基于睿尔曼的官方技术文档顺利完成了机械臂的手眼标定流程。总体流程非常顺利,代码几乎不需要做较大的调整。
关于官方的手眼标定文档:
https://develop.realman-robotics.com/AI/developerGuide/hand/
手眼标定的官方github项目:
https://github.com/RealManRobot/hand_eye_calibration
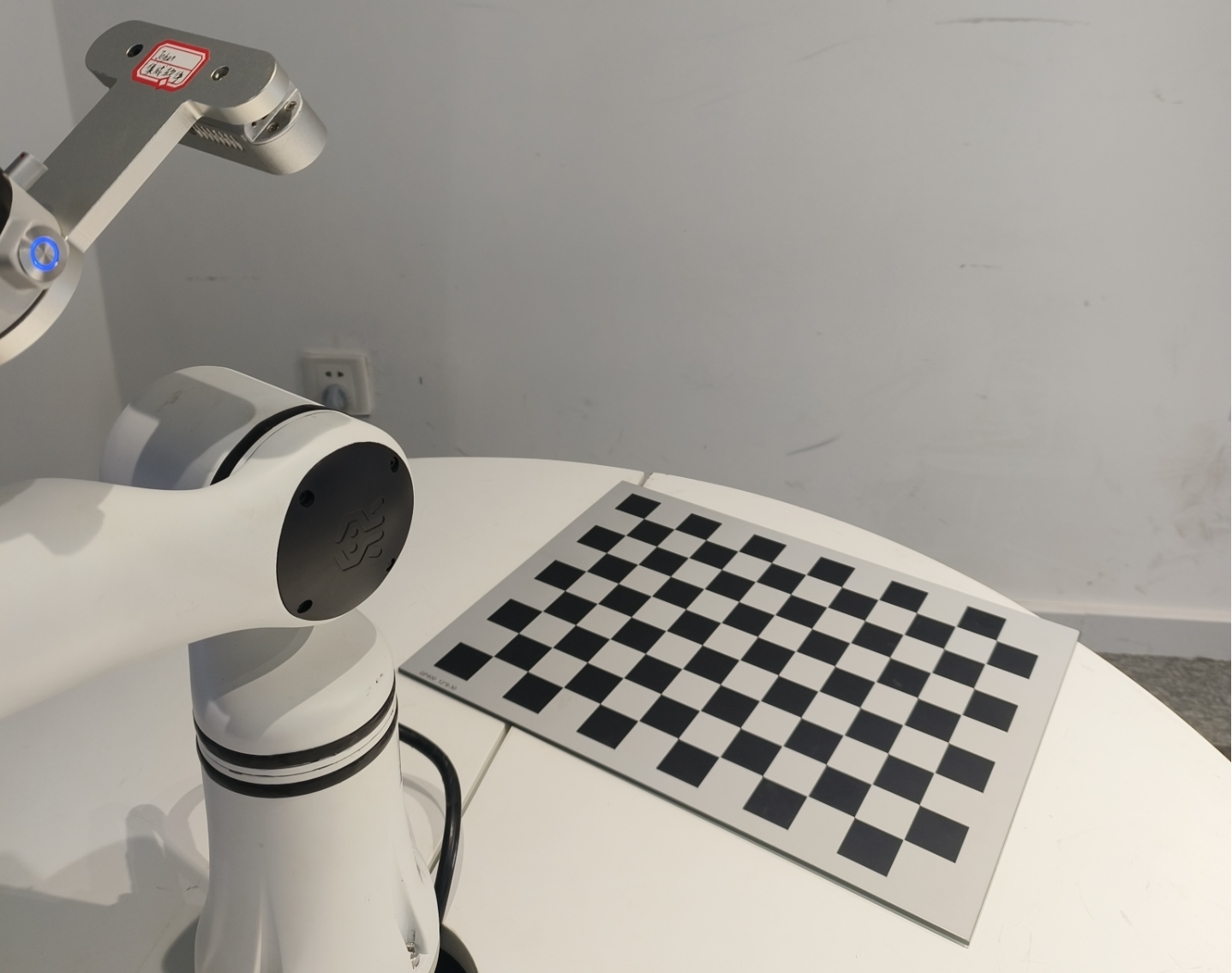
1. 硬件准备
睿尔曼机械臂型号:RM_75(sdk查询)
腕部realsense深度相机;
2. 环境准备
运行平台:rk3588
系统:ubuntu20.04
具体流程:参考github的readme
机械臂性高查询
python 第三方库安装:
pip install Robotic_Arm调用sdk查询型号
from Robotic_Arm.rm_robot_interface import *
# 初始化为三线程模式
arm = RoboticArm(rm_thread_mode_e.RM_TRIPLE_MODE_E)
# 创建机械臂连接,打印连接id
handle = arm.rm_create_robot_arm("192.168.1.18", 8080)
print(handle.id)
# 获取机械臂型号、末端力传感器版本及自由度信息
print(arm.rm_get_robot_info())
# 删除指定机械臂对象
arm.rm_delete_robot_arm()输出:

