深度学习(鱼书)day09--与学习相关的技巧(前三节)
一、参数的更新
神经网络的学习的目的是找到使损失函数的值尽可能小的参数 。这是寻找最优参数的问题,解决这个问题的过程称为最优化(optimization) 。神经网络的最优化问题非常难,它的参数空间非常复杂,无法轻易找到最优解。在深度神经网络中 ,参数的数量非常庞大,导致最优化问题更加复杂。
为了找到最优参数,我们使用了随机梯度下降法(stochastic gradient descent),简称SGD。但是,根据不同的问题,也存在比SGD更加聪明的方法。
-
探险家的故事
有一个性情古怪的探险家。他在广袤的干旱地带旅行,坚持寻找幽深的山谷。他的目标是要到达最深的谷底 (他称之为"至深之地")。这也是他旅行的目的。并且,他给自己制定了两个严格的"规定":一个是不看地图;另一个是把眼睛蒙上。因此,他并不知道最深的谷底在这个广袤的大地的何处,而且什么也看不见。在这么严苛的条件下,这位探险家如何前往"至深之地"呢?他要如何迈步,才能迅速找到"至深之地"呢?
寻找最优参数时,我们所处的状况和这位探险家一样,是一个漆黑的世界。在这么困难的状况下,地面的坡度显得尤为重要 。探险家虽然看不到周围的情况,但是能够知道当前所在位置的坡度(通过脚底感受地面的倾斜状况) 。于是,朝着当前所在位置的坡度最大的方向前进,就是SGD的策略。
-
SGD
用数学式可以将SGD写成如下的式:

SGD是朝着梯度方向只前进一定距离的简单方法。现在,我们将SGD实现为一个Python类:
python
class SGD:
def __init__(self, lr=0.01):
self.lr = lr
def update(self, params, grads):
for key in params.keys():
params[key] -= self.lr * grads[key]使用这个SGD类,可以按如下方式进行神经网络的参数的更新:(伪代码)
python
network = TwoLayerNet(...)
optimizer = SGD()
for i in range(10000):
...
x_batch, t_batch = get_mini_batch(...) # mini-batch
grads = network.gradient(x_batch, t_batch)
params = network.params
optimizer.update(params, grads)
...optimizer 表示"进行最优化的人"的意思,这里由SGD承担这个角色。参数的更新由optimizer负责完成。我们在这里需要做的只是将参数和梯度的信息传给optimizer。
很多深度学习框架都实现了各种最优化方法,并且提供了可以简单切换这些方法的构造。用户可以从中选择自己想用的最优化方法。
-
SGD的缺点
虽然SGD简单,并且容易实现,但是在解决某些问题时可能没有效率。我们来思考一下求下面这个函数的最小值的问题。
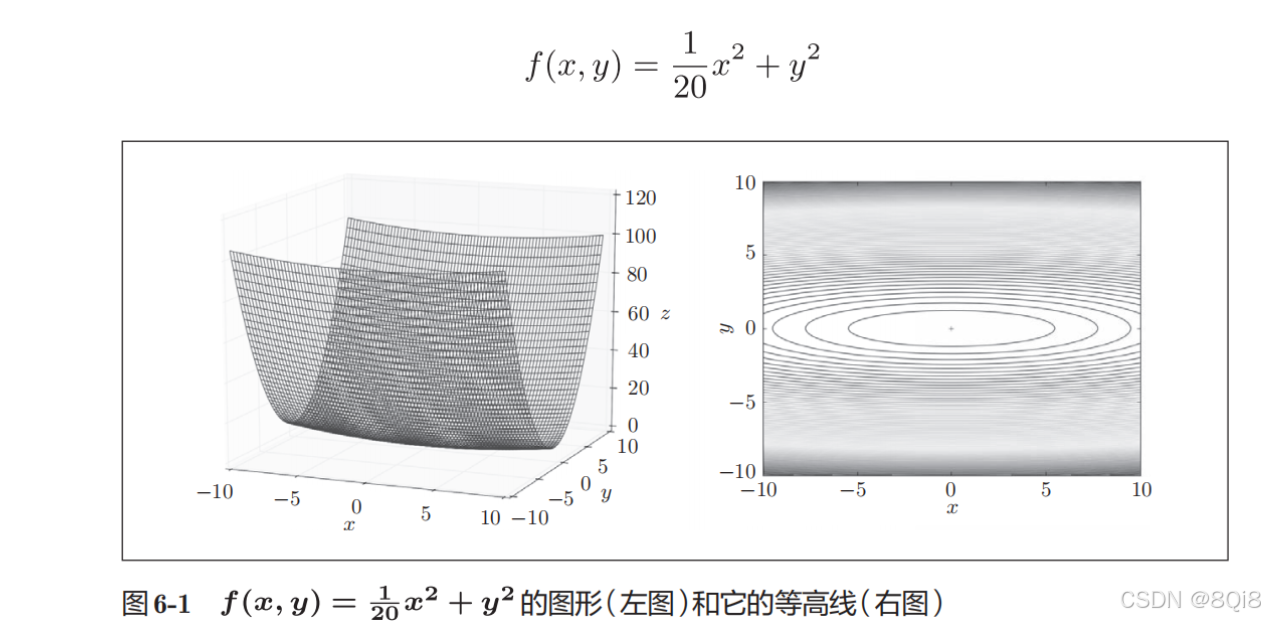
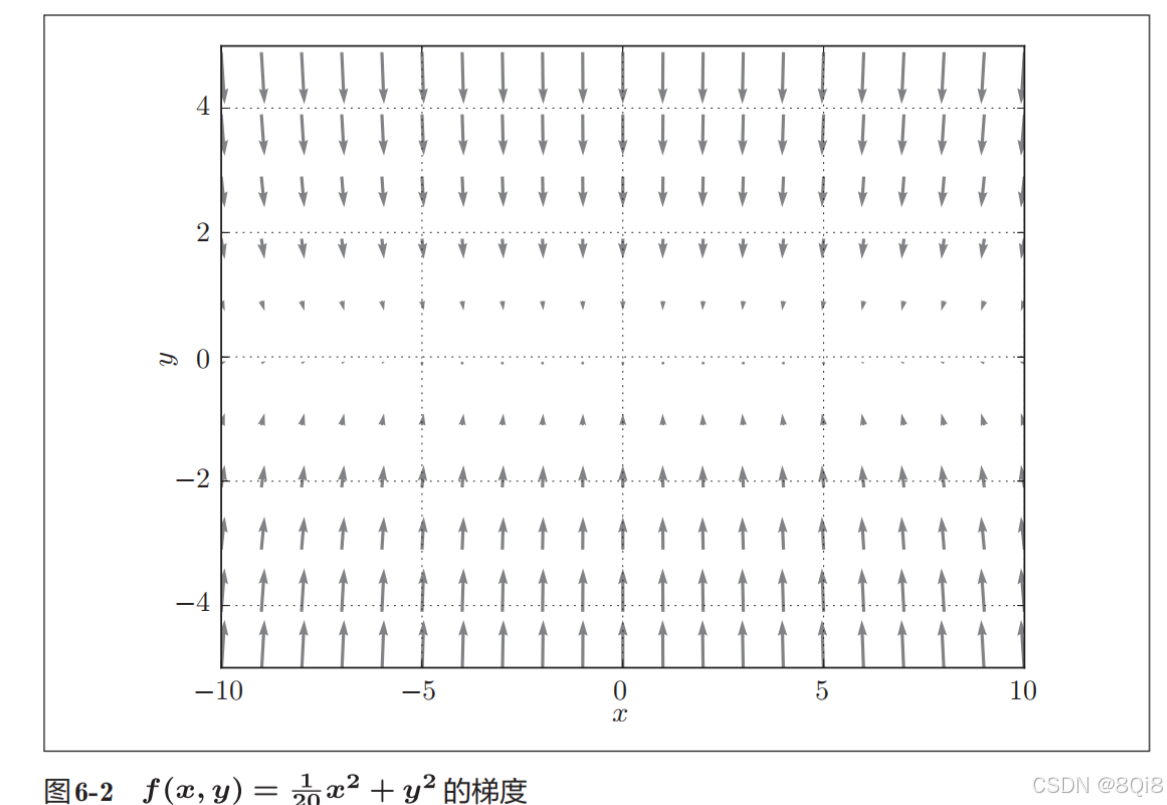
这个梯度的特征是,y轴方向上大,x轴方向上小。换句话说,就是y轴方向的坡度大,而x轴方向的坡度小。虽然式子的最小值在(x, y) = (0, 0)处,但是图6-2中的梯度在很多地方并没有指向(0, 0)。
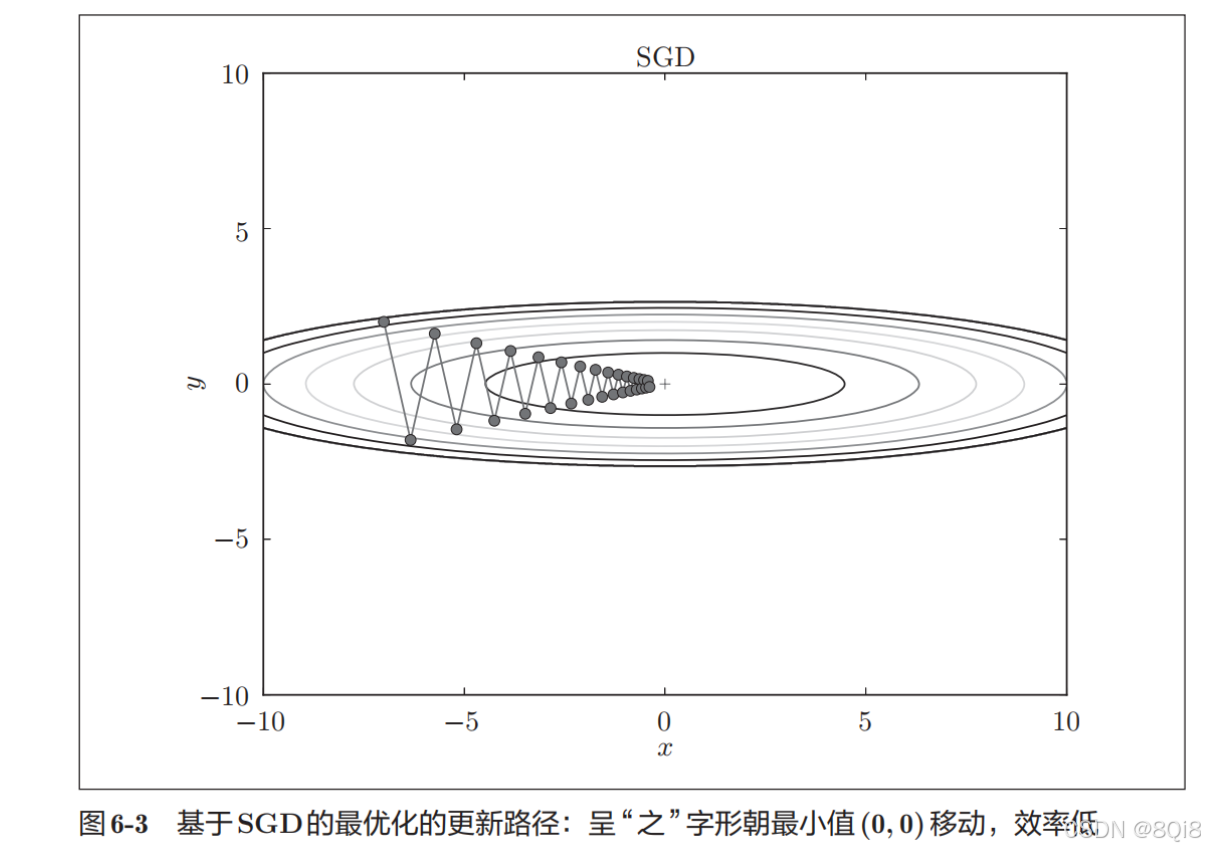
我们来尝试对图6-1这种形状的函数应用SGD。从 (x, y) = (−7.0, 2.0) 处(初始值)开始搜索。SGD呈"之"字形移动。这是一个相当低效的路径。也就是说,SGD的缺点是,如果函数的形状非均向(anisotropic),比如呈延伸状,搜索的路径就会非常低效。
为了改正SGD 的缺点,下面我们将介绍Momentum、AdaGrad、Adam 这3种方法来取代SGD。
-
Momentum
Momentum是"动量"的意思,和物理有关。用数学式表示Momentum方法,如下所示。

这里新出现了一个变量v ,对应物理上的速度。表示了物体在梯度方向上受力,在这个力的作用下,物体的速度增加这一物理法则。如图6-4所示,Momentum方法给人的感觉就像是小球在地面上滚动。
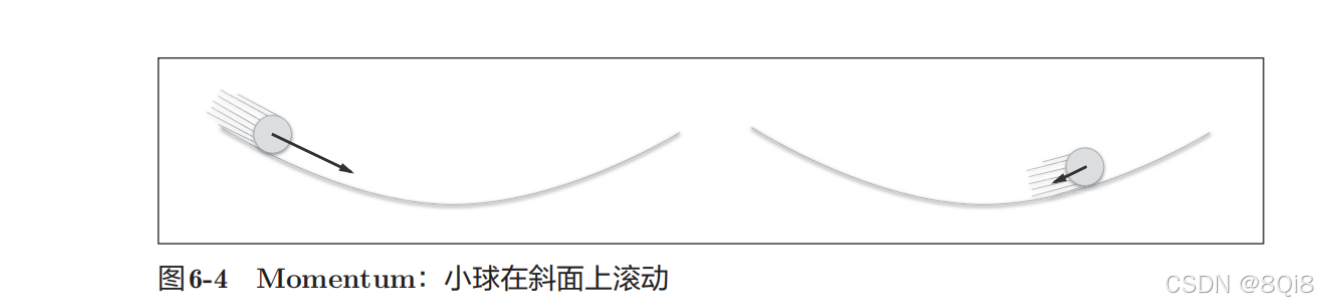
式(6.3)中有αv这一项。在物体不受任何力时,该项承担使物体逐渐减速的任务(α设定为0.9之类的值),对应物理上的地面摩擦或空气阻力。下面是Momentum的代码实现
python
class Momentum:
def __init__(self, lr=0.01, momentum=0.9):
self.lr = lr
