车辆动力学模型
文章目录
- 车辆动力学模型
-
- [第一章:Kinematic Bicycle Model + Longitudinal Dynamics(运动学模型 + 纵向动力学)](#第一章:Kinematic Bicycle Model + Longitudinal Dynamics(运动学模型 + 纵向动力学))
- [1.1 模型简介与使用场景](#1.1 模型简介与使用场景)
- [1.2 变量定义与建模假设](#1.2 变量定义与建模假设)
-
- [📌 状态变量:](#📌 状态变量:)
- [📌 参数定义:](#📌 参数定义:)
- [1.3 横向运动建模(几何约束)](#1.3 横向运动建模(几何约束))
-
- [🔸 基本几何关系:](#🔸 基本几何关系:)
- [🔸 航向角变化(角速度):](#🔸 航向角变化(角速度):)
- [✅ 综合横向运动学模型为:](#✅ 综合横向运动学模型为:)
- [1.4 纵向动力学建模(牛顿第二定律)](#1.4 纵向动力学建模(牛顿第二定律))
-
- [🔸 纵向力平衡公式:](#🔸 纵向力平衡公式:)
- [✅ 简化版纵向动力学(无坡道时):](#✅ 简化版纵向动力学(无坡道时):)
- [1.5 模型组合与完整系统形式](#1.5 模型组合与完整系统形式)
-
- [🚘 状态空间向量:](#🚘 状态空间向量:)
- [✅ 联合动力学模型表达式:](#✅ 联合动力学模型表达式:)
- [1.6 状态空间形式](#1.6 状态空间形式)
- [1.8 控制约束与示例参数设定](#1.8 控制约束与示例参数设定)
-
- [📌 几何与限制参数:](#📌 几何与限制参数:)
- [📌 控制约束(可直接用于 MPC):](#📌 控制约束(可直接用于 MPC):)
- [第二章:Dynamic Bicycle Model + Longitudinal Dynamics](#第二章:Dynamic Bicycle Model + Longitudinal Dynamics)
- [2.1 模型简介与使用场景](#2.1 模型简介与使用场景)
- [2.2 状态变量与车辆假设](#2.2 状态变量与车辆假设)
-
- [📌 状态变量](#📌 状态变量)
- 坐标系统说明
- [2.3 动力学建模](#2.3 动力学建模)
-
- [2.3.1 质心动力学(横纵向)](#2.3.1 质心动力学(横纵向))
- [2.3.2 偏航角动力学(绕 z 轴)](#2.3.2 偏航角动力学(绕 z 轴))
- [2.3.3 轮胎侧向力建模(线性轮胎模型)](#2.3.3 轮胎侧向力建模(线性轮胎模型))
- [🔸 侧偏角建模(假设小角度):](#🔸 侧偏角建模(假设小角度):)
- [2.3.4 纵向动力学补充](#2.3.4 纵向动力学补充)
-
- [🌟 方案 A ------ 与横向 3 状态并列(常用于耦合 MPC)](#🌟 方案 A —— 与横向 3 状态并列(常用于耦合 MPC))
- [🌟 方案 B ------ 线性近似 + 速度误差通道(常用于层次 LQR)](#🌟 方案 B —— 线性近似 + 速度误差通道(常用于层次 LQR))
- [2.4 完整系统模型(非线性)](#2.4 完整系统模型(非线性))
- [2.5 简化线性模型(含纵向误差)](#2.5 简化线性模型(含纵向误差))
-
- [2.5.1 定义误差变量](#2.5.1 定义误差变量)
- [2.5.2 线性化动力学](#2.5.2 线性化动力学)
- [2.6 线性状态空间形式](#2.6 线性状态空间形式)
-
- [2.6.1 状态 & 输入向量](#2.6.1 状态 & 输入向量)
- [2.6.2 系统矩阵](#2.6.2 系统矩阵)
- [2.6.3 离散化(零阶保持)](#2.6.3 离散化(零阶保持))
- [2.7 典型参数设定表(仿真或工程应用)](#2.7 典型参数设定表(仿真或工程应用))
- [第三章:曲线坐标系车辆模型(Curvilinear Coordinates Vehicle Model)](#第三章:曲线坐标系车辆模型(Curvilinear Coordinates Vehicle Model))
- [3.1 建模背景与坐标系定义](#3.1 建模背景与坐标系定义)
-
- [📌 坐标系定义:](#📌 坐标系定义:)
- [3.2 状态变量与控制输入定义](#3.2 状态变量与控制输入定义)
-
- [✅ 状态向量:](#✅ 状态向量:)
- [✅ 控制输入:](#✅ 控制输入:)
- [3.3 偏移角 β \beta β 定义与推导](#3.3 偏移角 β \beta β 定义与推导)
- [3.4 曲线坐标系下的非线性运动学模型](#3.4 曲线坐标系下的非线性运动学模型)
-
- [🔷 基于几何关系推导动态方程:](#🔷 基于几何关系推导动态方程:)
- [3.5 状态空间模型汇总表达](#3.5 状态空间模型汇总表达)
- [3.6 模型特性与应用说明](#3.6 模型特性与应用说明)
- [3.7 模型结构总结](#3.7 模型结构总结)
- 第四章:三种车辆模型的对比分析与选择建议
- [4.1 建模结构对比](#4.1 建模结构对比)
- [4.2 控制友好性与离散化性能](#4.2 控制友好性与离散化性能)
- [4.3 适用速度范围与典型场景](#4.3 适用速度范围与典型场景)
- [4.4 控制器适配建议](#4.4 控制器适配建议)
- [4.5 总结对比表](#4.5 总结对比表)
