原创程序,请勿翻卖,只有作者才最了解自己的程序,可提供讲解
文章目录
程序简介
概览
本程序是路径规划与定位代码。在路径规划端引入 APF 细化,以便在保持可达性的同时优化轨迹形状。完成A*+APF二维栅格路径规划后,将规划路径点作为运动轨迹真值,在每个路径点处模拟AOA + TDOA定位,最终输出定位结果。
路径规划模型
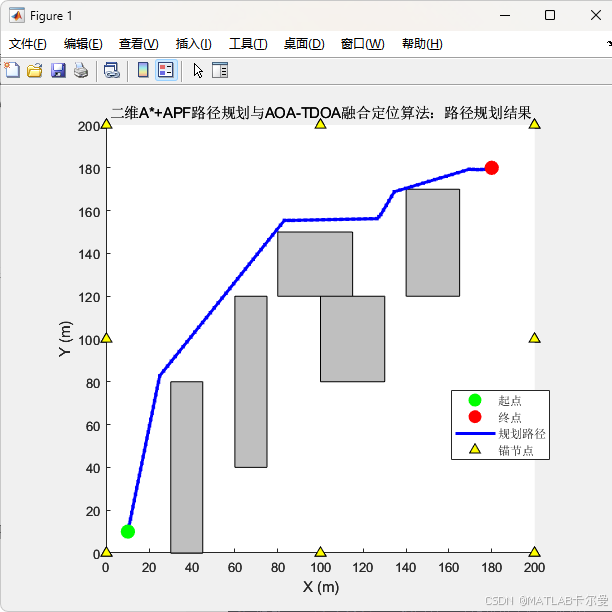
本程序采用 A* 与 APF 串联的混合规划结构。首先利用 A* 在二维栅格地图上完成全局搜索,得到一条严格避障的引导路径;随后对引导路径进行稠密化,并基于人工势场法引入三类局部作用力:
- 相邻路径点之间的平滑力,用于减弱折线感;
- 指向终点的吸引力,用于保持整体前进方向;
- 障碍物附近的斥力,用于主动远离矩形障碍物边界。
每次 APF 修正都会重新检查与前后路径段的碰撞关系,仅接受仍然满足避障约束的更新,因此可以在不破坏全局可达性的前提下优化路径形状。
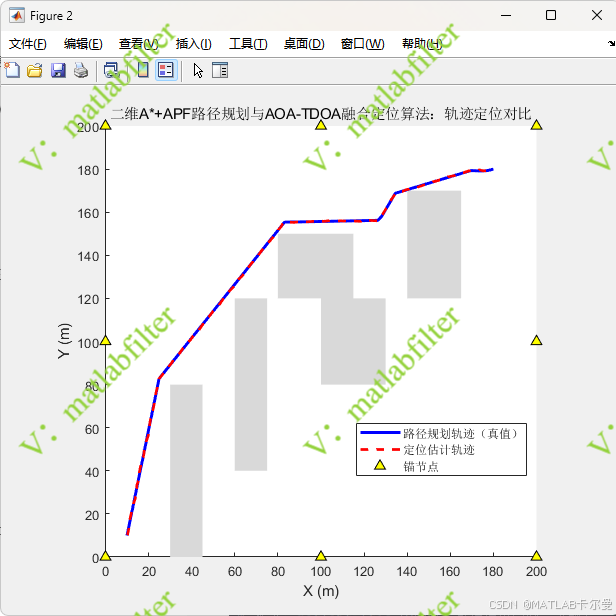
定位模型
AOA-TDOA 融合定位部分与原版本保持一致。程序将 AOA 角度残差与 TDOA 距离差残差拼接为同一个最小二乘问题,再用 Gauss-Newton 迭代完成联合定位。
运行结果
运行程序,会完成 二维A*+APF路径规划与AOA-TDOA融合定位算法 仿真。程序先在二维平面上生成避障路径,再沿路径点执行 AOA + TDOA 定位,并输出轨迹、坐标分量和定位误差统计。
真实截图
程序运行后会通过普通 figure; 命令生成图像窗口,主要包括:
路径规划结果图:
路径规划轨迹与定位估计轨迹对比图:
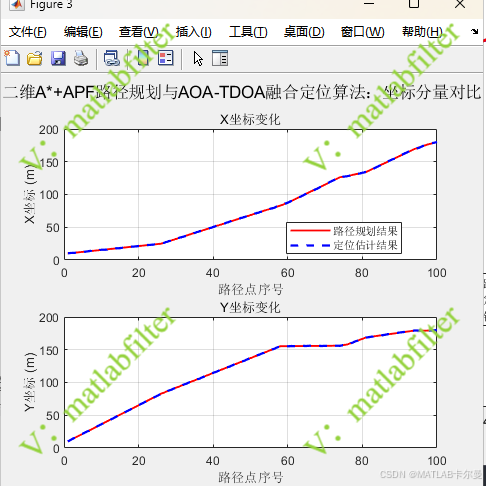
各坐标分量随路径点序号变化曲线:
定位误差曲线:
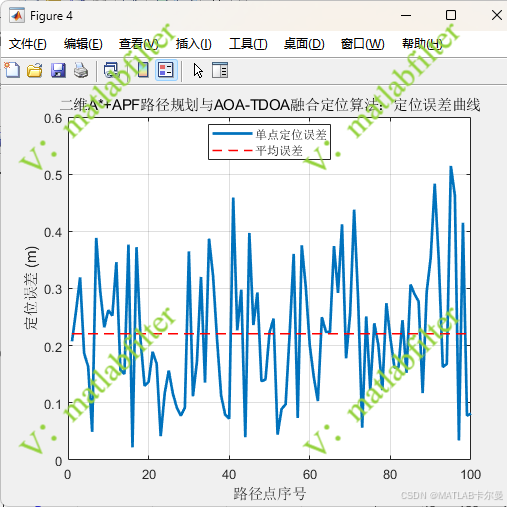
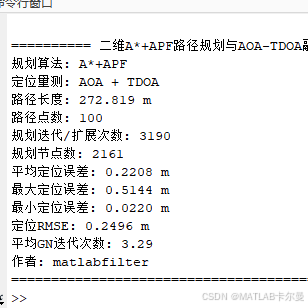
命令行会输出路径长度、路径点数、规划迭代次数、平均定位误差、最大定位误差、最小定位误差和 RMSE 等统计结果。
MATLAB源代码
部分代码如下:
matlab
%% 二维A*+APF路径规划与AOA-TDOA融合定位算法
% 作者: matlabfilter(V同号,可联系获取例程,代码定制、讲解)
% 2026-06-11/Ver2
clear; clc; close all;
rng(0);
%% 参数设置
algorithmName = '二维A*+APF路径规划与AOA-TDOA融合定位算法';