self.momentum = momentum
self.v = None
def update(self, params, grads):
if self.v is None:
self.v = {}
for key, val in params.items():
self.v[key] = np.zeros_like(val)
for key in params.keys():
self.v[key] = self.momentum*self.v[key] - self.lr*grads[key]
params[key] += self.v[key]实例变量v会保存物体的速度。初始化时,v中什么都不保存,但当第一次调用update()时,v会以字典型变量的形式保存与参数结构相同的数据。
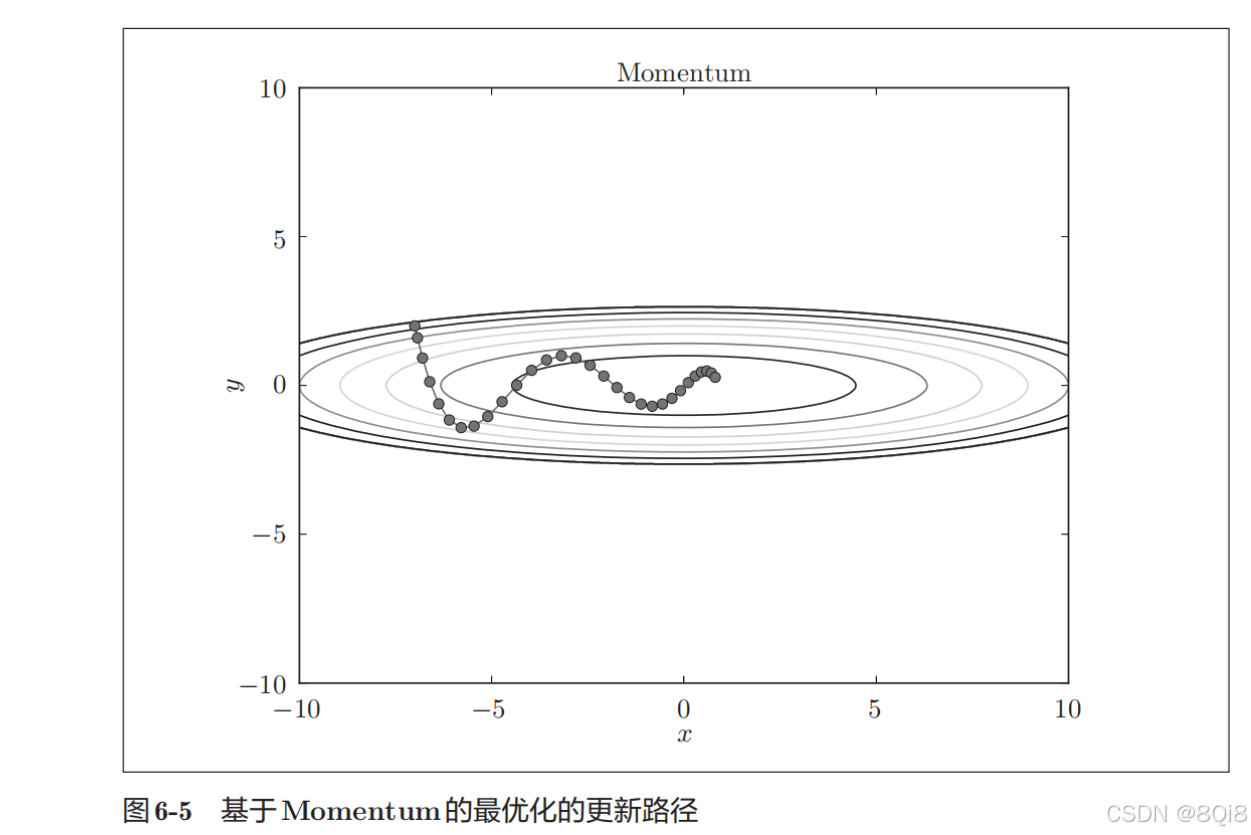
和SGD相比,我们发现 "之"字形的"程度"减轻了 。这是因为虽然x轴方向上受到的力非常小,但是一直在同一方向上受力,所以朝同一个方向会有一定的加速。反过来,虽然y轴方向上受到的力很大,但是因为交互地受到正方向和反方向的力,它们会互相抵消,所以y轴方向上的速度不稳定。因此,和SGD时的情形相比,可以更快地朝x轴方向靠近,减弱"之"字形的变动程度。
-
AdaGrad
在关于学习率的有效技巧中,有一种被称为学习率衰减(learning rate decay)的方法 ,即随着学习的进行,使学习率逐渐减小。实际上,一开始"多"学,然后逐渐"少"学的方法 ,在神经网络的学习中经常被使用。AdaGrad 进一步发展了这个想法,针对"一个一个"的参数,赋予其"定制"的值。
AdaGrad会为参数的每个元素适当地调整学习率,与此同时进行学习,数学式子:

这里新出现了变量h ,如式(6.5)所示,它保存了以前的所有梯度值的平方和。在更新参数时,通过乘以 
,就可以调整学习的尺度。这意味着,参数的元素中变动较大(被大幅更新)的元素的学习率将变小。也就是说,可以按参数的元素进行学习率衰减,使变动大的参数的学习率逐渐减小。
AdaGrad会记录过去所有梯度的平方和。学习越深入,更新的幅度就越小。如果无止境地学习,更新量就会变为 0 ,完全不再更新。为了改善这个问题,可以使用 RMSProp方法。RMSProp方法逐渐地遗忘过去的梯度,在做加法运算时将新梯度的信息更多地反映出来。这种操作从专业上讲,称为"指数移动平均",呈指数函数式地减小过去的梯度的尺度。
python
class AdaGrad:
def __init__(self, lr=0.01):
self.lr = lr
self.h = None
def update(self, params, grads):
if self.h is None:
self.h = {}
for key, val in params.items():
self.h[key] = np.zeros_like(val)
for key in params.keys():
self.h[key] += grads[key] * grads[key]
params[key] -= self.lr * grads[key] / (np.sqrt(self.h[key]) + 1e-7)
python
class RMSprop:
def __init__(self, lr=0.01, decay_rate = 0.99):
self.lr = lr
self.decay_rate = decay_rate
self.h = None
def update(self, params, grads):
if self.h is None:
self.h = {}
for key, val in params.items():
self.h[key] = np.zeros_like(val)
for key in params.keys():
self.h[key] *= self.decay_rate
self.h[key] += (1 - self.decay_rate) * grads[key] * grads[key]
params[key] -= self.lr * grads[key] / (np.sqrt(self.h[key]) + 1e-7)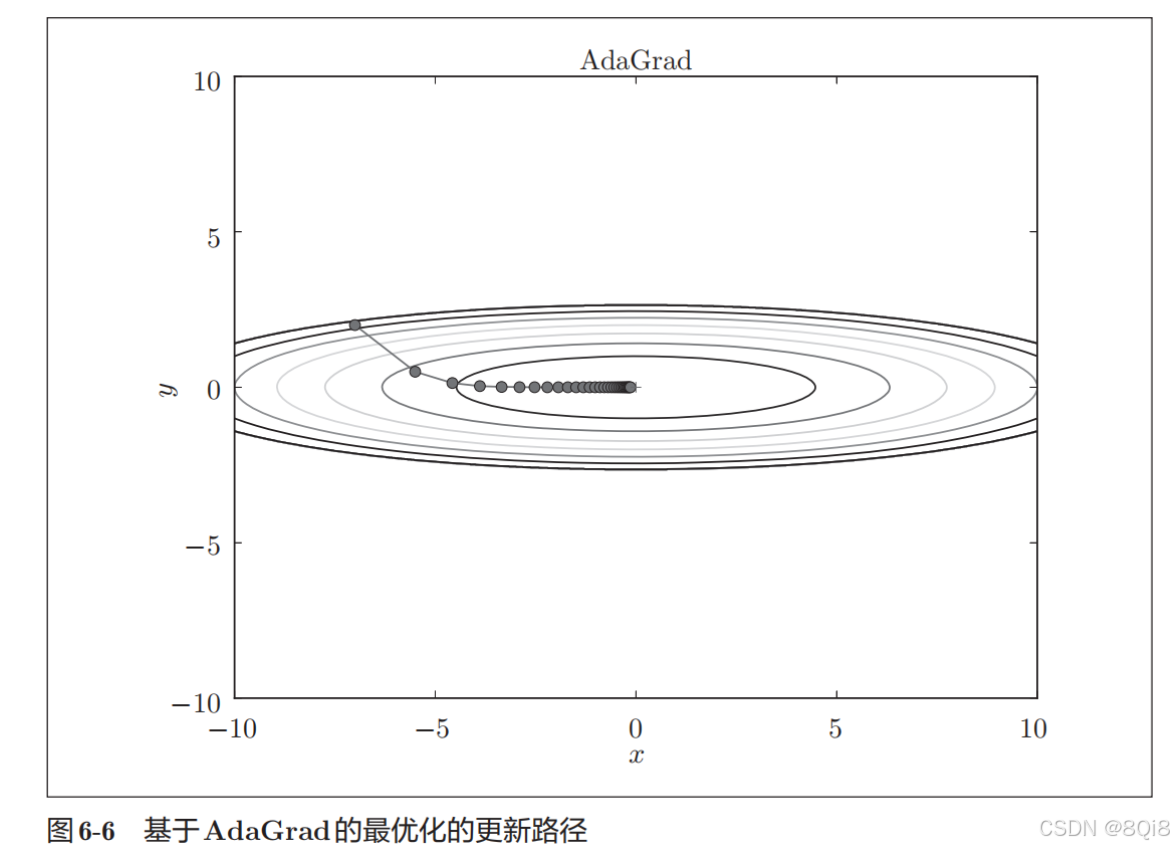
函数的取值高效地向着最小值移动。由于y轴方向上的梯度较大,因此刚开始变动较大,但是后面会根据这个较大的变动按比例进行调整,减小更新的步伐。因此,y轴方向上的更新程度被减弱,"之"字形的变动程度有所衰减。
-
Adam
Adam就是融合了Momentum和AdaGrad的方法。