- [4.6 总结建议](#4.6 总结建议)
第一章:Kinematic Bicycle Model + Longitudinal Dynamics(运动学模型 + 纵向动力学)
1.1 模型简介与使用场景
Kinematic Bicycle Model 是一种简化的车辆模型,仅考虑车辆的几何结构与转向约束,忽略轮胎侧偏、惯性力、质量分布等因素。
- 优势:模型简单、计算效率高、适合低速场景;
- 典型应用:路径规划、低速轨迹跟踪、MPC 控制建模;
- 配合纵向动力学模型:可以在路径跟踪同时考虑加速、刹车行为。
1.2 变量定义与建模假设
📌 状态变量:
| 符号 | 含义 | 单位 |
|---|---|---|
| x x x | 车体质心在全局坐标系下的 X 位置 | m |
| y y y | 车体质心在全局坐标系下的 Y 位置 | m |
| θ \theta θ | 航向角(车辆朝向与 X 轴夹角) | rad |
| v v v | 车辆质心处的速度 | m/s |
| δ \delta δ | 前轮转角(控制输入) | rad |
📌 参数定义:
| 符号 | 含义 |
|---|---|
| L L L | 车辆轴距(前轮轴心到后轮轴心的距离) |
| L f , L r L_f, L_r Lf,Lr | 质心到前/后轮的距离,满足 L = L f + L r L = L_f + L_r L=Lf+Lr |
| a , b a, b a,b | 一般用于表示车辆前后半轴距 |
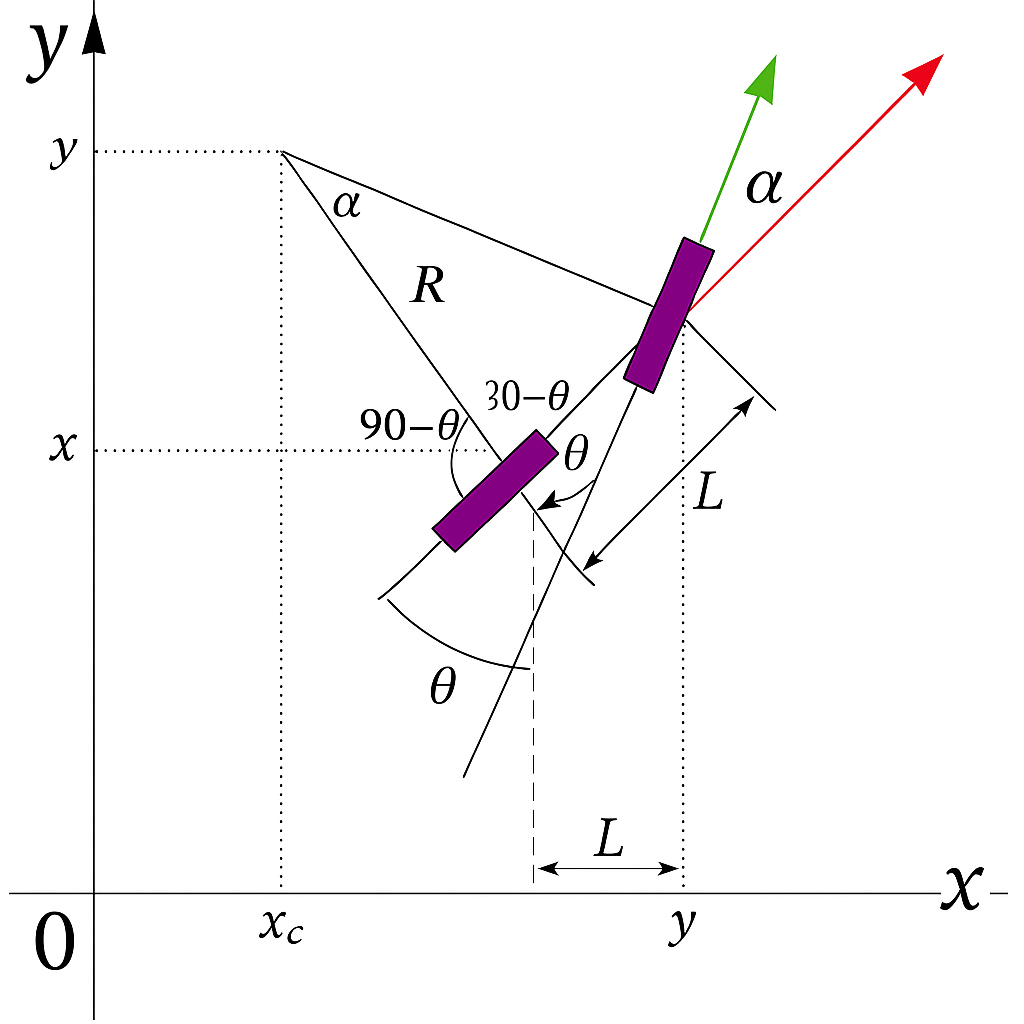
1.3 横向运动建模(几何约束)
从几何角度建模车辆的运动。假设车辆速度 v v v 作用在质心上,方向与车身一致(即忽略横向打滑、侧偏角等现象)。
🔸 基本几何关系:
车辆质心沿着车头方向 θ \theta θ 运动,同时受前轮转角 δ\deltaδ 控制车辆的转向。
{ x ˙ = v cos ( θ ) y ˙ = v sin ( θ ) \begin{cases} \dot{x} = v \cos(\theta) \\ \dot{y} = v \sin(\theta) \end{cases} {x˙=vcos(θ)y˙=vsin(θ)
🔸 航向角变化(角速度):
车辆转弯时将产生偏航角速度 θ˙\dot{\theta}θ˙,其近似表达式为:
θ ˙ = v L tan ( δ ) \dot{\theta} = \dfrac{v}{L} \tan(\delta) θ˙=Lvtan(δ)
这是由于前轮转角控制了车辆的转向半径 R = L tan ( δ ) R = \frac{L}{\tan(\delta)} R=tan(δ)L,而角速度 ω = v R \omega = \frac{v}{R} ω=Rv。
✅ 综合横向运动学模型为:
{ x ˙ = v cos ( θ ) y ˙ = v sin ( θ ) θ ˙ = v L tan ( δ ) \boxed{ \begin{cases} \dot{x} = v \cos(\theta) \\ \dot{y} = v \sin(\theta) \\ \dot{\theta} = \dfrac{v}{L} \tan(\delta) \end{cases} } ⎩ ⎨ ⎧x˙=vcos(θ)y˙=vsin(θ)θ˙=Lvtan(δ)
1.4 纵向动力学建模(牛顿第二定律)
考虑车辆的加速度来自于纵向驱动力(发动机提供)和阻力(如滚动阻力、空气阻力、坡度等)。
🔸 纵向力平衡公式:
m v ˙ = F drive − F drag − F roll − F brake m \dot{v} = F_{\text{drive}} - F_{\text{drag}} - F_{\text{roll}} - F_{\text{brake}} mv˙=Fdrive−Fdrag−Froll−Fbrake
可进一步展开如下:
v ˙ = 1 m ( F drive − 1 2 ρ C d A v 2 − m g f r − F brake ) \dot{v} = \dfrac{1}{m} \left( F_{\text{drive}} - \dfrac{1}{2} \rho C_d A v^2 - mg f_r - F_{\text{brake}} \right) v˙=m1(Fdrive−21ρCdAv2−mgfr−Fbrake)
其中:
- ρ \rho ρ:空气密度
- C d C_d Cd:空气阻力系数
- A A A:迎风面积
- f r f_r fr:滚阻系数
✅ 简化版纵向动力学(无坡道时):
当只考虑输入加速度 a a a,或用简单模型时可写作:
v ˙ = a 或 v ˙ = F long m \dot{v} = a \quad\text{或}\quad \dot{v} = \dfrac{F_{\text{long}}}{m} v˙=a或v˙=mFlong
其中 a a a 由油门/刹车控制, F long F_{\text{long}} Flong 是总纵向力。
1.5 模型组合与完整系统形式
🚘 状态空间向量:
x = x , y , θ , v T , u = δ , a T \mathbf{x} = x, y, \\theta, v^T, \quad \mathbf{u} = \\delta, a^T x=x,y,θ,vT,u=δ,aT
✅ 联合动力学模型表达式:
{ x ˙ = v cos ( θ ) y ˙ = v sin ( θ ) θ ˙ = v L tan ( δ ) v ˙ = a \boxed{ \begin{cases} \dot{x} = v \cos(\theta) \\ \dot{y} = v \sin(\theta) \\ \dot{\theta} = \dfrac{v}{L} \tan(\delta) \\ \dot{v} = a \end{cases} } ⎩ ⎨ ⎧x˙=vcos(θ)y˙=vsin(θ)θ˙=Lvtan(δ)v˙=a
1.6 状态空间形式
为了方便后续控制器设计(如 LQR、MPC),我们明确给出状态与输入向量结构:
-
状态向量:
x = x y θ v \mathbf{x} = \begin{bmatrix} x \\ y \\ \theta \\ v \end{bmatrix} x= xyθv
-
控制向量:
u = δ a \mathbf{u} = \begin{bmatrix} \delta \\ a \end{bmatrix} u=δa
-
连续时间系统:
x ˙ = v cos ( θ ) v sin ( θ ) v L tan ( δ ) a \dot{\mathbf{x}} = \begin{bmatrix} v \cos(\theta) \\ v \sin(\theta) \\ \frac{v}{L} \tan(\delta) \\ a \end{bmatrix} x˙= vcos(θ)vsin(θ)Lvtan(δ)a
-
离散时间系统(用于 MPC):
x k + 1 = x k + T ⋅ f ( x k , u k ) \mathbf{x}_{k+1} = \mathbf{x}_k + T \cdot f(\mathbf{x}_k, \mathbf{u}_k) xk+1=xk+T⋅f(xk,uk)
1.8 控制约束与示例参数设定
在实际控制器设计中,我们常常需要引入物理约束条件,典型参数如下:
📌 几何与限制参数:
| 参数名称 | 符号 | 示例值 | 说明 |
|---|---|---|---|
| 车辆轴距 | L L L | 2.5 m | 前后轮间距离 |
| 最大前轮转角 | δ max \delta_{\max} δmax | \\pm30° | 控制输入上限 |
| 最大加速度 | a max a_{\max} amax | 3.0 m/s² | 最大油门控制 |
| 最小加速度 | a min a_{\min} amin | --5.0 m/s² | 最大制动能力 |
| 最大速度 | v max v_{\max} vmax | 35 m/s | 大约 126 km/h |
| 最小速度 | v min v_{\min} vmin | 0 m/s | 静止状态 |
📌 控制约束(可直接用于 MPC):
{ δ ∈ − 0.52 , + 0.52 rad a ∈ − 5.0 , + 3.0 m/s 2 v ∈ 0 , 35 m/s \begin{cases} \delta \in -0.52,\\; +0.52\;\text{rad} \\ a \in -5.0,\\; +3.0\;\text{m/s}^2 \\ v \in 0,\\; 35\;\text{m/s} \end{cases} ⎩ ⎨ ⎧δ∈−0.52,+0.52rada∈−5.0,+3.0m/s2v∈0,35m/s
第二章:Dynamic Bicycle Model + Longitudinal Dynamics
2.1 模型简介与使用场景
Dynamic Bicycle Model 是将车辆建模为一个"动力学双轮车模型",考虑了轮胎的侧向力、车身的惯性和质心偏移等因素,相较于运动学模型更贴近真实车辆运动,尤其适用于:
- 中高速车辆建模
- 稳定性控制(如电子稳定系统 ESP)
- 轨迹跟踪时的打滑补偿控制
- 横向控制器(LQR、MPC)建模
2.2 状态变量与车辆假设
📌 状态变量
| 符号 | 含义 | 单位 |
|---|---|---|
| v x v_x vx | 车体坐标系下的纵向速度 | m/s |
| v y v_y vy | 车体坐标系下的横向速度 | m/s |
| r r r | 偏航角速度(yaw rate) | rad/s |
| δ \delta δ | 前轮转角(控制输入) | rad |
| a x a_x ax | 加速度/驱动力(控制输入) | m/s² |
坐标系统说明
我们以车辆质心为原点建立车体坐标系:
- x x x 轴沿车辆前进方向
- y y y 轴指向车辆左侧(右手坐标系)
- 偏航角速度 r = θ ˙ r = \dot{\theta} r=θ˙ 为车体绕垂直轴的旋转速度
2.3 动力学建模
2.3.1 质心动力学(横纵向)
对质心进行牛顿第二定律建模,在车体坐标系中:
{ m ( v ˙ x − r v y ) = F x m ( v ˙ y + r v x ) = F y f cos δ + F y r \begin{cases} m(\dot{v}x - r v_y) = F{x} \\ m(\dot{v}y + r v_x) = F{yf} \cos\delta + F_{yr} \end{cases} {m(v˙x−rvy)=Fxm(v˙y+rvx)=Fyfcosδ+Fyr
其中:
- F x F_x Fx:车辆前进方向的总驱动力(发动机牵引或制动)
- F y f , F y r F_{yf}, F_{yr} Fyf,Fyr:前/后轮产生的侧向力
- m m m:车辆质量
