简介
本次实验旨在评估德州仪器 (TI) 毫米波传感器在超声波传感器难以应对的场景中检测障碍物的能力。这些环境包括:
- 传感器检测距离小于 10 厘米的物体
- 传感器检测距离大于 10 米的物体
- 传感器位于保护玻璃板后方
- 传感器暴露在灰尘或泥土中。
本次实验表明,德州仪器 (TI) 毫米波传感器能够检测不同距离、不同环境以及材料板后方的障碍物。本实验并列比较了毫米波传感器和超声波传感器的检测结果。
设置
本实验的设置可分为两部分:物理设置和软件设置。
物理设置
物理设置包括设置环境信息,例如目标与传感器天线之间的距离、所用目标的类型、硬件设置以及其他任何物理考虑因素。
- 测试在实验室中进行。
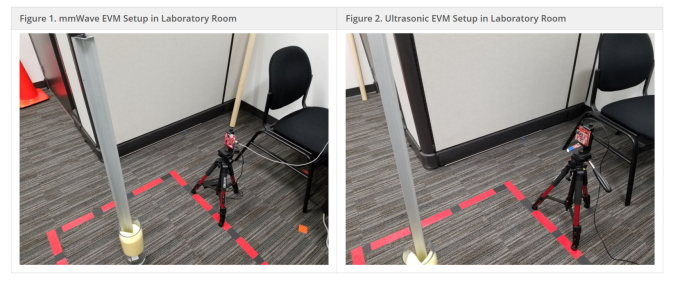
- AWR1642BOOST-ODS EVM 使用三脚架垂直安装,如下图所示。
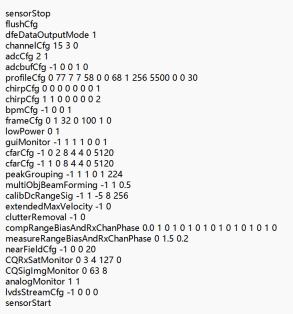
- 超声波传感器也使用三脚架垂直安装,如下图所示。
- 在两个传感器前方不同距离处垂直放置一根金属杆。
软件设置
软件设置信息包含 SDK 版本、chirp 配置、GUI 可视化工具以及其他软件注意事项。
AWR1642BOOST-ODS EVM 已刷入 mmWave SDK 2.0 ODS 二进制文件,并连接到运行 ODS Demo Visualizer 的 Windows 笔记本电脑。
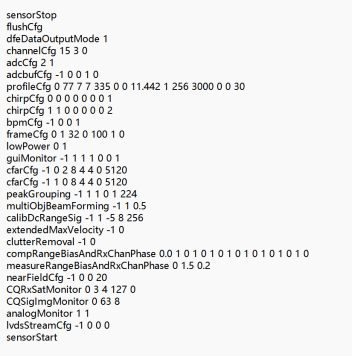
chirp 配置用于以下情况的障碍物:
- 1、距离小于 10 米:
2、距离大于 10 米:
