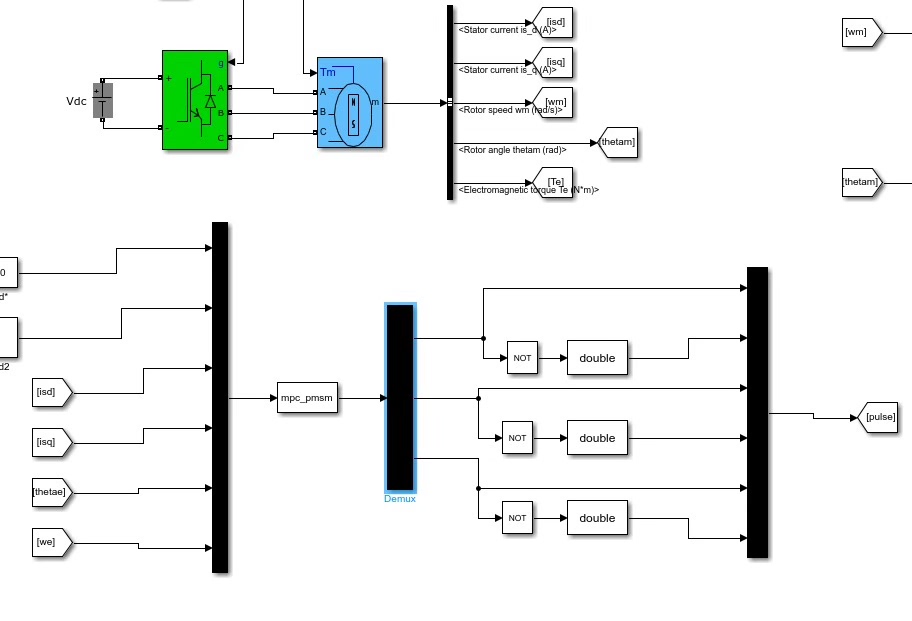
1.模型预测永磁同步电机控制 2.LADRC永磁同步电机控制 3.模糊永磁同步电机控制 4.无传感器永磁同步电机控制 #永磁同步电机
永磁同步电机的控制策略就像调教一匹汗血宝马,不同路况需要不同的缰绳握法。今天咱们就掰开揉碎了聊聊几种常见控制方法的实战技巧,手把手教你用代码驯服这匹"电磁骏马"。
预测控制玩转动态响应
模型预测控制(MPC)这招特别适合需要快速动态响应的场景,比如电动汽车的急加速。核心思路就是边跑边算,提前预判未来几步的动作。下面这段Python伪代码展示了基本的预测框架:
python
def mpc_controller(current_state, reference):
horizon = 5 # 预测步长
optimal_u = None
min_cost = float('inf')
for candidate_u in generate_control_candidates():
predicted_states = []
x = current_state
for u in candidate_u:
x = motor_model(x, u) # 电机状态方程
predicted_states.append(x)
cost = calculate_cost(predicted_states, reference)
if cost < min_cost:
min_cost = cost
optimal_u = candidate_u[0] # 仅取首个控制量
return optimal_u这个滚动优化的套路每步都在线计算,虽然吃算力但响应快。实测时要注意电机模型的准确性,建议先用离线参数辨识打好基础。