pythonclass Adam: def __init__(self, lr=0.001, beta1=0.9, beta2=0.999): self.lr = lr self.beta1 = beta1 self.beta2 = beta2 self.iter = 0 self.m = None self.v = None def update(self, params, grads): if self.m is None: self.m, self.v = {}, {} for key, val in params.items(): self.m[key] = np.zeros_like(val) self.v[key] = np.zeros_like(val) self.iter += 1 lr_t = self.lr * np.sqrt(1.0 - self.beta2**self.iter) / (1.0 - self.beta1**self.iter) for key in params.keys(): #self.m[key] = self.beta1*self.m[key] + (1-self.beta1)*grads[key] #self.v[key] = self.beta2*self.v[key] + (1-self.beta2)*(grads[key]**2) self.m[key] += (1 - self.beta1) * (grads[key] - self.m[key]) self.v[key] += (1 - self.beta2) * (grads[key]**2 - self.v[key]) params[key] -= lr_t * self.m[key] / (np.sqrt(self.v[key]) + 1e-7) #unbias_m += (1 - self.beta1) * (grads[key] - self.m[key]) # correct bias #unbisa_b += (1 - self.beta2) * (grads[key]*grads[key] - self.v[key]) # correct bias #params[key] += self.lr * unbias_m / (np.sqrt(unbisa_b) + 1e-7)
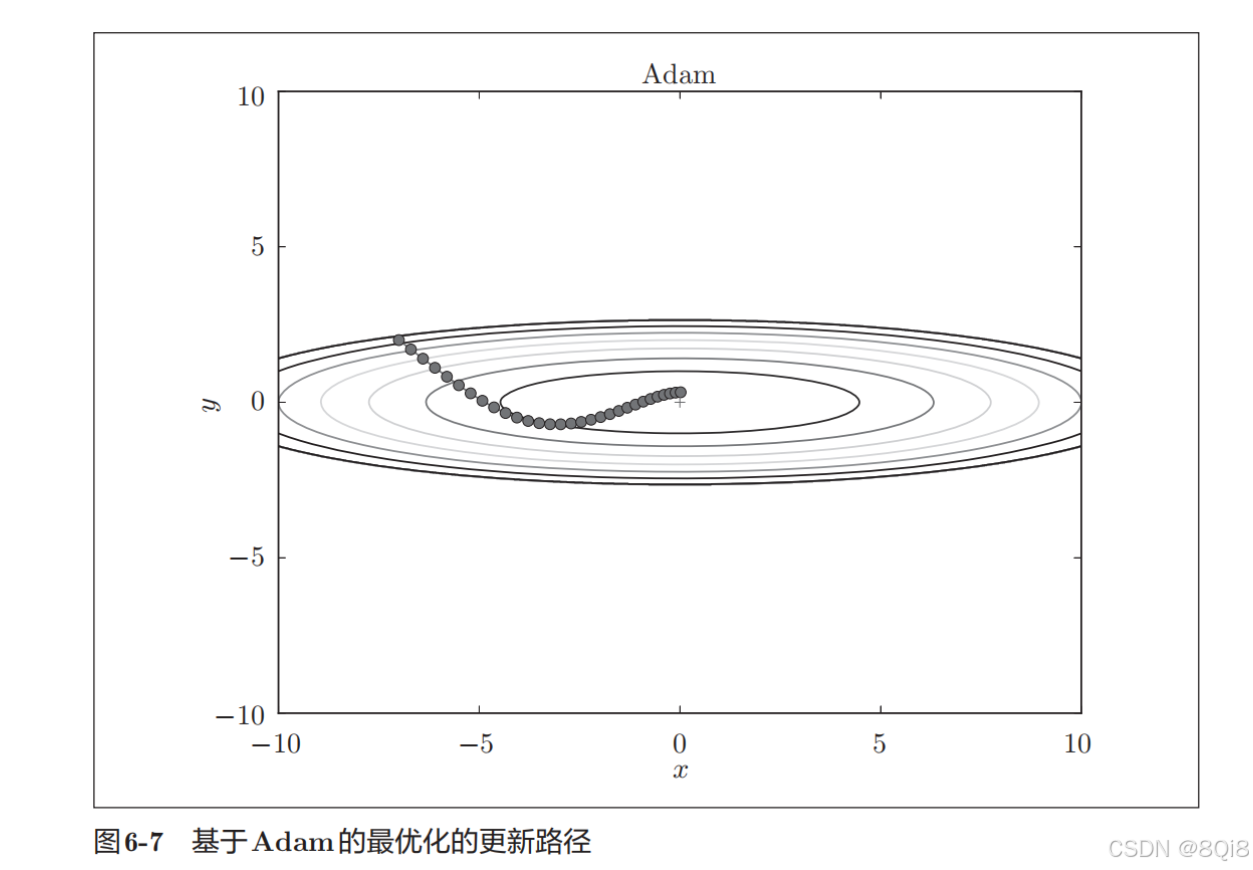
Adam会设置 3个超参数。一个是学习率(论文中以α出现),另外两个是一次momentum系数β1和二次momentum系数β2。根据论文,标准的设定值是β1为 0.9,β2 为 0.999。设置了这些值后,大多数情况下都能顺利运行。
-
使用哪种更新方法呢
比较一下这4种方法:
pythonimport sys, os sys.path.append(os.pardir) # 为了导入父目录的文件而进行的设定 import numpy as np import matplotlib.pyplot as plt from collections import OrderedDict from common.optimizer import * def f(x, y): return x**2 / 20.0 + y**2 def df(x, y): return x / 10.0, 2.0*y init_pos = (-7.0, 2.0) params = {} params['x'], params['y'] = init_pos[0], init_pos[1] grads = {} grads['x'], grads['y'] = 0, 0 optimizers = OrderedDict() optimizers["SGD"] = SGD(lr=0.95) optimizers["Momentum"] = Momentum(lr=0.1) optimizers["AdaGrad"] = AdaGrad(lr=1.5) optimizers["Adam"] = Adam(lr=0.3) idx = 1 for key in optimizers: optimizer = optimizers[key] x_history = [] y_history = [] params['x'], params['y'] = init_pos[0], init_pos[1] for i in range(30): x_history.append(params['x']) y_history.append(params['y']) grads['x'], grads['y'] = df(params['x'], params['y']) optimizer.update(params, grads) x = np.arange(-10, 10, 0.01) y = np.arange(-5, 5, 0.01) X, Y = np.meshgrid(x, y) Z = f(X, Y) # for simple contour line mask = Z > 7 Z[mask] = 0 # plot plt.subplot(2, 2, idx) idx += 1 plt.plot(x_history, y_history, 'o-', color="red") plt.contour(X, Y, Z) plt.ylim(-10, 10) plt.xlim(-10, 10) plt.plot(0, 0, '+') #colorbar() #spring() plt.title(key) plt.xlabel("x") plt.ylabel("y") plt.show()