- r v y rv_y rvy, r v x r v_x rvx:哥氏力项(非惯性坐标下的修正)
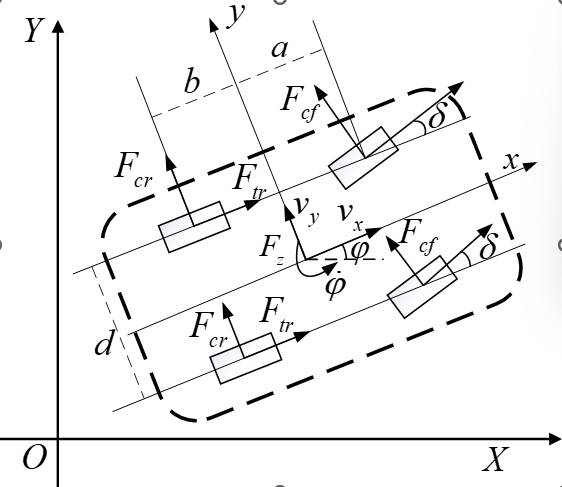
2.3.2 偏航角动力学(绕 z 轴)
以车辆质心为参考点,进行刚体转动分析:
r ˙ = l f F y f cos δ − l r F y r \dot{r} = l_f F_{yf} \cos\delta - l_r F_{yr} r˙=lfFyfcosδ−lrFyr
- I z I_z Iz:车辆绕垂直轴的转动惯量
- l f l_f lf、 l r l_r lr:质心到前轴、后轴的距离
2.3.3 轮胎侧向力建模(线性轮胎模型)
侧向力来源于轮胎与地面间的侧偏角 α \alpha α,在小角度近似下(线性区):
F y f = − C α f α f , F y r = − C α r α r F_{yf} = -C_{\alpha f} \alpha_f, \quad F_{yr} = -C_{\alpha r} \alpha_r Fyf=−Cαfαf,Fyr=−Cαrαr
其中:
- C α f , C α r C_{\alpha f}, C_{\alpha r} Cαf,Cαr:轮胎侧偏刚度(单位侧偏角产生的侧向力)
🔸 侧偏角建模(假设小角度):
{ α f = δ − v y + l f r v x α r = − v y − l r r v x \begin{cases} \alpha_f = \delta - \dfrac{v_y + l_f r}{v_x} \\ \alpha_r = - \dfrac{v_y - l_r r}{v_x} \end{cases} ⎩ ⎨ ⎧αf=δ−vxvy+lfrαr=−vxvy−lrr
2.3.4 纵向动力学补充
在车体坐标系下对纵向方向列牛顿方程:
m ( v ˙ x − r v y ) = F drive − F drag − F roll − F brake m\bigl(\dot v_x - r v_y\bigr) = F_{\text{drive}} - F_{\text{drag}} - F_{\text{roll}} - F_{\text{brake}} m(v˙x−rvy)=Fdrive−Fdrag−Froll−Fbrake
-
驱动力 / 制动力
F drive = ∑ i T i / R w , F brake = ∑ i F b , i F_{\text{drive}} = \sum_i T_i/R_w, \qquad F_{\text{brake}} = \sum_i F_{b,i} Fdrive=∑iTi/Rw,Fbrake=∑iFb,i
T i T_i Ti:各驱动轮轮端扭矩; R w R_w Rw:有效轮胎半径。
-
空气阻力
F drag = 1 2 ρ C d A f v x 2 F_{\text{drag}}=\tfrac12\,\rho C_d A_f v_x^2 Fdrag=21ρCdAfvx2
-
滚动阻力
F roll = m g f r F_{\text{roll}} = m g f_r Froll=mgfr
若在坡道上,还应加上坡度阻力 F slope = m g sin θ slope F_{\text{slope}} = m g \sin\theta_{\text{slope}} Fslope=mgsinθslope。
整理得到纵向加速度:
KaTeX parse error: \tag works only in display equations
🌟 方案 A ------ 与横向 3 状态并列(常用于耦合 MPC)
新的 7 维状态向量
x = v x v y r e y e ψ s δ T \mathbf{x} = \begin{bmatrix} v_x & v_y & r & e_y & e_\psi & s & \delta \end{bmatrix}^{\!T} x=vxvyreyeψsδT
- 轨迹进度 s s s由 s ˙ = v x cos e ψ − v y sin e ψ \dot s = v_x\cos e_\psi - v_y\sin e_\psi s˙=vxcoseψ−vysineψ 给出。
- 控制向量
u = T drive , F brake , δ T \mathbf{u}=T_{\\text{drive}},\\,F_{\\text{brake}},\\,\\delta^{T} u=Tdrive,Fbrake,δT
插入式写法(与原横向方程并排)即可得到完整 非线性 7-DOF 模型,用于能量--稳定性联合 MPC。
🌟 方案 B ------ 线性近似 + 速度误差通道(常用于层次 LQR)
- 设定参考巡航速度 V ref V_{\text{ref}} Vref。
- 定义速度误差 e v = v x − V ref e_v = v_x - V_{\text{ref}} ev=vx−Vref。
- 在 小角度、 v x ≈ V ref v_x\approx V_{\text{ref}} vx≈Vref 前提下线性化式 (8):
KaTeX parse error: \tag works only in display equations
其中 K drag = 1 2 ρ C d A f 2 V ref K_{\text{drag}}=\tfrac12\rho C_d A_f\,2V_{\text{ref}} Kdrag=21ρCdAf2Vref.