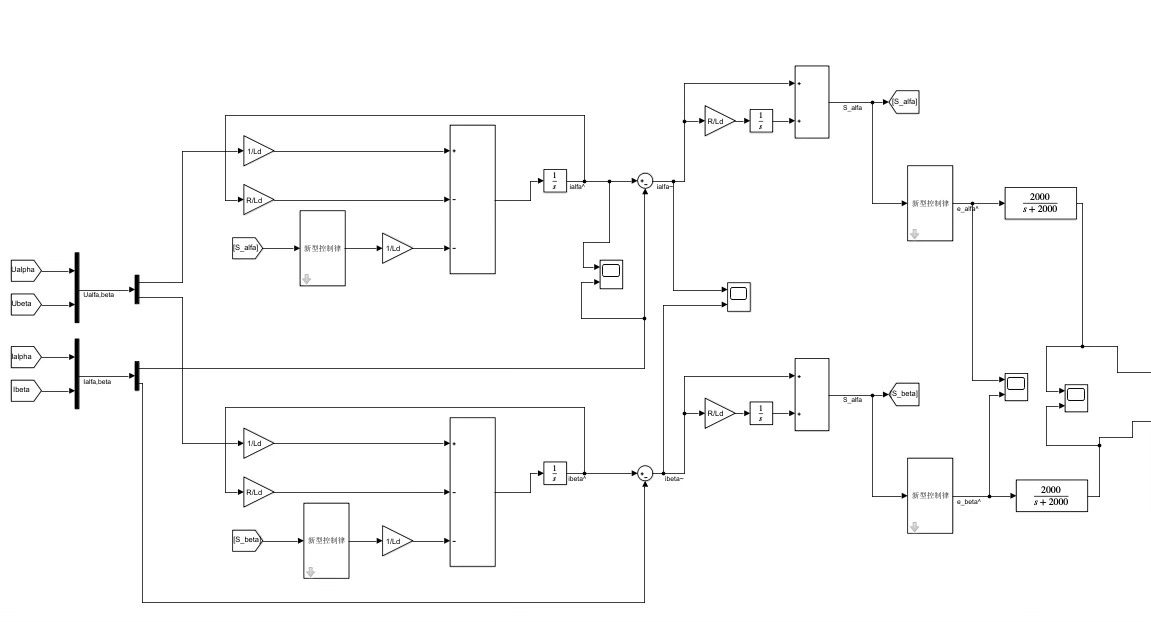
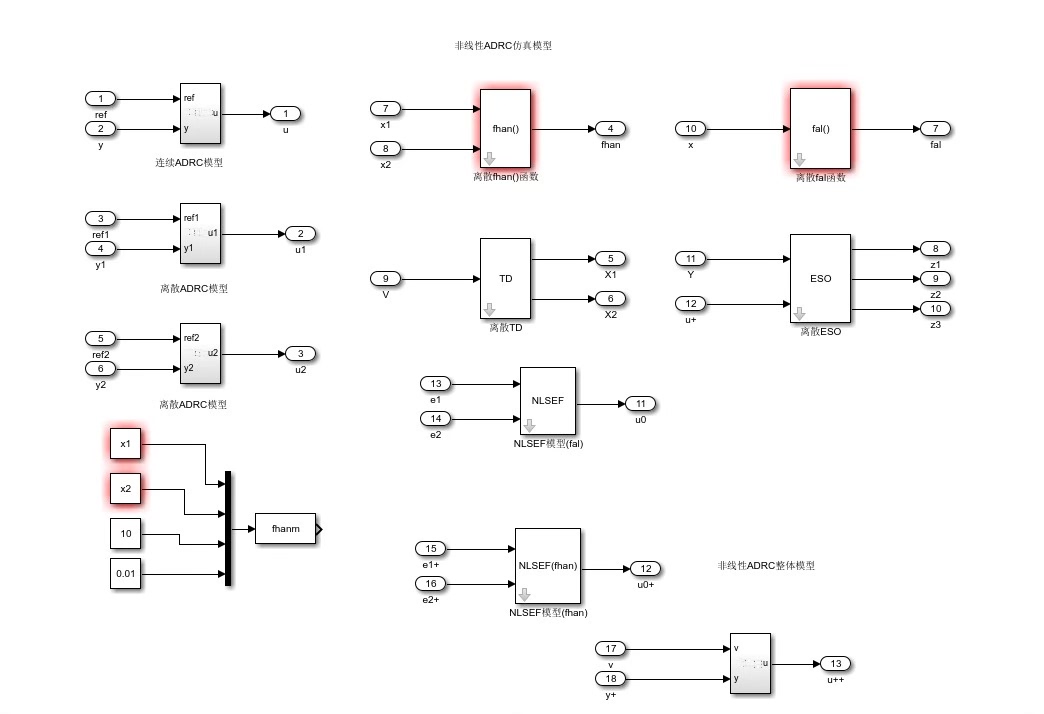
自抗扰控制硬刚干扰
LADRC就像给电机装了减震器,对付负载突变有奇效。重点在于扩张状态观测器(ESO),它能实时捕捉各种扰动。看这段Simulink代码片段你就明白观测器的玄机了:
matlab
function [z1, z2] = ESO(u, y)
beta01 = 100; % 观测器带宽
beta02 = 300;
dt = 0.0001; % 控制周期
persistent z1_prev z2_prev
if isempty(z1_prev)
z1_prev = 0; z2_prev = 0;
end
e = y - z1_prev;
dz1 = z2_prev + beta01*e;
dz2 = beta02*e + u;
z1 = z1_prev + dz1*dt;
z2 = z2_prev + dz2*dt;
z1_prev = z1;
z2_prev = z2;
end调试时重点调beta系数,太小跟踪慢,太大容易振荡。建议从电机额定转速的3-5倍开始试,别上来就怼大参数。
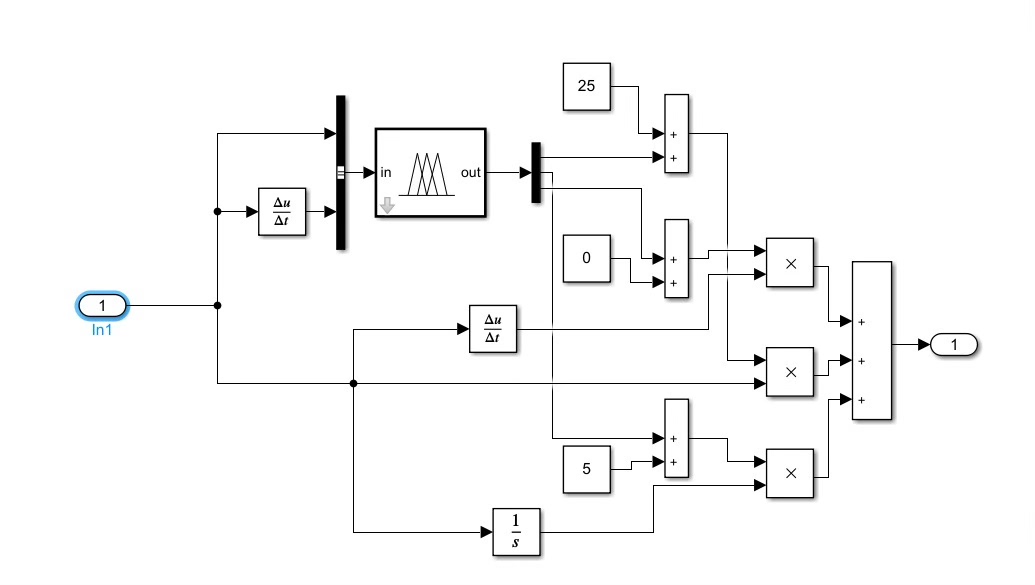
模糊控制搞定非线性
当电机运行在复杂工况时,模糊控制就像老司机的经验判断。下面这个模糊规则库设置很有意思:
python
import skfuzzy as fuzz
e = fuzz.trimf(np.arange(-1,1,0.1), [-0.5, 0, 0.5])
de = fuzz.gaussmf(np.arange(-2,2,0.1), 0, 0.3)
# 经验规则库
rule1 = np.fmin(e['负'], de['正']), '输出大正'