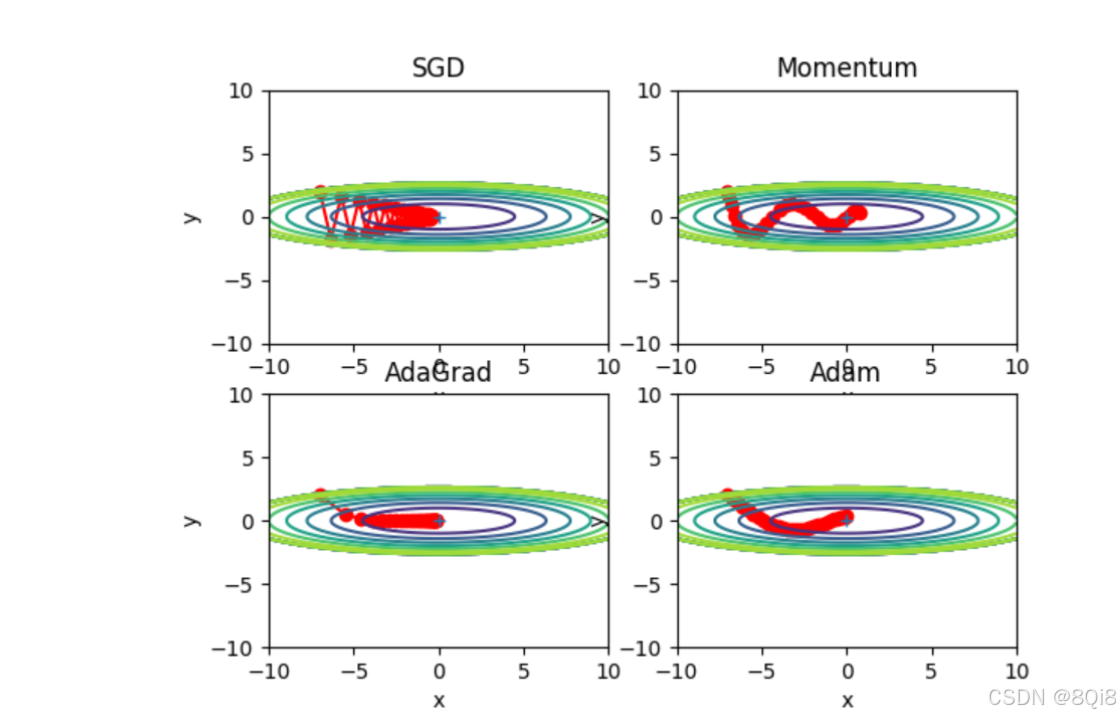
(目前)并不存在能在所有问题中都表现良好的方法。这4种方法各有各的特点,都有各自擅长解决的问题和不擅长解决的问题。
-
基于MNIST数据集的更新方法的比较
我 们 以 手 写 数 字 识 别 为 例,比 较 前 面 介 绍 的 SGD、Momentum、AdaGrad、Adam这4种方法,并确认不同的方法在学习进展上有多大程度的差异。
pythonimport os import sys sys.path.append(os.pardir) # 为了导入父目录的文件而进行的设定 import matplotlib.pyplot as plt from dataset.mnist import load_mnist from common.util import smooth_curve from common.multi_layer_net import MultiLayerNet from common.optimizer import * # 0:读入MNIST数据========== (x_train, t_train), (x_test, t_test) = load_mnist(normalize=True) train_size = x_train.shape[0] batch_size = 128 max_iterations = 2000 # 1:进行实验的设置========== optimizers = {} optimizers['SGD'] = SGD() optimizers['Momentum'] = Momentum() optimizers['AdaGrad'] = AdaGrad() optimizers['Adam'] = Adam() #optimizers['RMSprop'] = RMSprop() networks = {} train_loss = {} for key in optimizers.keys(): networks[key] = MultiLayerNet( input_size=784, hidden_size_list=[100, 100, 100, 100], output_size=10) train_loss[key] = [] # 2:开始训练========== for i in range(max_iterations): batch_mask = np.random.choice(train_size, batch_size) x_batch = x_train[batch_mask] t_batch = t_train[batch_mask] for key in optimizers.keys(): grads = networks[key].gradient(x_batch, t_batch) optimizers[key].update(networks[key].params, grads) loss = networks[key].loss(x_batch, t_batch) train_loss[key].append(loss) if i % 100 == 0: print( "===========" + "iteration:" + str(i) + "===========") for key in optimizers.keys(): loss = networks[key].loss(x_batch, t_batch) print(key + ":" + str(loss)) # 3.绘制图形========== markers = {"SGD": "o", "Momentum": "x", "AdaGrad": "s", "Adam": "D"} x = np.arange(max_iterations) for key in optimizers.keys(): plt.plot(x, smooth_curve(train_loss[key]), marker=markers[key], markevery=100, label=key) plt.xlabel("iterations") plt.ylabel("loss") plt.ylim(0, 1) plt.legend() plt.show()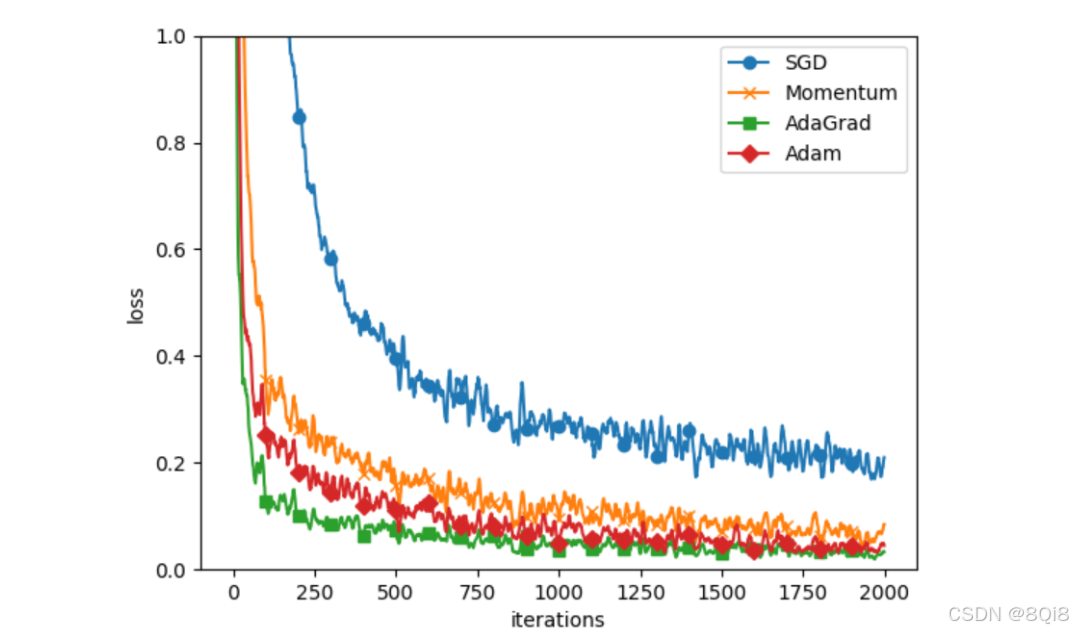