这样就得到 横向 4 维 + 纵向 1 维 的 5 维 LTI 系统
x ~ ˙ = A x ~ + B u ~ ~\dot{\tilde{\mathbf{x}}}=A\tilde{\mathbf{x}}+B\tilde{\mathbf{u}} x~˙=Ax~+Bu~,其中
x ~ = v y , r , e y , e ψ , e v T \tilde{\mathbf{x}}=v_y,\\; r,\\; e_y,\\; e_\\psi,\\; e_v^T x~=vy,r,ey,eψ,evT,
u ~ = δ , F drive , F brake T \tilde{\mathbf{u}}=\\delta,\\; F_{\\text{drive}},\\; F_{\\text{brake}}^T u~=δ,Fdrive,FbrakeT.
2.4 完整系统模型(非线性)
将以上所有项代入后,得到非线性动力学模型:
{ v ˙ x = 1 m ( F x ) + r v y v ˙ y = 1 m ( − C α f ( δ − v y + l f r v x ) − C α r ( − v y − l r r v x ) ) − r v x r ˙ = 1 I z ( l f ( − C α f ) ( δ − v y + l f r v x ) − l r ( − C α r ) ( v y − l r r v x ) ) \boxed{ \begin{cases} \dot{v}x = \dfrac{1}{m} \left( F_x \right) + r v_y \\ \dot{v}y = \dfrac{1}{m} \left( -C{\alpha f}(\delta - \frac{v_y + l_f r}{v_x}) - C{\alpha r}(- \frac{v_y - l_r r}{v_x}) \right) - r v_x \\ \dot{r} = \dfrac{1}{I_z} \left( l_f (-C_{\alpha f}) (\delta - \frac{v_y + l_f r}{v_x}) - l_r (-C_{\alpha r}) (\frac{v_y - l_r r}{v_x}) \right) \end{cases} } ⎩ ⎨ ⎧v˙x=m1(Fx)+rvyv˙y=m1(−Cαf(δ−vxvy+lfr)−Cαr(−vxvy−lrr))−rvxr˙=Iz1(lf(−Cαf)(δ−vxvy+lfr)−lr(−Cαr)(vxvy−lrr))
2.5 简化线性模型(含纵向误差)
线性化前提
- 车辆以恒定参考速度 V ref V_{\text{ref}} Vref 行驶, v x ≈ V ref v_x \approx V_{\text{ref}} vx≈Vref。
- 轮胎小侧偏角、 sin θ ≈ θ , cos θ ≈ 1 \sin\theta\approx\theta,\;\cos\theta\approx1 sinθ≈θ,cosθ≈1。
- 纵向、横向耦合项中的高阶积被忽略。
2.5.1 定义误差变量
e v = v x − V ref , e y , e ψ 同前节定义 e_v = v_x - V_{\text{ref}},\quad e_y,\;e_\psi\ \text{同前节定义} ev=vx−Vref,ey,eψ 同前节定义
2.5.2 线性化动力学
v ˙ y = − C α f − C α r m V ref v y + − C α f l f + C α r l r m V ref − V ref r + C α f m δ r ˙ = − C α f l f + C α r l r I z V ref v y − C α f l f 2 + C α r l r 2 I z V ref r + C α f l f I z δ e ˙ y = v y + V ref e ψ e ˙ ψ = r e ˙ v = − 1 m ( 1 2 ρ C d A f V ref 2 + m g f r ) + 1 m ( F x − F brake ) \begin{aligned} \dot v_y &= \frac{-C_{\alpha f} - C_{\alpha r}}{mV_{\text{ref}}}\,v_y\; +\;\Bigl\\frac{-C_{\\alpha f}l_f + C_{\\alpha r}l_r}{mV_{\\text{ref}}}-V_{\\text{ref}}\\Bigr\,r +\;\frac{C_{\alpha f}}{m}\,\delta \\4pt \dot r &= \frac{-C_{\alpha f}l_f + C_{\alpha r}l_r}{I_z V_{\text{ref}}}\,v_y -\;\frac{C_{\alpha f}l_f^2 + C_{\alpha r}l_r^2}{I_z V_{\text{ref}}}\,r +\;\frac{C_{\alpha f}l_f}{I_z}\,\delta \\4pt \dot e_y &= v_y + V_{\text{ref}}\,e_\psi \\2pt \dot e_\psi &= r \\2pt \dot e_v &= -\frac{1}{m}\!\Bigl(\tfrac12\rho C_dA_f\,V_{\text{ref}}^2 + mgf_r\Bigr) +\frac{1}{m}\bigl(F_{x}-F_{\text{brake}}\bigr) \end{aligned} v˙yr˙e˙ye˙ψe˙v=mVref−Cαf−Cαrvy+mVref−Cαflf+Cαrlr−Vrefr+mCαfδ=IzVref−Cαflf+Cαrlrvy−IzVrefCαflf2+Cαrlr2r+IzCαflfδ=vy+Vrefeψ=r=−m1(21ρCdAfVref2+mgfr)+m1(Fx−Fbrake)