rule2 = np.fmin(e['零'], de['零']), '维持当前'
...调试时别死磕理论,多靠实际波形调整隶属函数。见过有工程师用"削土豆"法------先把范围设宽,再逐步削窄调整。记得给输出量加个限幅,防止积分饱和。
无传感器控制的隐身术
省掉位置传感器就像玩隐身术,关键要玩好转子位置观测。这个滑模观测器的代码暗藏玄机:
c
// 滑模观测器核心计算
void SMO_Update(float Ia, float Ib, float Ualpha, float Ubeta) {
float e_alpha = Ialpha_est - Ia;
float e_beta = Ibeta_est - Ib;
// 滑模切换函数
float z_alpha = e_alpha > 0 ? 1 : -1;
float z_beta = e_beta > 0 ? 1 : -1;
// 反电动势估算
Ealpha = -Ld*z_alpha + Rs*Ia;
Ebeta = -Lq*z_beta + Rs*Ib;
// 位置解算
theta_est = atan2(-Ealpha, Ebeta);
}实际应用时要加低通滤波,但截止频率设太低会导致相位滞后。有个小技巧是用自适应滤波,根据转速动态调整截止频率,实测能让转速波动降低40%以上。
调试这些算法时,建议先拿电流环开刀。见过新手直接调速度环,结果被耦合效应折腾得怀疑人生。记住先内环后外环,先静态后动态的黄金法则。用STM32的话,注意ADC采样时刻对齐PWM中点,否则电流纹波能让你哭出来。
这些控制策略没有绝对优劣,关键看应用场景。预测控制在多目标优化时很香,自抗扰适合扰动多的场合,模糊控制在非线性强的场景吃香,无传感器方案则是成本敏感型应用的首选。就像炒菜讲究火候,控制算法也得看菜下饭。