 目 录
目 录
摘 要 I
Abstract II
引言 4
1绪论 6
1.1研究的目的及意义 6
1.2 研究的现状 6
1.2.1 国外的研究现状 6
1.2.2国内研究的现状 9
1.3 下肢康复机器人未来的发展前景 10
1.4 本次设计主要研究内容 10
2下肢康复机器人步态分析 11
2.1 人体下肢步态分析 11
2.2 人体下肢康复运动分析 12
3下肢康复机器人机械结构设计 14
3.1下肢康复机器人材料选择 14
3.2下肢杆件长度范围 14
3.3下肢康复腿部的机构设计 14
3.4下肢康复电机的选型计算 15
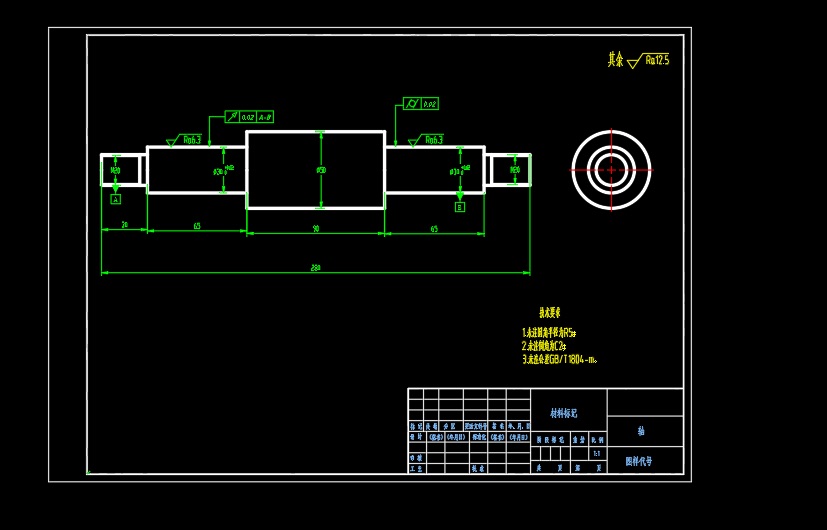
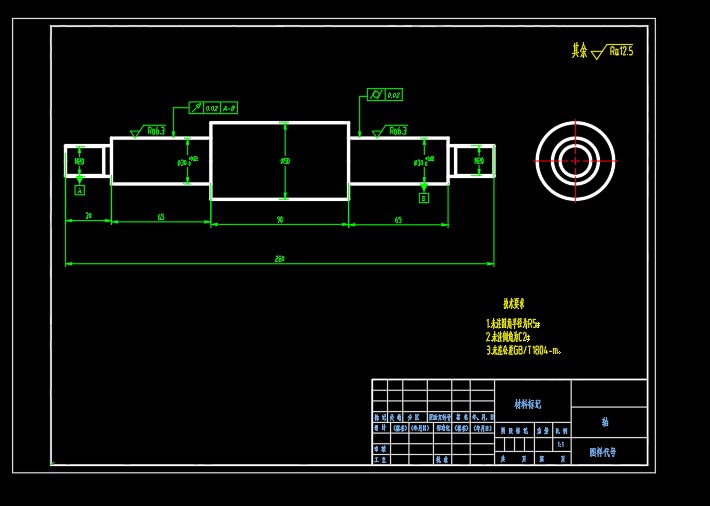
3.5肢康复模块转轴的设计 17
3.6下肢轴承的选型和校核 20
3.7直线导轨的选型和校核 21
4主要零部件的三维建模 25
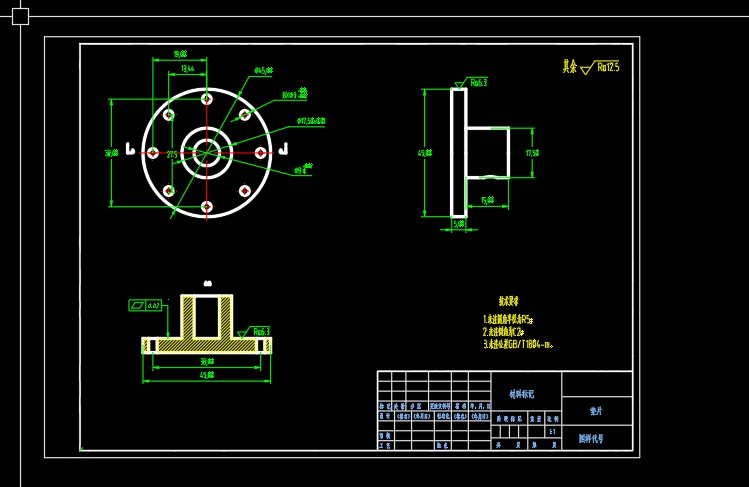
4.1下肢康复机器人的主要零部件三维图 25
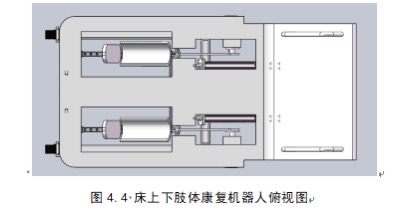
4.2装配体的三维模型 26
4.3装配体的爆炸图 27
4.4核心结构的motion分析 27
结论 29
文 献 参 考 30
致 谢 33
摘 要
随着我国人口的老龄化加剧,医疗和社会保险制度面临着前所未有的压力。长期卧床不起、瘫痪的老年人自理能力很差,因此他们需要有人来照顾他们。与此同时,因为各种疾病或者其他交通事故的原因,造成下肢运动障碍的患者数目也在增多。这些人的护理和康复是人口老龄化国家面临的共同问题。近年来,随着我国人口老龄化趋势的加剧和各种疾病的增多,越来越多的患者出现下肢功能障碍问题,严重影响了患者的正常生活,给社会和家庭带来了诸多麻烦。患者渴望尽快恢复健康,恢复正常生活。本文根据患者的需求和国内外发展现状,提出了一种新型的下肢康复机器人结构,帮助患者完成下肢康复,摆脱疾病。
经过对正常人的步态进行分析,完成了本次设计的下肢康复机器人的康复动作的设计。将设计完成的康复动作进行仿真分析,最终确定下肢康复的训练动作。设计的下肢康复机器人每条腿有三个自由度,其核心是曲柄滑块机构,通过曲柄滑块机构模拟出人体实际的运动轨迹,完成下肢患者的康复训练。本次设计的下肢康复机器人可以帮助下肢患者病人更好的进行康复训练,及早的恢复身体的机能,让患者更早的回归社会,减少人力资源的损失。
