电子设备之间复杂的信号线,于是设计了一个单一的网络总线,使所有外围器件可以被挂接在该总线上。
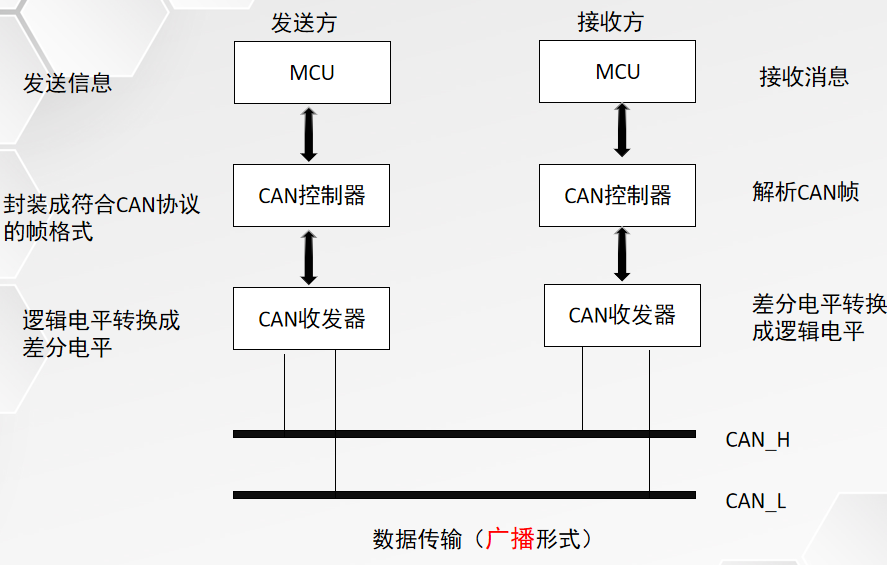
1.2 节点构成
CAN控制器:用于将欲收发的信息转换为符合CAN规范的CAN帧,通过CAN收发器,在CAN总线上交换信息。
CAN收发器:将CAN控制器的逻辑电平转换为CAN总线的差分电平,在两条有差分电压的总线电缆上传输数据。
二、CAN总线基本工作原理
CAN总线定义了两层:物理层和数据链路层。
2.1 物理层
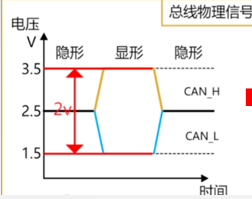
CAN总线中规定的逻辑电平:0为显性,1为隐性。但实际传输过程中用的是经过CAN收发器转换的差分电平。何谓差分电平,就是通过CAN_H和CAN_L的电压差进行传输,不是像UART那样依赖单根线的绝对电压。这种设计赋予CAN强大的抗干扰能力及长距离通信能力。
CAN_H和CAN_L静态时均是2.5v左右(电压差为0),表示隐性;当CAN_H > CAN_L时(电压差为2.5v),表示显性。
2.2 数据链路层
数据链路层主要规定了传输的帧结构,CAN一共定义了四种帧类型:
- 数据帧:从发送节点向其他节点发送的数据信息;
- 远程帧:向其他节点请求发送具有同一识别符的数据帧;
- 错误帧:检测到总线错误,发送错误帧;
- 过载帧:用于在数据帧或远程帧之间提供附加的延时;
三、CAN总线的报文格式
3.1 数据帧 + 远程帧(标准帧------11位ID)
- 帧起始:一个显性位;
- 仲裁域:ID值(11bit)+RTR(1bit,显性为数据帧,隐性为远程帧);
- 控制段:IDE(1bit,标准帧为显性)+保留位(1bit,隐性)+DLC(4bit,决定了数据段的长度);
- 数据段:0~8bit(远程帧无数据段);
- CRC段:CRC值(15bit)+界定符(1bit,隐性);
- ACK段:ACK槽(1bit)+界定符(1bit,隐性);
- 帧结束:7个连续的隐性位;
3.2 数据帧 + 远程帧(扩展帧------29位ID)
- 帧起始:一个显性位;
- 仲裁域:ID值(11bit)+SRR(1bit,隐性)+IDE(1bit,扩展帧为隐性)+ID值(18bit)+RTR(1bit,显性为数据帧,隐性为远程帧);
- 控制段:保留位(2bit,隐性)+DLC(4bit,决定了数据段的长度);
- 数据段:0~8bit(远程帧无数据段);
- CRC段:CRC值(15bit)+界定符(1bit,隐性);
- ACK段:ACK槽(1bit)+界定符(1bit,隐性);
- 帧结束:7个连续的隐性位;
3.3 错误帧
- 主动错误:错误标志(6bit,显性)+错误界定符(8bit,隐性);
- 被动错误:错误标志(6bit,隐性)+错误界定符(8bit,隐性);
3.4 过载帧
- 过载标志(6bit,显性)+过载界定符(8bit,隐性);
四、仲裁机制
(CAN的仲裁机制可以结合IIC仲裁机制一起学习)因为CAN是多主式结构,为了避免发生冲突,当多个节点同时想发送信息,就通过逐位比较仲裁段的ID值来判断哪一个节点可以获取抢占权。CAN的仲裁机制总结成一句话就是:逐位比较ID值,显性优先级>隐性优先级。具体便是通过线与逻辑来实现的。
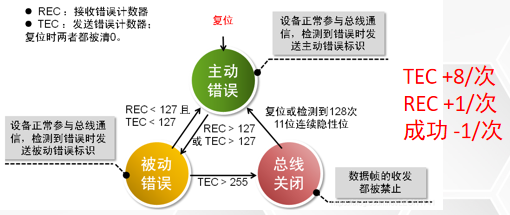
五、错误机制
为了防止自身由于某些原因导致无法正常接收的节点一直发送错误帧,干扰其他节点通信,CAN总线规定了节点的3种状态/行为。本质就是通过接收错误计数器和发送错误计数器的值来进行切换状态。状态切换图及计数器计数规则如下图所示。