目录
1.摘要
车---无人机协同路径问题能提升物流效率,但变体多、约束强,启发式算法难以人工设计。本文提出 LLM-VD将LLM的代码生成能力与进化计算结合,通过结构化提示自动生成、演化、评估启发式算法。核心创新是两类自调试机制:一类把失败反馈注入后续提示,避免重复错误;另一类把失败代码与反馈一起交给模型修复。
关键词:LLM;自动启发式设计;自调试;车---无人机协同路径
2.相关工作
车---无人机协同路径
VDCRP 通常分为单车单机(SVSD)、单车多机(SVMD)和多车多机(MVMD)。求解思路多为分解:先建车辆路径,再嵌入无人机任务,复杂度随车辆和无人机数量上升而显著增加。
LLM 驱动的自动启发式设计
LLM 在优化中可充当优化器、预测器、特征提取器和算法设计器。与进化计算结合后,LLM 负责生成程序或规则,进化框架负责筛选、交叉和变异。
3.问题描述
本文不把数学模型作为直接求解对象,而是用它规定启发式生成的目标、可行性和评价标准。正文以 SVSD 为基本场景,
SVSD 中一辆车和一架无人机从同一仓库出发并返回。每个客户只能服务一次,可由车辆直接服务,也可由无人机从车辆某节点起飞、服务客户后在后续车辆节点会合。目标是最小化车辆或无人机中最晚返回仓库时间:
min max { t c + 1 , t c + 1 ′ } \min \max\{t_{c+1},\ t'_{c+1}\} minmax{tc+1, tc+1′}
输入为客户坐标、需求、车辆/无人机时间矩阵、无人机容量和续航;输出为车辆路径和无人机出动集合;目标为最小化 makespan。
4.LLM-VD
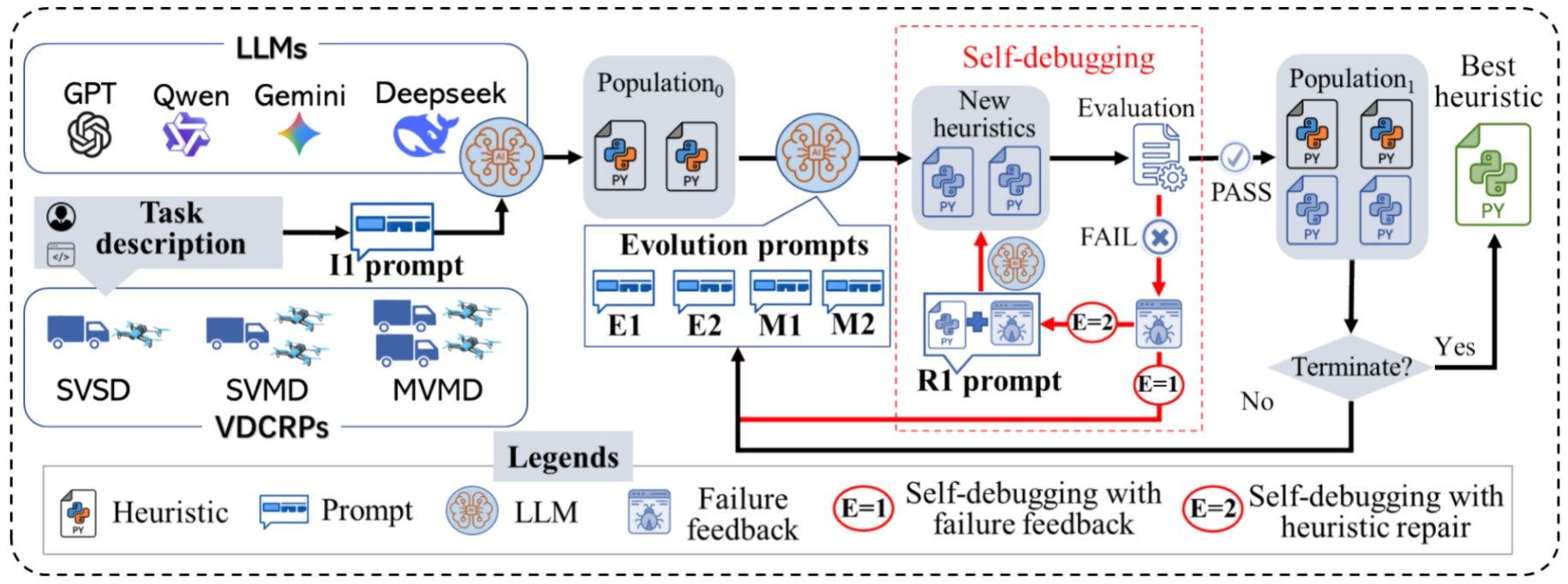
LLM-VD 维护规模为 (N) 的启发式种群 (P)。初始化阶段反复调用 I1 提示,只有通过评估的启发式才能进入种群。每代使用 E1、E2、M1、M2 生成候选:E1/E2 基于两个父代偏探索,M1/M2 基于单个个体偏修改。评估返回平均目标值相反数:
s c o r e = − 1 ∣ I ∣ ∑ i ∈ I o b j i score=-\frac{1}{|I|}\sum_{i\in I} obj_i score=−∣I∣1i∈I∑obji
若候选失败,框架按自调试模式处理;若成功,则并入种群。种群超出 (N) 时保留得分最高的个体,循环到最大代数后输出最优启发式。
启发式评估与自调试
评估器在所有实例上运行启发式,并统一检查返回格式、车辆路径、客户覆盖、重复访问、无人机容量、续航、目标函数计算和运行异常。
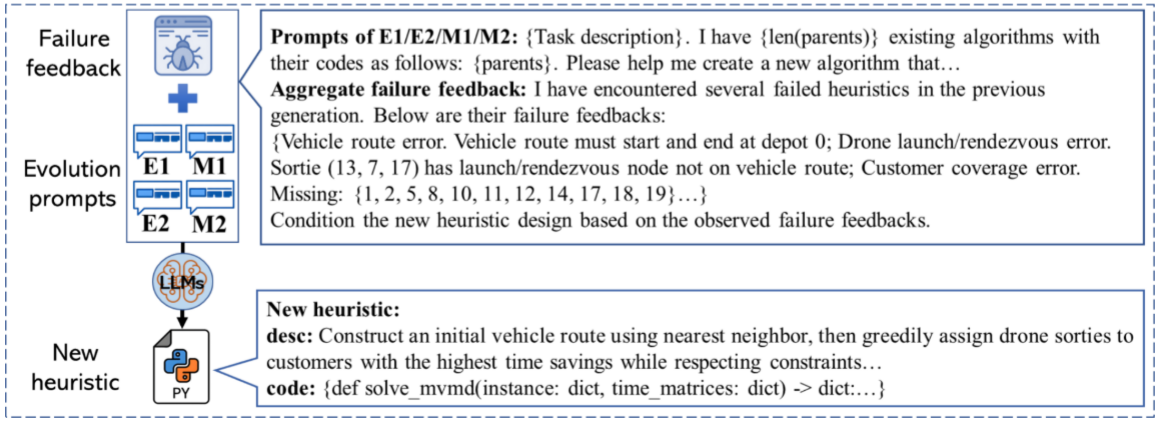