本文采用模块化的设计思路,仿真驱动设计的现代设计方法,完成了了下肢康复机器人的三维模型的绘制和主要零部件轴的设计和校核,设计的下肢康复机器人具有结构简单、康复动作有效的优点。
关键词:康复训练,机器人,结构设计,SolidWork
引言
我国脑卒中发病率整体呈上升趋势,40岁及以上人群患者高达1242万,每年新发脑卒中患者120万150万人,死亡者80万10万人,存活者致残糊莱约5%,此外,目前有约400万因年老而丧失行走能力的我疾老人,且日超严重的人口老龄化将导致下腋功能唯碍患者数量的进一步增加。由于我国医患比例不均衡问题的存在,患者下肢损伤后拔难进行及时、规范的健康治疗,且很难保证一定时长的康复训练,导致患者下胶极易留下严重的后遗症,影响塞者正常生活,也给家庭、社会带来沉里的经济和精神负担。
目前常见的可以有效改善患者下肢运动障碍的方式主要是通过人工按摩或者的一些简单的康复机械来完成。随着人们生活水平的提高,人们对生活的要求越来越高,一个健康的身体是越来越多人的期盼。下肢康复机器人训练系统不仅可以为患者提供安全可靠的肢体康复训练,还可以改善患者的心肺功能,减少肌肉萎缩防止长期卧床带来的并发症,同时减少脑部患者的后遗症,帮助患者更好的生活。更在向着智能化、便捷化的趋势发展。
目前对于医疗康复领域,我国的很多专家都进行了深入的研究,同时也取得了一些不错的成就。我国的很多研究机构关于康复机器人的研究主要可以分成三个部分,第一部分是上肢康复机构的设计、第二部分是下肢康复机构的设计,第三是上下肢康复机构的设计。随着研究的深入,我国的医疗研究机构对于康复机器人的研究也进入了一个崭新的阶段。研究的上肢康复机构大多都是完成上肢双臂的康复运动,其主要完成上肢的伸展、弯曲和复合运动。对于这三个部分来说,当前研究的重点是上下肢康复机构的设计,设计的康复机构中同时含有上肢和下肢的康复动作,这种机器的适用性更强,得到了一致好评。目前常见的上下肢康复机器人大多数都采用以床以主要载体,进行康复机构的设计,其主要的原因是因为大多数的肢体患者行动不便,难以维持日常的正常生活,大多数都是处于长期卧床的状态,因此以床为载体的康复机器人的研究具有更大的意义。
本文主要研究的是下肢康复机器人的结构设计,作为机械工业发展的延续,下肢康复机器人是机器人在医疗行业的重要研究,计划采用以床体位为基础的康复机构,以床体为基础对患者来说则更方便。本文主要通过分析现有的康复装置的特点,首先对人体的下肢的正常运动步态进行分析,得到人体正常行走时的下肢运动规律,在正常行走的规律基础上,设计研发出专门针对下肢运动障碍患者的下肢康复机器人。完成下肢康复动作的设计,对人体下肢的主要运动特点进行分析,完成了下肢康复机器人的主要机械结构的设计。经过仿真测试,设计的下肢康复机器人可以满足下肢患者的康复需求。