最后一行把空气阻力、滚阻归并为常数项;若需严格 LTI,可将常数项视为外部扰动并在控制环外补偿。
2.6 线性状态空间形式
2.6.1 状态 & 输入向量
x ~ = v y r e y e ψ e v , u ~ = δ F x F brake \tilde{\mathbf{x}} = \begin{bmatrix} v_y \\ r \\ e_y \\ e_\psi \\ e_v \end{bmatrix}, \qquad \tilde{\mathbf{u}} = \begin{bmatrix} \delta \\ F_{x} \\ F_{\text{brake}} \end{bmatrix} x~= vyreyeψev ,u~= δFxFbrake
2.6.2 系统矩阵
令
A 1 = − C α f + C α r m V ref , A 2 = − C α f l f − C α r l r m V ref − V ref , A 3 = − C α f l f − C α r l r I z V ref , A 4 = − C α f l f 2 + C α r l r 2 I z V ref , K drag = 1 2 ρ C d A f 2 V ref . \begin{aligned} A_1 &= -\dfrac{C_{\alpha f}+C_{\alpha r}}{mV_{\text{ref}}}, \qquad A_2 = -\dfrac{C_{\alpha f}l_f-C_{\alpha r}l_r}{mV_{\text{ref}}}-V_{\text{ref}},\\4pt A_3 &= -\dfrac{C_{\alpha f}l_f-C_{\alpha r}l_r}{I_zV_{\text{ref}}},\qquad A_4 = -\dfrac{C_{\alpha f}l_f^{2}+C_{\alpha r}l_r^{2}}{I_zV_{\text{ref}}},\\4pt K_{\text{drag}} &= \tfrac12\rho C_dA_f\,2V_{\text{ref}}. \end{aligned} A1A3Kdrag=−mVrefCαf+Cαr,A2=−mVrefCαflf−Cαrlr−Vref,=−IzVrefCαflf−Cαrlr,A4=−IzVrefCαflf2+Cαrlr2,=21ρCdAf2Vref.. A = A 1 A 2 0 0 0 A 3 A 4 0 0 0 1 0 0 − V ref 0 0 1 0 0 0 0 0 0 0 − K drag m , B = C α f m 0 0 C α f l f I z 0 0 0 0 0 0 0 0 0 1 m − 1 m . A = \begin{bmatrix} A_1 & A_2 & 0 & 0 & 0 \\ A_3 & A_4 & 0 & 0 & 0 \\ 1 & 0 & 0 & -V_{\text{ref}} & 0 \\ 0 & 1 & 0 & 0 & 0 \\ 0 & 0 & 0 & 0 & -\dfrac{K_{\text{drag}}}{m} \end{bmatrix}, \qquad B = \begin{bmatrix} \frac{C_{\alpha f}}{m} & 0 & 0 \\ \frac{C_{\alpha f}l_f}{I_z} & 0 & 0 \\ 0 & 0 & 0 \\ 0 & 0 & 0 \\ 0 & \dfrac{1}{m} & -\dfrac{1}{m} \end{bmatrix}. A= A1A3100A2A40100000000−Vref000000−mKdrag ,B= mCαfIzCαflf0000000m10000−m1 .
- A A A 五行五列对应 x ~ ~\tilde{\mathbf{x}} x~;
- B B B 五行三列对应 u ~ ~\tilde{\mathbf{u}} u~。
若只用一个合成纵向输入 F long F_{\text{long}} Flong,可将 B B B 最后一行改为 1 m \dfrac{1}{m} m1 并删除第 3 列。
2.6.3 离散化(零阶保持)
采样周期 TTT 下:
A d = e A T , B d = ∫ 0 T e A τ d τ B . A_d = e^{AT},\qquad B_d = \int_{0}^{T} e^{A\tau}\,d\tau \; B. Ad=eAT,Bd=∫0TeAτdτB.
在 Python/Matlab 中可用
scipy.linalg.expm或c2d获得 A d , B d A_d,B_d Ad,Bd。
2.7 典型参数设定表(仿真或工程应用)
以下是典型中型车辆的模型参数(参考文献或工程系统常用):
| 参数名称 | 符号 | 示例值 | 说明 |
|---|---|---|---|
| 车辆质量 | m m m | 1500 kg | 车辆总质量 |
| 偏航转动惯量 | I z I_z Iz | 2500 kg·m² | 绕质心的惯量 |
| 前轴距 | l f l_f lf | 1.2 m | 质心到前轴距离 |
| 后轴距 | l r l_r lr | 1.3 m | 质心到后轴距离 |