3、超声波传感器连接到运行 GUI 可视化工具的 Windows 笔记本电脑
方法
以下章节介绍了执行八个测试场景的方法。
对于毫米波传感器,采用以下步骤:
- 为指定的测试设置创建物理设置
- 将 ODS Demo 二进制文件刷入 AWR1642BOOST-ODS EVM,并将 EVM 连接到主机 PC
- 在主机 PC 上启动 ODS Demo Visualizer,并使用提供的配置文件设置 Visualizer,如下所示:
- 平台:xWR16xx
- SDK 版本:2.0
- 所需配置:由配置文件定义
- 所有其他设置:由配置文件定义
- 下载配置文件
当物体距离小于 10 米时,使用:
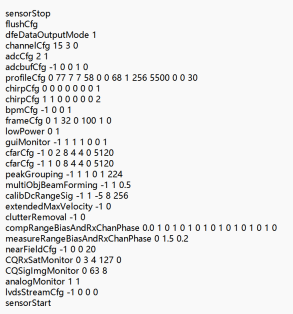
当物体距离大于 10 米时,使用:
- 转到 Visualizer 上的"Plots"选项卡,然后点击"从 PC 加载配置并发送"按钮
- 选择下载的配置文件,然后按"打开"。
4、分析 X-Y 和 Y-Z 散点图以及距离剖面图,查看物体是否出现在预期距离。
5、根据测试设置,根据需要重复步骤 4
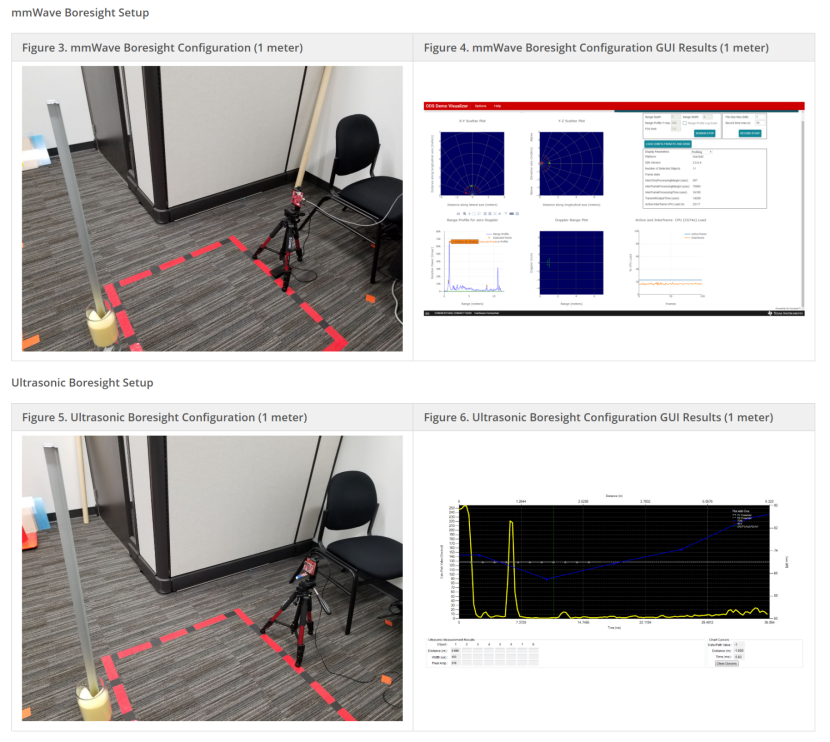
视轴配置
在此测试配置中,金属杆被放置在传感器正前方不同距离的位置。此设置中使用的距离包括:
- 0.62 米
- 0.05 米
- 1 米
- 2 米
- 10 米
此配置对应于"结果"部分中的测试 #1-#5。
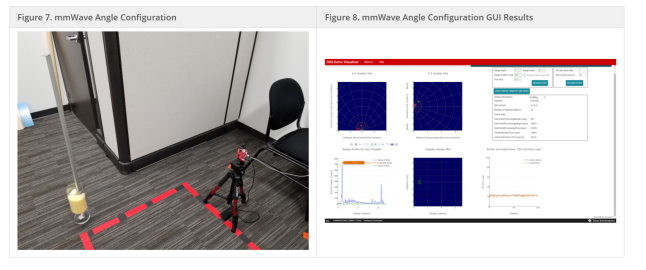
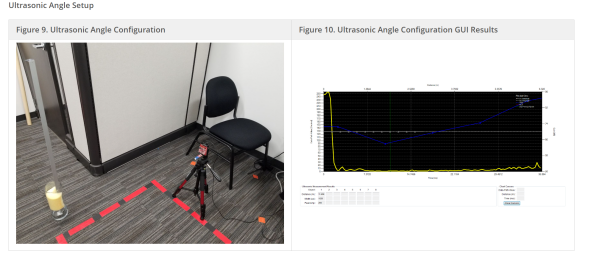
角度配置
在此测试配置中,金属杆放置在距离传感器 1 米、呈 30 度角的固定位置。