与SGD相比,其他3种方法学习得更快,而且速度基本相同,仔细看的话,AdaGrad的学习进行得稍微快一点 。这个实验需要注意的地方是,实验结果会随学习率等超参数、神经网络的结构(几层深等)的不同而发生变化。不过,一般而言,与SGD相比,其他3种方法可以学习得更快,有时最终的识别精度也更高。
二、权重的初始值
设定什么样的权重初始值,经常关系到神经网络的学习能否成功。
-
可以将权重初始值设为0吗
后面我们会介绍抑制过拟合、提高泛化能力的技巧------权值衰减(weight decay) 。权值衰减就是一种以减小权重参数的值为目的进行学习的方法。通过减小权重参数的值来抑制过拟合的发生。如果想减小权重的值,一开始就将初始值设为较小的值才是正途。但是,将权重初始值设为0的话,将无法正确进行学习。因为在误差反向传播法中,所有的权重值都会进行相同的更新。
因此,权重被更新为相同的值,并拥有了对称的值(重复的值)。这使得神经网络拥有许多不同的权重的意义丧失了。为了防止"权重均一化"(严格地讲,是为了瓦解权重的对称结构),必须随机生成初始值。
-
隐藏层的激活值(激活函数的输出数据)的分布
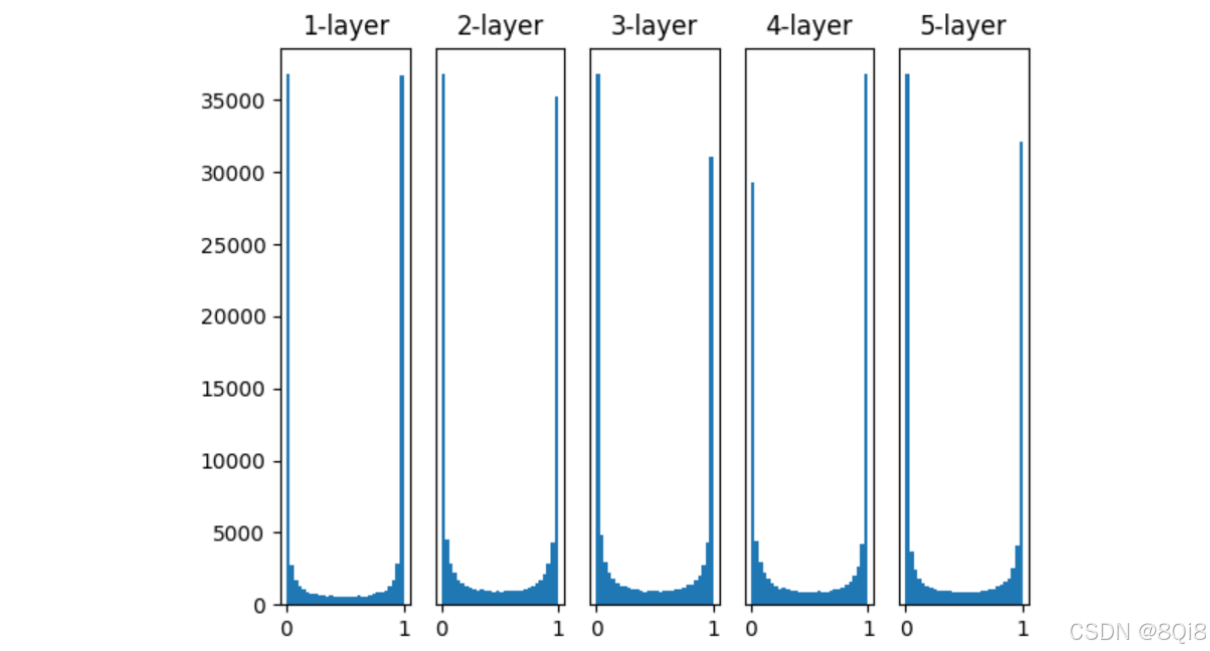
观察权重初始值是如何影响隐藏层的激活值的分布的。向一个5层神经网络(激活函数使用sigmoid函数)传入随机生成的输入数据,用直方图绘制各层激活值的数据分布。
pythonimport numpy as np import matplotlib.pyplot as plt def sigmoid(x): return 1 / (1 + np.exp(-x)) def ReLU(x): return np.maximum(0, x) def tanh(x): return np.tanh(x) input_data = np.random.randn(1000, 100) # 1000个数据 node_num = 100 # 各隐藏层的节点(神经元)数 hidden_layer_size = 5 # 隐藏层有5层 activations = {} # 激活值的结果保存在这里 x = input_data for i in range(hidden_layer_size): if i != 0: x = activations[i-1] # 改变初始值进行实验! w = np.random.randn(node_num, node_num) * 1 # w = np.random.randn(node_num, node_num) * 0.01 # w = np.random.randn(node_num, node_num) * np.sqrt(1.0 / node_num) # w = np.random.randn(node_num, node_num) * np.sqrt(2.0 / node_num) a = np.dot(x, w) # 将激活函数的种类也改变,来进行实验! z = sigmoid(a) # z = ReLU(a) # z = tanh(a) activations[i] = z # 绘制直方图 for i, a in activations.items(): plt.subplot(1, len(activations), i+1) plt.title(str(i+1) + "-layer") if i != 0: plt.yticks([], []) # plt.xlim(0.1, 1) # plt.ylim(0, 7000) plt.hist(a.flatten(), 30, range=(0,1)) plt.show()-
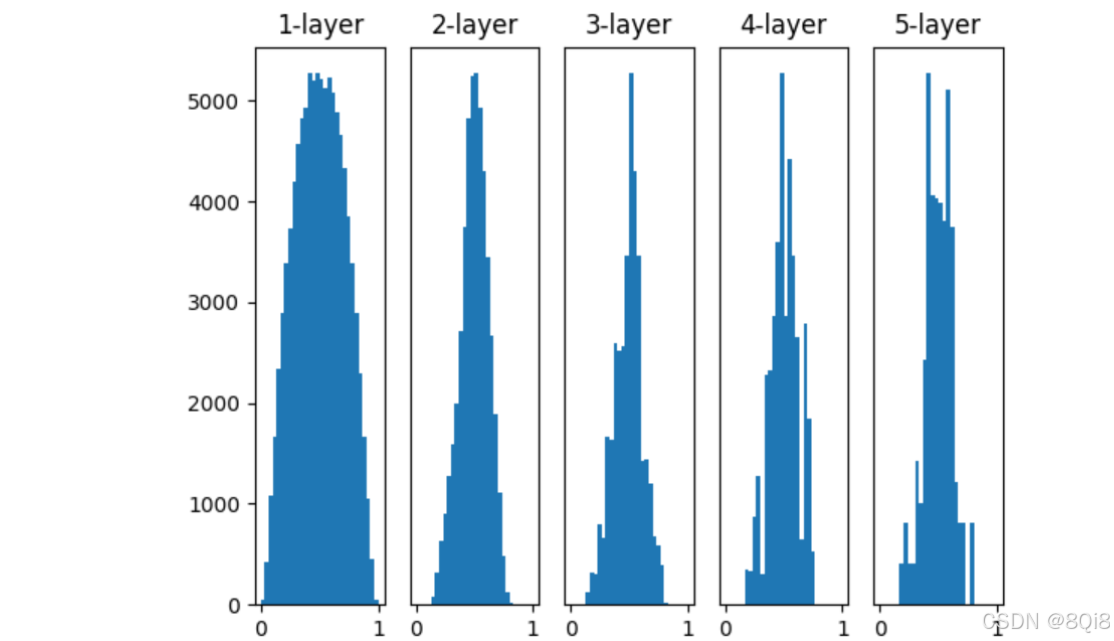
使用sigmoid函数,标准差为1的高斯分布
各层的激活值呈偏向0和1 的分布。这里使用的sigmoid函数是S型函数,随着输出不断地靠近0(或者靠近1),它的导数的值逐渐接近0 。因此,偏向0和1的数据分布会造成反向传播中梯度的值不断变小,最后消失 。这个问题称为梯度消失(gradient vanishing)。层次加深的深度学习中,梯度消失的问题可能会更加严重。
-
-
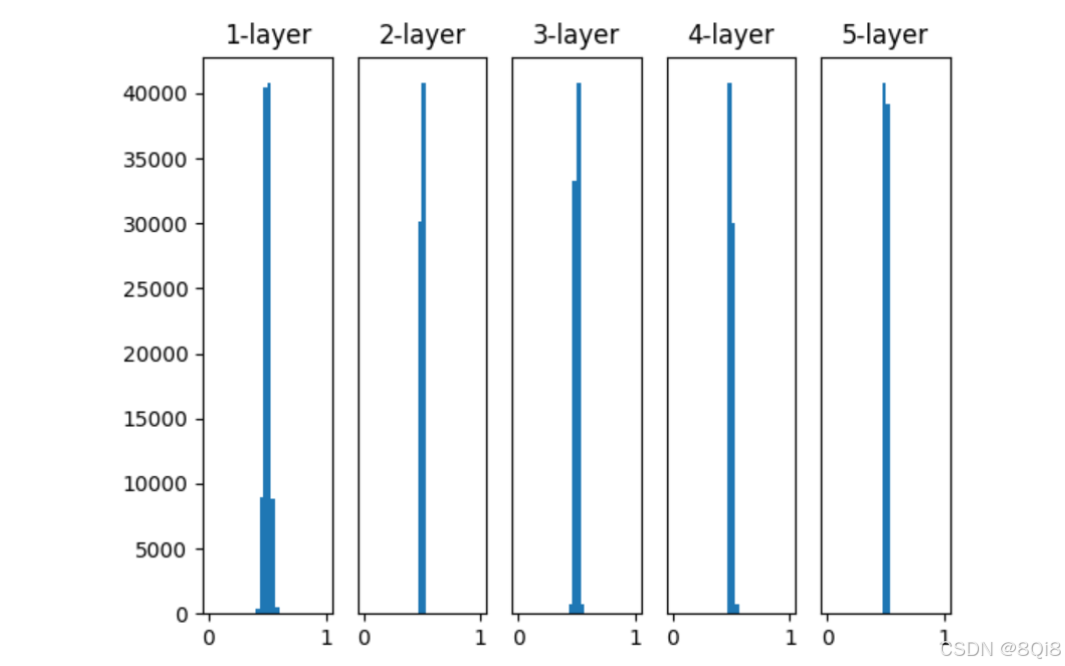
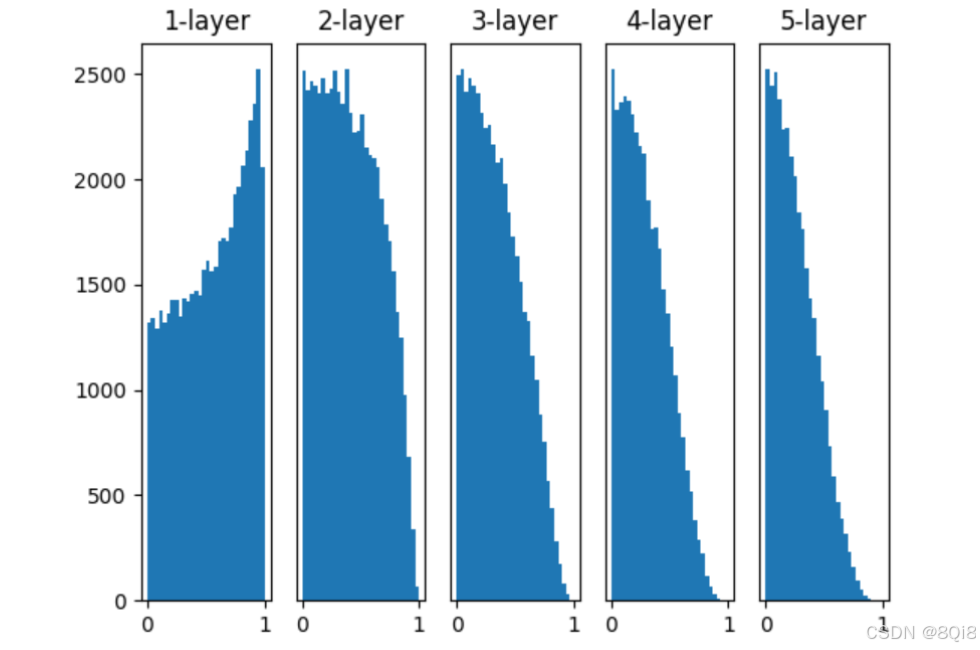
使用sigmoid函数,标准差为0.01的高斯分布