| 轴距总长 | L = l f + l r L = l_f + l_r L=lf+lr | 2.5 m | 车辆轴距 |
| 前轮侧偏刚度 | C α f C_{\alpha f} Cαf | 80000 N/rad | 单位角度产生的侧向力 |
| 后轮侧偏刚度 | C α r C_{\alpha r} Cαr | 80000 N/rad | 同上 |
| 控制周期 | T T T | 0.1 s | 离散时间步长(用于仿真/MPC) |
📌 说明:
-
上述参数适用于中型轿车(如 Prius、Tesla Model 3 等);
-
若进行离散化建模(如用于 MPC),你还需要对矩阵 A , B A, B A,B 进行离散化(例如零阶保持 ZOH 方法):
A d = e A T , B d = ∫ 0 T e A τ d τ ⋅ B A_d = e^{A T},\quad B_d = \int_0^T e^{A \tau} d\tau \cdot B Ad=eAT,Bd=∫0TeAτdτ⋅B
第三章:曲线坐标系车辆模型(Curvilinear Coordinates Vehicle Model)
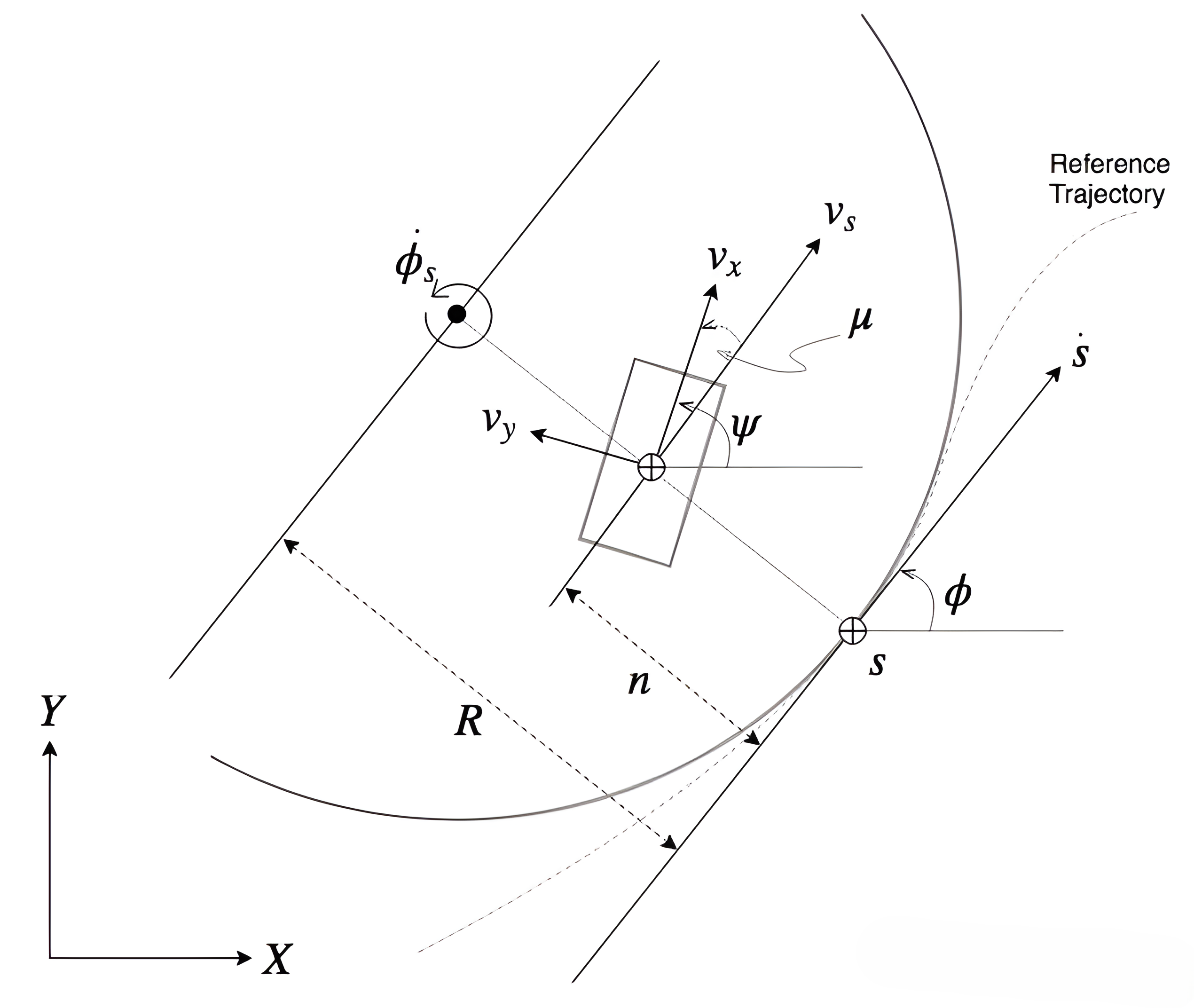
3.1 建模背景与坐标系定义
为了更准确地描述车辆在复杂路径上的跟踪误差,我们引入与参考轨迹绑定的Frenet-Serret 曲线坐标系。在该坐标系下,车辆位置、方向与速度等信息被投影到路径坐标系中,便于定义"与轨迹相关"的误差动态。
📌 坐标系定义:
- s s s:参考路径的弧长进度;
- n n n:车辆质心到参考曲线的横向偏移(正值代表车辆在右侧);
- ϕ s \phi_s ϕs:参考路径在 s s s 处的切线方向;
- φ \varphi φ:车辆实际航向角;
- u = φ − ϕ s u = \varphi - \phi_s u=φ−ϕs:航向误差;
- k ( s ) k(s) k(s):参考曲线在 s s s 处的曲率( R = 1 / k R = 1/k R=1/k)。
3.2 状态变量与控制输入定义
我们构建的状态空间模型如下:
✅ 状态向量:
x = s n μ v a δ δ ˙ \mathbf{x} = \begin{bmatrix} s \\ n \\ \mu \\ v \\ a \\ \delta \\ \dot{\delta} \end{bmatrix} x= snμvaδδ˙
| 符号 | 含义 |
|---|---|
| s s s | 跟踪进度(沿轨迹前进的弧长) |
| n n n | 横向误差(车辆质心与轨迹的垂直距离) |
| μ \mu μ | 航向误差(车辆与轨迹切线夹角) |
| v v v | 车辆质心速度 |
| a a a | 车辆纵向加速度 |
| δ \delta δ | 前轮转角 |
| δ ˙ \dot{\delta} δ˙ | 转角变化率 |
✅ 控制输入:
u = u jerk u δ ˙ \mathbf{u} = \begin{bmatrix} u_{\text{jerk}} \\ u_{\dot{\delta}} \end{bmatrix} u=ujerkuδ˙
| 控制量 | 含义 |
|---|---|
| u jerk u_{\text{jerk}} ujerk | 加加速度,控制纵向 jerk |
| u δ ˙ u_{\dot{\delta}} uδ˙ | 前轮角加速度 |
3.3 偏移角 β \beta β 定义与推导
由于车辆质心不在转向轮上,前轮转角 δ \delta δ 与车辆质心的运动方向之间存在夹角 β \beta β。其计算公式为:
β = tan − 1 ( l r l f + l r tan δ ) \beta = \tan^{-1} \left( \frac{l_r}{l_f + l_r} \tan \delta \right) β=tan−1(lf+lrlrtanδ)
其中:
- l f l_f lf:前轴到质心距离;
- l r l_r lr:后轴到质心距离;
- L = l f + l r L = l_f + l_r L=lf+lr:车辆轴距。
3.4 曲线坐标系下的非线性运动学模型
🔷 基于几何关系推导动态方程:
- 纵向进度变化率(弧长变化):
s ˙ = v cos ( μ + β ) 1 − n k ( s ) \dot{s} = \frac{v \cos(\mu + \beta)}{1 - n k(s)} s˙=1−nk(s)vcos(μ+β)
- 横向误差变化率:
n ˙ = v sin ( μ + β ) \dot{n} = v \sin(\mu + \beta) n˙=vsin(μ+β)
- 航向误差变化率:
μ ˙ = v l r sin β − k ( s ) v cos ( μ + β ) 1 − n k ( s ) \dot{\mu} = \frac{v}{l_r} \sin \beta - \frac{k(s) v \cos(\mu + \beta)}{1 - n k(s)} μ˙=lrvsinβ−1−nk(s)k(s)vcos(μ+β)
- 纵向速度与转向动态:
v ˙ = a , a ˙ = u jerk , δ ˙ = δ ˙ , δ ¨ = u δ ˙ \dot{v} = a, \quad \dot{a} = u_{\text{jerk}}, \quad \dot{\delta} = \dot{\delta}, \quad \ddot{\delta} = u_{\dot{\delta}} v˙=a,a˙=ujerk,δ˙=δ˙,δ¨=uδ˙
3.5 状态空间模型汇总表达