随着计算机技术的发展,本文采用一种新的机械设计方法,仿真驱动设计,采用solidwork和CAD软件完成下肢康复机器人的结构设计和仿真分析,将分析得到的结果进一步去优化产品的设计,这就是仿真驱动设计的核心。
1绪论
1.1研究的目的及意义
目前,随着社会的发展,人口结构老龄化的趋势逐渐加重,老年人生理功能的衰退与下肢病重患者及交通事故的增多,使大量人群存在下肢运动功能障碍,以致重新获得正常行走能力是下肢运动障碍患者的美好期望。数据表明,在我国每年因为交通事故造成的下肢运动障碍高达30万。临床医学表明,除必须的医学治疗外,科学和正确的康复训练对肢体功能的恢复也十分有效。下肢康复机器人训练系统不仅可以为患者提供安全有效的肢体运动训练,还可以改善患者的心肺功能,减少肌肉萎缩以及防止因长期卧床而带来的诸多并发症。同时,脑卒中患者病发后越早进行康复训练,越能有效地减少后遗症、降低患者的致残率,帮助患者更好地回归社会。因此,下肢康复机器人具有重大的研究意义。
本次设计下肢康复机器人的主要作用是帮助下肢运动障碍的患者进行康复训练,通过康复机器人的模拟运动的动作,对人体的下肢进行锻炼,可以有效减少下肢运动障碍带来的痛苦,尽快的将病人从下肢运动障碍中解救出来。本文利用仿生原理,结合人体工程学进行拟人化设计,通过标准的重复运动,刺激神经系统,恢复下肢运动功能。
1.2 研究的现状
上世纪80年代开始,机器人逐渐进入人们的视野,越来越多的机器人应用在工业领域,推动者科技的发展,同时机器人也是科技发展的产物。二十一世纪以来,机器人逐渐进入医疗行业,各种医疗机器人和医疗辅助机器人层出不穷,极大的推动了医疗行业的发展。目前来说,医疗康复机器人研究成果最多的国家在北美和欧洲地区,我国相比于外国来说,研究的时间比较短,取得的成就也比较有限,但是目前我国很多医疗机构都加入了医疗康复机器人的研究之中,推动着我国机器人事业的发展。
1.2.1 国外的研究现状
医疗机器人的最早研究就是在国外进行的,主要是在欧洲地区,这里大部分都是发达国家,经历了人口老龄化发展的过程。外国因为人口老龄化的问题,下肢运动障碍的患者数目比较多,他们对于下肢康复机器人的研究时间比较长,同时也取得了一些不错的成绩。在下肢康复机器人的
本人从事十多年模具设计师与模具制造 模具设计、高级工程师本人设计CAD 二维工程图 三维工程图 产品设计 逆向建模 51单片机 STM32 单片机 代码 实物 原理 v2v9v9v1v2v9v3v1v9v6v