此配置对应于"结果"部分中的测试 #6。
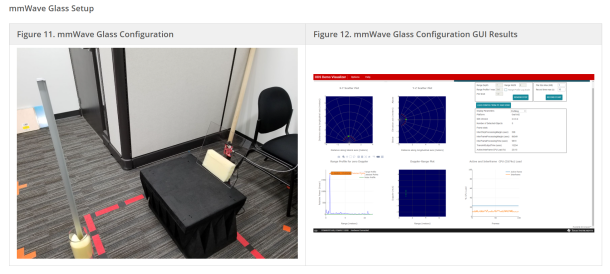
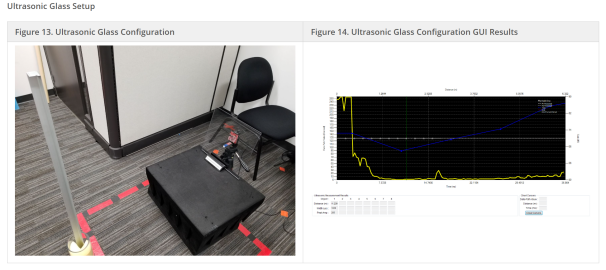
玻璃配置
在此测试配置中,金属杆被放置在传感器正前方一米的固定距离处。传感器前方还放置了一块玻璃板。
此配置对应于"结果"部分中的测试 #7。
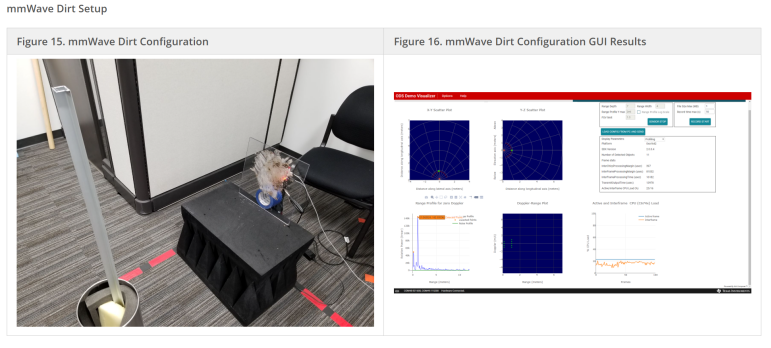
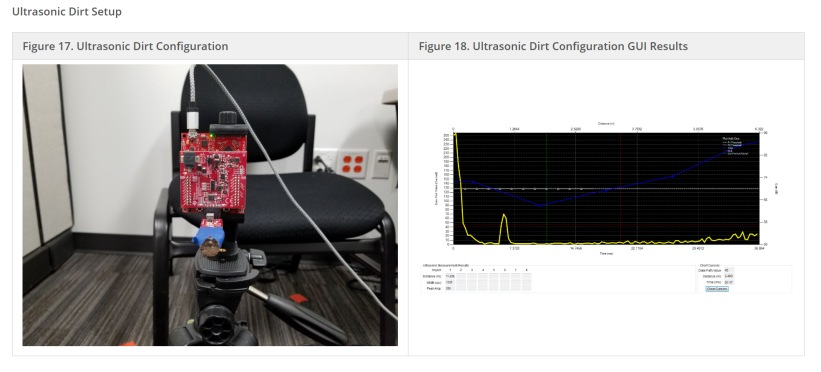
污垢配置
在此测试配置中,金属杆放置在传感器正前方一米的固定距离处。在毫米波传感器正前方的玻璃板上涂抹一层薄薄的污垢。在超声波传感器的换能器上也涂抹了一层薄薄的污垢。
此配置对应于"结果"部分中的测试 #8。
结果
下表汇总了上一节所列步骤的结果。
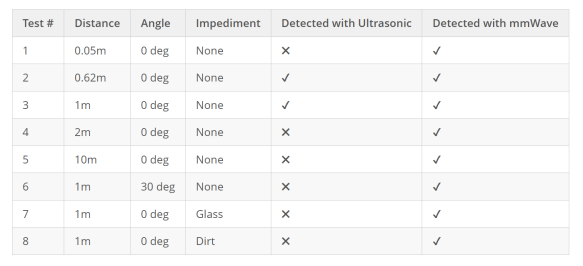
结论
使用 AWR1642BOOST-ODS EVM,我们可以检测各种距离的目标物体,包括近距离和远距离。此外,AWR1642BOOST-ODS EVM 还可以检测不在其正前方的物体。AWR1642BOOST-ODS 还可以穿透放置在传感器前方的障碍物,并仍然能够检测到目标物体。另一方面,超声波传感器无法检测到目标物体,除非目标物体位于传感器正前方且距离约为一米。此外,本实验中提供的线性调频脉冲配置代表了配置传感器进行此类障碍物检测的几种可能方法之一。先进的线性调频脉冲设计、天线设计和算法可以提供更好的距离分辨率和障碍物穿透。
Reference:mmWave Vs Ultrasonic