这次呈集中在0.5 附近的分布。因为不像刚才的例子那样偏向0和1,所以不会发生梯度消失的问题 。但是,激活值的分布有所偏向,说明在表现力上会有很大问题 。因为如果有多个神经元都输出几乎相同的值,那它们就没有存在的意义了。比如,如果100个神经元都输出几乎相同的值,那么也可以由1个神经元来表达基本相同的事情。因此,激活值在分布上有所偏向会出现"表现力受限"的问题。
-
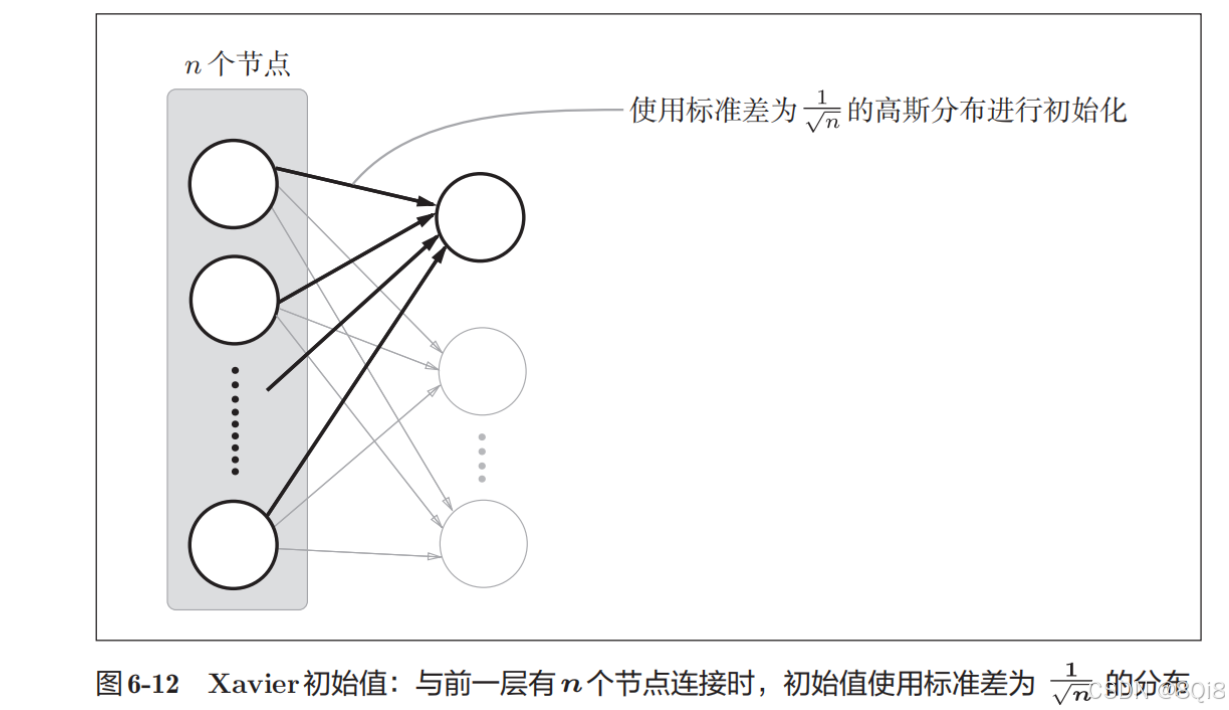
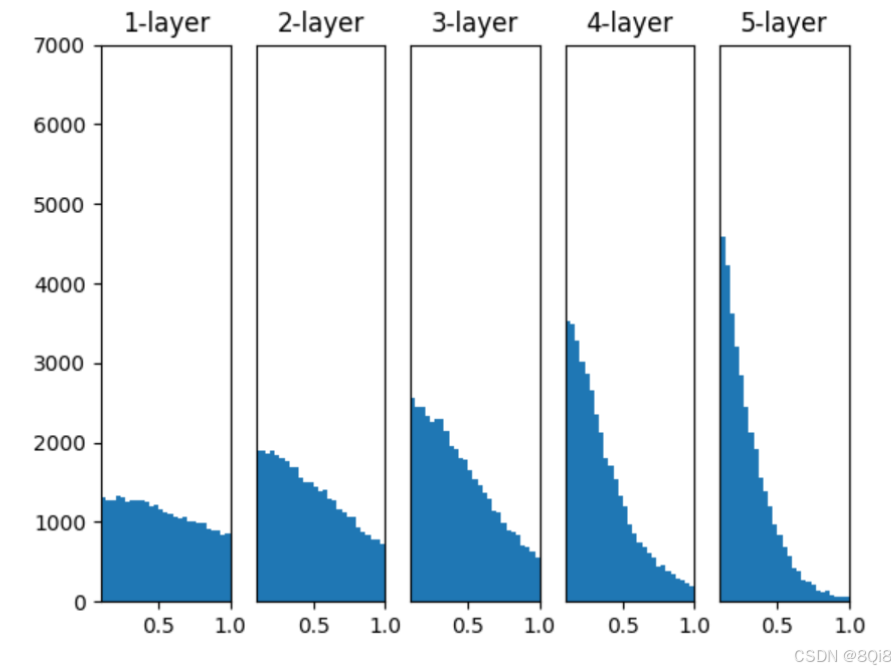
使用Xavier初始值
在一般的深度学习框架中,Xavier初始值已被作为标准使用,如果前一层的节点数为n,则初始值使用标准差为

的分布。使用Xavier初始值后,前一层的节点数越多,要设定为目标节点的初始值的权重尺度就越小。
越是后面的层,图像变得越歪斜,但是呈现了比之前更有广度的分布。因为各层间传递的数据有适当的广度,所以sigmoid函数的表现力不受限制。
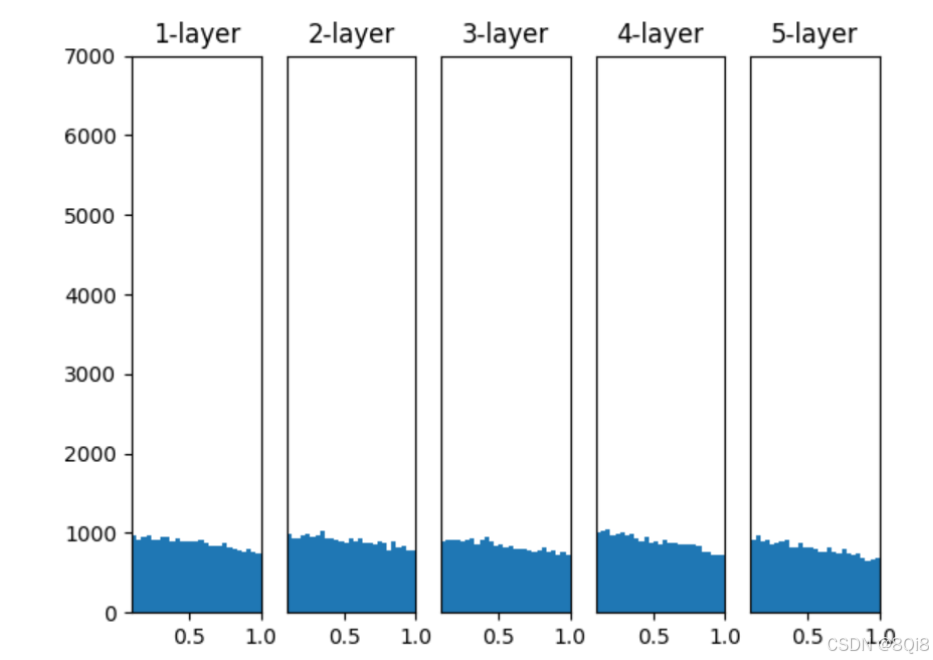
如果用tanh 函数(双曲线函数)代替sigmoid函数,这个稍微歪斜的问题就能得到改善。 使用tanh函数后,会呈漂亮的吊钟型分布。 tanh函数和sigmoid函数同是S型曲线函数,但tanh函数是关于原点(0, 0)对称的S型曲线,而sigmoid函数是关于(x, y)=(0, 0.5)对称的S型曲线。众所周知,用作激活函数的函数最好具有关于原点对称的性质。
-
使用tanh函数
-
ReLU的权重初始值
当激活函数使用ReLU时,一般推荐使用ReLU专用的初始值,也就是Kaiming He等人推荐的初始值,也称为"He初始值"。当前一层的节点数为n时,He初始值使用标准差为

的高斯分布。
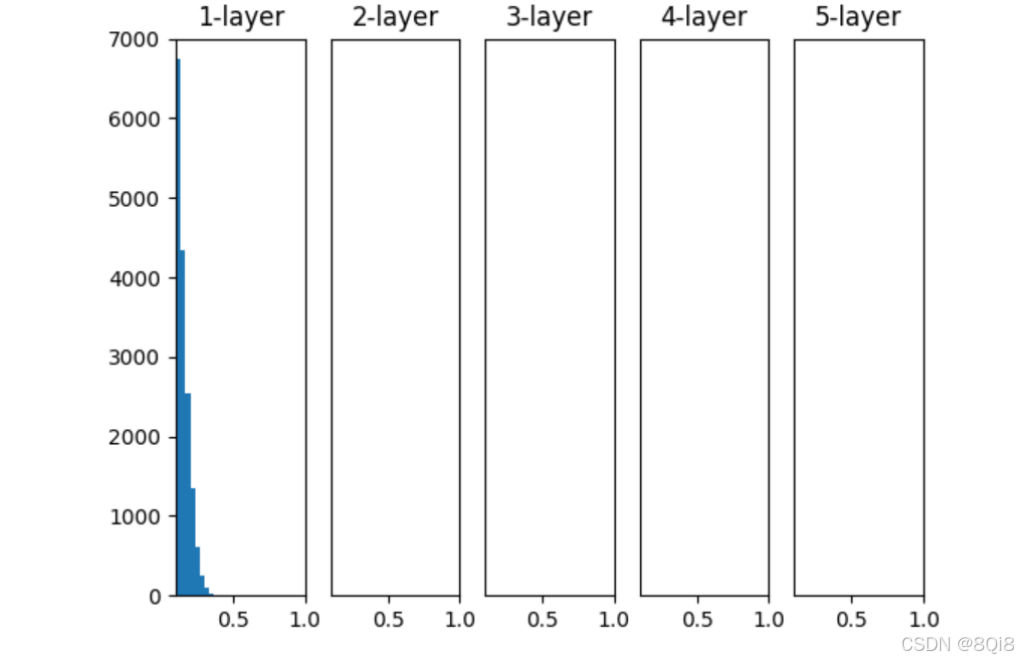
- 权重初始值为标准差是 0.01 的高斯分布时
-
权重初始值为 Xavier 初始值时
-
权重初始值为 He 初始值时
观察实验结果可知,当"std = 0.01"时,各层的激活值非常小。神经网络上传递的是非常小的值,说明逆向传播时权重的梯度也同样很小。这是很严重的问题,实际上学习基本上没有进展。
接下来是初始值为Xavier初始值时的结果。在这种情况下,随着层的加深,偏向一点点变大。实际上,层加深后,激活值的偏向变大,学习时会出现梯度消失的问题。而当初始值为He初始值时,各层中分布的广度相同。由于即便层加深,数据的广度也能保持不变,因此逆向传播时,也会传递合适的值。
总结:当激活函数使用ReLU时,权重初始值使用He初始值,当激活函数为sigmoid或tanh等S型曲线函数时,初始值使用Xavier初始值。
-
基于MNIST数据集的权重初始值的比较
我们基于std = 0.01、Xavier初始值、He初始值进行实验。
pythonimport os import sys sys.path.append(os.pardir) # 为了导入父目录的文件而进行的设定 import numpy as np import matplotlib.pyplot as plt from dataset.mnist import load_mnist from common.util import smooth_curve from common.multi_layer_net import MultiLayerNet from common.optimizer import SGD # 0:读入MNIST数据========== (x_train, t_train), (x_test, t_test) = load_mnist(normalize=True) train_size = x_train.shape[0] batch_size = 128 max_iterations = 2000 # 1:进行实验的设置========== weight_init_types = {'std=0.01': 0.01, 'Xavier': 'sigmoid', 'He': 'relu'} optimizer = SGD(lr=0.01) networks = {} train_loss = {} for key, weight_type in weight_init_types.items(): networks[key] = MultiLayerNet(input_size=784, hidden_size_list=[100, 100, 100, 100], output_size=10, weight_init_std=weight_type) train_loss[key] = [] # 2:开始训练========== for i in range(max_iterations): batch_mask = np.random.choice(train_size, batch_size) x_batch = x_train[batch_mask] t_batch = t_train[batch_mask] for key in weight_init_types.keys(): grads = networks[key].gradient(x_batch, t_batch) optimizer.update(networks[key].params, grads) loss = networks[key].loss(x_batch, t_batch) train_loss[key].append(loss) if i % 100 == 0: print("===========" + "iteration:" + str(i) + "===========") for key in weight_init_types.keys(): loss = networks[key].loss(x_batch, t_batch) print(key + ":" + str(loss)) # 3.绘制图形========== markers = {'std=0.01': 'o', 'Xavier': 's', 'He': 'D'} x = np.arange(max_iterations) for key in weight_init_types.keys(): plt.plot(x, smooth_curve(train_loss[key]), marker=markers[key], markevery=100, label=key) plt.xlabel("iterations") plt.ylabel("loss") plt.ylim(0, 2.5) plt.legend() plt.show()
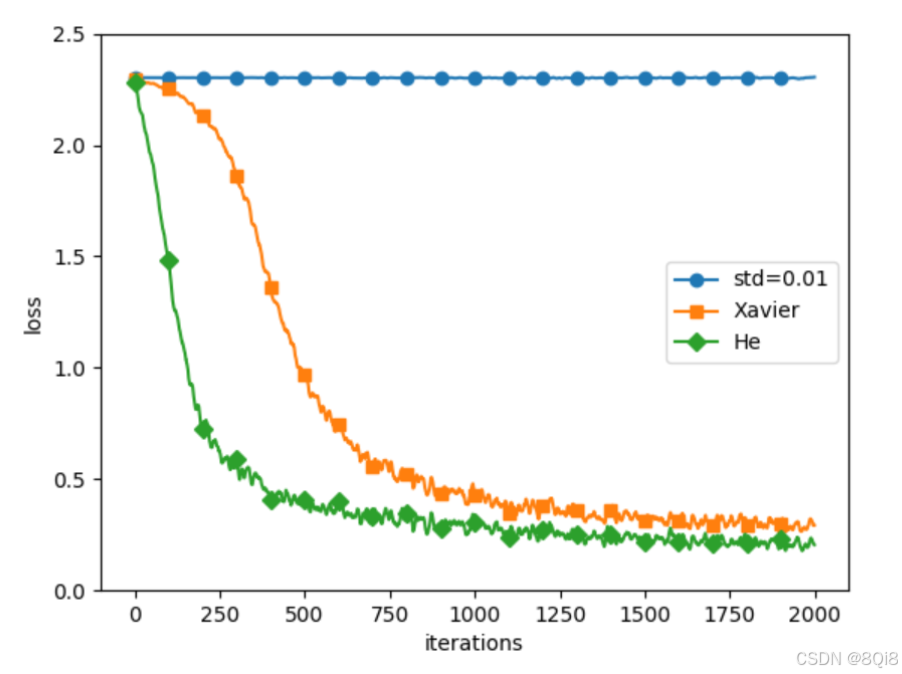
神经网络有5层,每层有100个神经元,激活函数使用的是ReLU 。std = 0.01时完全无法进行学习。这和刚才观察到的激活值的分布一样,是因为正向传播中传递的值很小(集中在0附近的数据) 。因此,逆向传播时求到的梯度也很小,权重几乎不进行更新。相反,当权重初始值为Xavier初始值和He初始值时,学习进行得很顺利。并且,我们发现He初始值时的学习进度更快一些。
三、Batch Normalization
-
Batch Normalization 的算法
• 可以使学习快速进行(可以增大学习率)。
• 不那么依赖初始值(对于初始值不用那么神经质)。
• 抑制过拟合(降低Dropout等的必要性)。
Batch Norm的思路是调整各层的激活值分布使其拥有适当的广度。为此,要向神经网络中插入对数据分布进行正规化的层 ,即Batch Normalization层(下文简称Batch Norm层) ,如图所示。
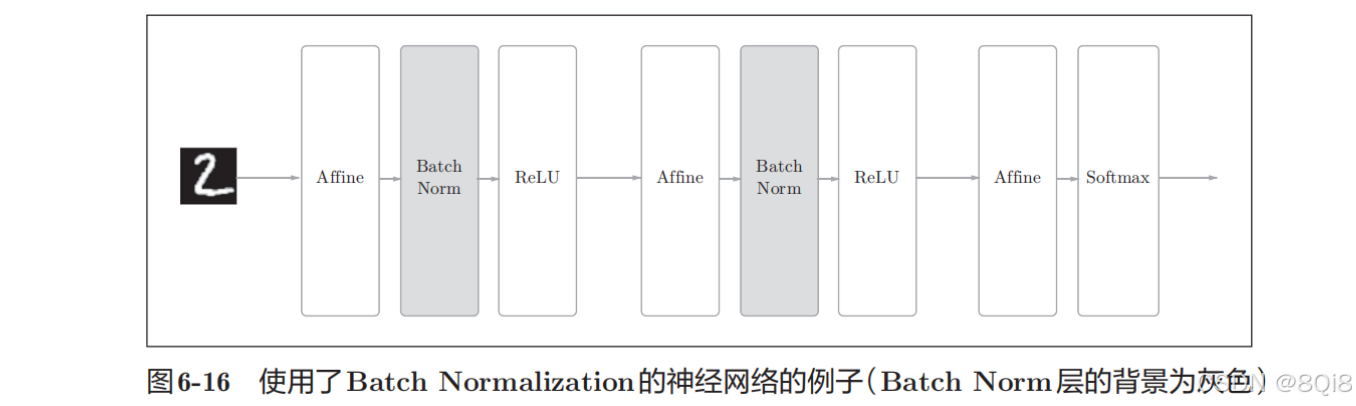
Batch Norm以进行学习时的mini-batch为单位,按mini-batch进行正规化。具体而言,就是进行使数据分布的均值为0、方差为1的正规化。
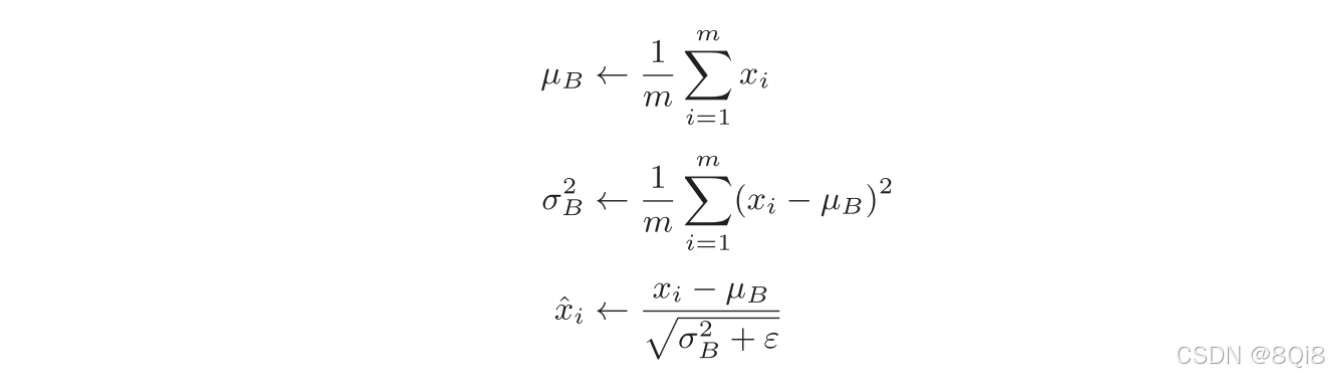
ε是一个微小值(比如,10e-7等),它是为了防止出现除以0的情况。通过将这个处理插入到激活函数的前面(或者后面),可以减小数据分布的偏向。
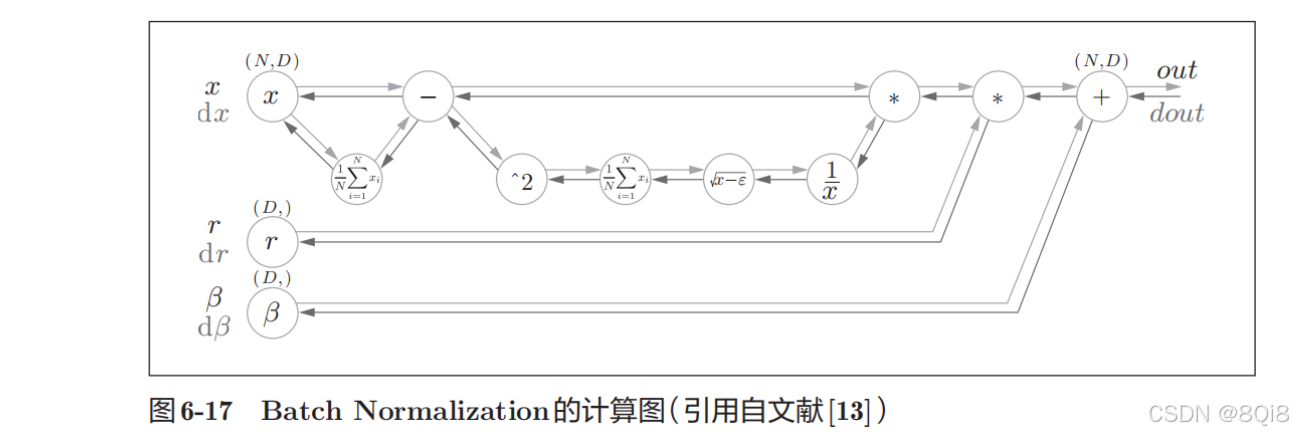
接着,Batch Norm层会对正规化后的数据进行缩放和平移的变换,用数学式可以如下表示。

这个算法是神经网络上的正向传播。
-
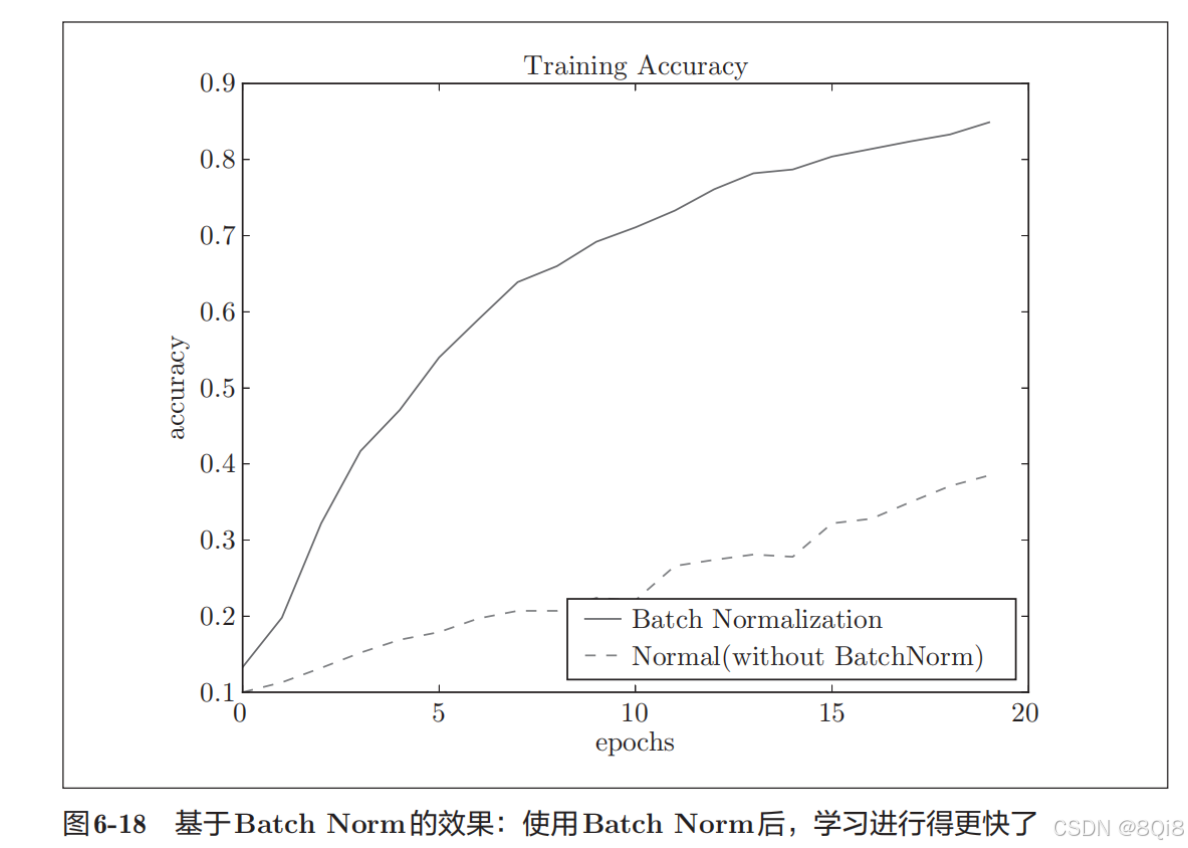
Batch Normalization的评估
使用MNIST数据集,观察使用Batch Norm层和不使用Batch Norm层时学习的过程会如何变化。
给予不同的初始值尺度,观察学习的过程如何变化。
python
import sys, os
sys.path.append(os.pardir) # 为了导入父目录的文件而进行的设定
import numpy as np
import matplotlib.pyplot as plt
from dataset.mnist import load_mnist
from common.multi_layer_net_extend import MultiLayerNetExtend
from common.optimizer import SGD, Adam
(x_train, t_train), (x_test, t_test) = load_mnist(normalize=True)
# 减少学习数据
x_train = x_train[:1000]