measureName = 'AOA + TDOA';
sigmaAngle = 0.012; % AOA角度噪声,单位rad
sigmaTdoaRange = 0.45; % TDOA距离差噪声,单位m
maxGnIter = 14; % Gauss-Newton最大迭代次数
%% 路径规划
[rawPath, anchors, mapLimit, obstacles, planStats] = planAstarApf2D();
%% 沿规划轨迹进行定位仿真
[estPath, posErr, iterUsed] = runAoaTdoaLocalization2D(rawPath, anchors, sigmaAngle, sigmaTdoaRange, maxGnIter, mapLimit);
%% 结果绘图与输出
plotPlanningResult(rawPath, anchors, mapLimit, obstacles, algorithmName);
plotLocalizationResult(rawPath, estPath, anchors, obstacles, mapLimit, algorithmName);
plotCoordinateResult(rawPath, estPath, algorithmName);
plotErrorResult(posErr, algorithmName);
printSummary(rawPath, posErr, iterUsed, planStats, algorithmName, measureName);完整代码也可点击下面的链接获取:
https://download.csdn.net/download/callmeup/92972700
可扩展方向
例程可向以下方向扩展:
-
面向复杂障碍环境的A*+APF联合路径规划优化方法
-
基于AOA-TDOA融合的移动目标轨迹定位算法
-
路径规划与无线定位联合优化方法研究
-
考虑锚节点几何布局的AOA-TDOA定位精度分析
-
基于Gauss-Newton迭代的AOA-TDOA非线性定位优化
-
基于自适应权重的AOA-TDOA联合定位算法
-
复杂地图环境下的路径规划与定位误差耦合分析
-
面向机器人导航的路径规划与融合定位一体化算法
-
基于CRLB的AOA-TDOA融合定位性能下界分析
-
动态障碍物环境下的A*+APF实时路径重规划方法
-
基于地图约束的AOA-TDOA定位误差修正方法
-
面向复杂传播环境的AOA-TDOA误差建模与补偿方法
如需帮助,或有导航、定位滤波相关的代码定制需求,可从个人主页左侧联系我