{ s ˙ = v cos ( μ + β ) 1 − n k ( s ) n ˙ = v sin ( μ + β ) μ ˙ = v sin β l r − k ( s ) v cos ( μ + β ) 1 − n k ( s ) v ˙ = a a ˙ = u jerk δ ˙ = δ ˙ δ ¨ = u δ ˙ \boxed{ \begin{cases} \dot{s} = \dfrac{v \cos(\mu + \beta)}{1 - n k(s)} \\ \dot{n} = v \sin(\mu + \beta) \\ \dot{\mu} = \dfrac{v \sin \beta}{l_r} - \dfrac{k(s) v \cos(\mu + \beta)}{1 - n k(s)} \\ \dot{v} = a \\ \dot{a} = u_{\text{jerk}} \\ \dot{\delta} = \dot{\delta} \\ \ddot{\delta} = u_{\dot{\delta}} \end{cases} } ⎩ ⎨ ⎧s˙=1−nk(s)vcos(μ+β)n˙=vsin(μ+β)μ˙=lrvsinβ−1−nk(s)k(s)vcos(μ+β)v˙=aa˙=ujerkδ˙=δ˙δ¨=uδ˙
3.6 模型特性与应用说明
- ✅ 优势 :
- 便于设计误差反馈控制器(如轨迹跟踪 LQR、MPC);
- 状态变量紧贴实际控制目标(误差最小化);
- 结构清晰,适合路径规划与控制统一建模。
- ⚠️ 局限 :
- 曲率 k(s)k(s)k(s) 需已知或可实时计算;
- 非线性较强,需配合线性化或数值方法求解。
3.7 模型结构总结
| 状态变量 | 控制变量 | 描述能力 |
|---|---|---|
| e y , e ψ , s e_y, e_\psi, s ey,eψ,s | δ \delta δ | 表示车辆相对于轨迹的几何误差 |
| + v v v(可选) | a a a(纵向控制) | 可加入纵向加速控制 |
第四章:三种车辆模型的对比分析与选择建议
本章将系统地从结构组成、建模精度、控制友好性、计算复杂度、适用场景等角度出发,比较以下三种常见车辆模型:
- 运动学模型(Kinematic Bicycle Model + Longitudinal Dynamics)
- 动力学模型(Dynamic Bicycle Model + Longitudinal Dynamics)
- 曲线坐标系模型(Curvilinear Coordinates Vehicle Model)
4.1 建模结构对比
| 模型 | 描述方式 | 是否建模轮胎力 | 是否考虑质心 | 是否建模偏航 |
|---|---|---|---|---|
| Kinematic | 几何关系 | ❌ | ✅ | ✅ |
| Dynamic | 牛顿力学 | ✅ | ✅ | ✅ |
| Curvilinear | 误差反馈 | ❌(隐式) | ✅ | ✅(与参考轨迹比较) |
4.2 控制友好性与离散化性能
| 模型 | 控制器设计适配性 | 离散化是否简单 | 是否适合线性化 |
|---|---|---|---|
| Kinematic | ✅ 适合 MPC、LQR | ✅(一阶 Euler 足够) | ✅ 小角度可线性化 |
| Dynamic | ⚠️ 控制器需处理非线性 | ⚠️ 需处理侧偏角和轮胎力关系 | ⚠️ 复杂,适合高保真建模 |
| Curvilinear | ✅ 误差驱动控制最优 | ✅(直接预测误差) | ✅(LQR/MPC 核心模型) |
4.3 适用速度范围与典型场景
| 模型 | 适用速度范围 | 典型应用 |
|---|---|---|
| Kinematic | 低速(0--30 km/h) | 路径规划,泊车控制 |
| Dynamic | 中高速(30--120 km/h) | 高速稳定控制,打滑建模 |
| Curvilinear | 全速度段(依赖参考轨迹) | 轨迹跟踪、LQR、MPC 控制 |
4.4 控制器适配建议
| 控制器类型 | 推荐模型 | 理由 |
|---|---|---|
| PID | Kinematic | 状态简单,反馈误差直接可用 |
| LQR | Curvilinear | 线性状态空间友好,误差形式直观 |
| MPC | Curvilinear / Kinematic | 离散化明确,预测窗口容易设置 |
| RL 强化学习 | Dynamic | 模拟更真实,适合端到端训练 |
4.5 总结对比表
| 维度 | Kinematic Model | Dynamic Model | Curvilinear Model |
|---|---|---|---|
| 模型复杂度 | ★☆☆(低) | ★★★(高) | ★★☆(中) |
| 控制器适配性 | ★★☆ | ★☆☆ | ★★★ |
| 精度与真实度 | ★☆☆ | ★★★ | ★★☆ |
| 计算效率 | ★★★ | ★☆☆ | ★★☆ |
| 易线性化性 | ★★★ | ★☆☆ | ★★★ |
| 轨迹跟踪能力 | ★★☆ | ★★★ | ★★★ |
4.6 总结建议
-
若你的控制器或系统工作在低速、规整环境(如停车、狭窄场景),推荐使用:
✅ Kinematic Bicycle Model
-
若希望追求真实响应、考虑车体惯性、轮胎侧偏影响等高保真模型,则推荐:
✅ Dynamic Bicycle Model
-
若任务为轨迹跟踪、需要误差驱动反馈、结合最优控制(LQR、MPC),则优选:
✅ Curvilinear Model