t_train = t_train[:1000]
max_epochs = 20
train_size = x_train.shape[0]
batch_size = 100
learning_rate = 0.01
def __train(weight_init_std):
bn_network = MultiLayerNetExtend(input_size=784, hidden_size_list=[100, 100, 100, 100, 100], output_size=10,
weight_init_std=weight_init_std, use_batchnorm=True)
network = MultiLayerNetExtend(input_size=784, hidden_size_list=[100, 100, 100, 100, 100], output_size=10,
weight_init_std=weight_init_std)
optimizer = SGD(lr=learning_rate)
train_acc_list = []
bn_train_acc_list = []
iter_per_epoch = max(train_size / batch_size, 1)
epoch_cnt = 0
for i in range(1000000000):
batch_mask = np.random.choice(train_size, batch_size)
x_batch = x_train[batch_mask]
t_batch = t_train[batch_mask]
for _network in (bn_network, network):
grads = _network.gradient(x_batch, t_batch)
optimizer.update(_network.params, grads)
if i % iter_per_epoch == 0:
train_acc = network.accuracy(x_train, t_train)
bn_train_acc = bn_network.accuracy(x_train, t_train)
train_acc_list.append(train_acc)
bn_train_acc_list.append(bn_train_acc)
print("epoch:" + str(epoch_cnt) + " | " + str(train_acc) + " - " + str(bn_train_acc))
epoch_cnt += 1
if epoch_cnt >= max_epochs:
break
return train_acc_list, bn_train_acc_list
# 3.绘制图形==========
weight_scale_list = np.logspace(0, -4, num=16)
x = np.arange(max_epochs)
for i, w in enumerate(weight_scale_list):
print( "============== " + str(i+1) + "/16" + " ==============")
train_acc_list, bn_train_acc_list = __train(w)
plt.subplot(4,4,i+1)
plt.title("W:" + str(w))
if i == 15:
plt.plot(x, bn_train_acc_list, label='Batch Normalization', markevery=2)
plt.plot(x, train_acc_list, linestyle = "--", label='Normal(without BatchNorm)', markevery=2)
else:
plt.plot(x, bn_train_acc_list, markevery=2)
plt.plot(x, train_acc_list, linestyle="--", markevery=2)
plt.ylim(0, 1.0)
if i % 4:
plt.yticks([])
else:
plt.ylabel("accuracy")
if i < 12:
plt.xticks([])
else:
plt.xlabel("epochs")
plt.legend(loc='lower right')
plt.show()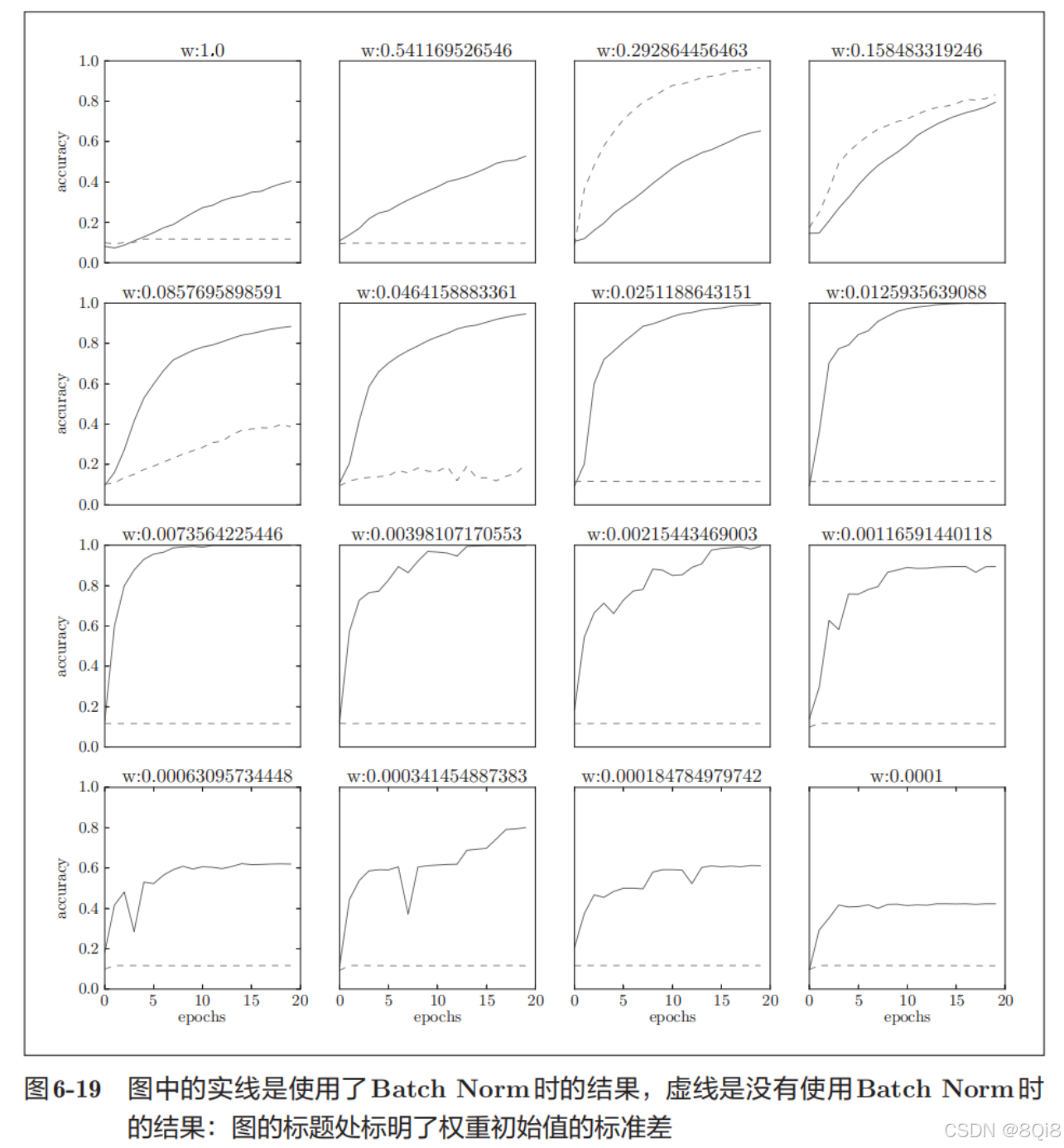
我们发现,几乎所有的情况下都是使用Batch Norm时学习进行得更快。同时也可以发现,实际上,在不使用Batch Norm的情况下,如果不赋予一个尺度好的初始值,学习将完全无法进行。