自调试有两种互斥模式。SDFF((E=1))收集上一代失败原因,把格式错误、覆盖错误、容量/续航违反、运行异常等反馈注入下一代提示,成本低,适合减少重复错误。
提示策略
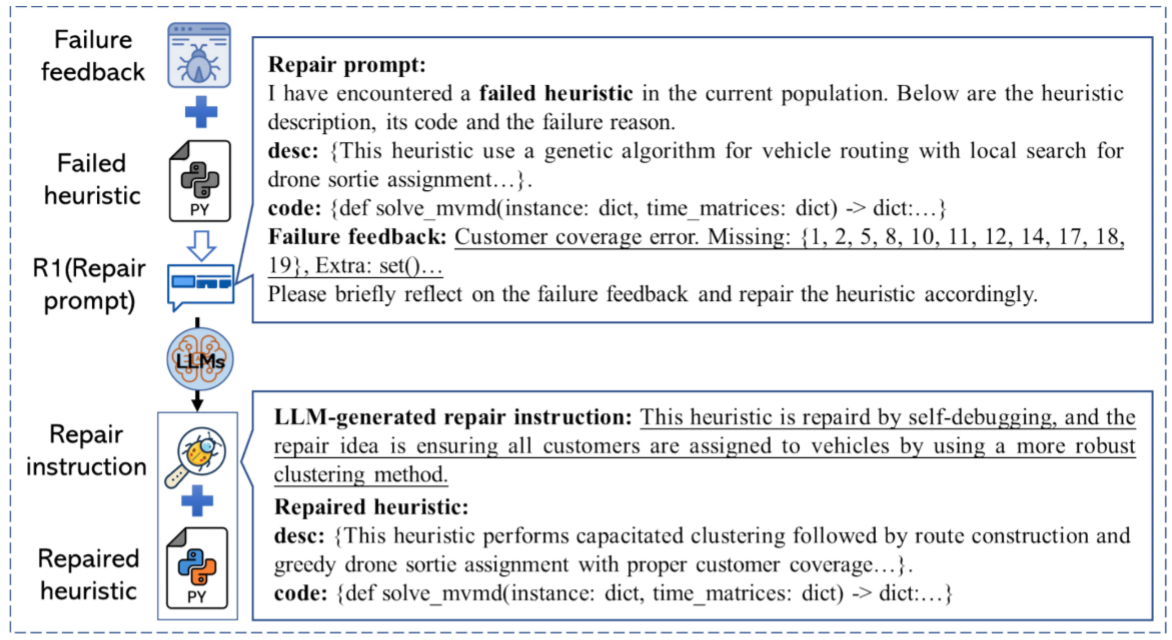
**提示由任务描述、父代启发式、失败反馈、期望输出和备注组成。**I1 生成初始算法;E1 要求产生与父代明显不同的新算法;E2 先抽取父代共同骨架再创新;M1 改变算法步骤或逻辑;M2 调整关键参数;R1 根据失败代码和反馈做定向修复。
5.数值实验
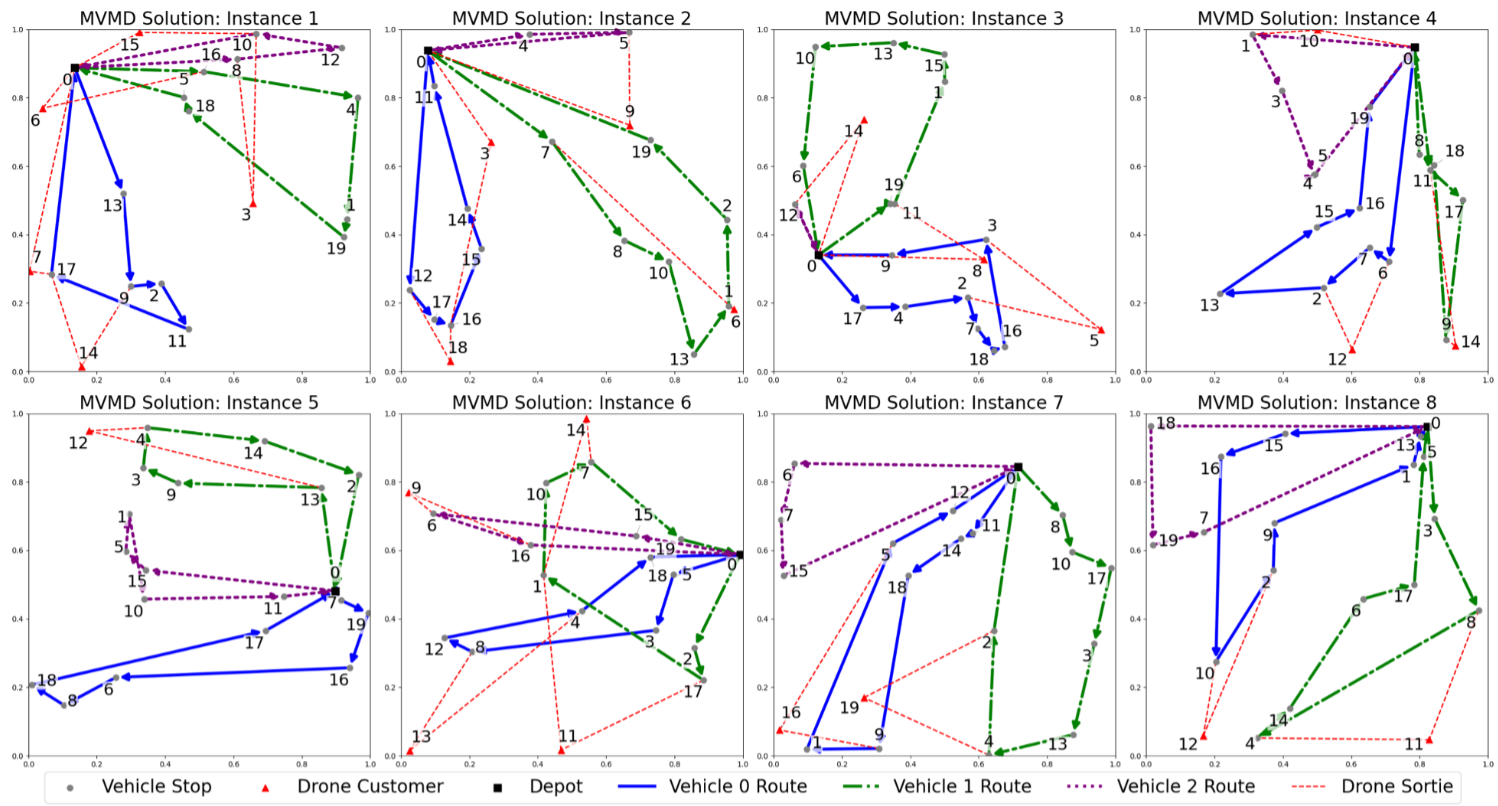
实验为 SVSD、SVMD、MVMD 各生成 8 个测试实例,仓库为节点 0。车辆距离采用曼哈顿距离,无人机距离采用欧氏距离。
将 SVSD_SDHR 与经典 FSTSP 基线比较,指标为 makespan,改进率为:
g a p = F S T S P B a s e l i n e − S V S D S D H R F S T S P B a s e l i n e × 100 % gap=\frac{FSTSP_{Baseline}-SVSD_{SDHR}}{FSTSP_{Baseline}}\times100\% gap=FSTSPBaselineFSTSPBaseline−SVSDSDHR×100%
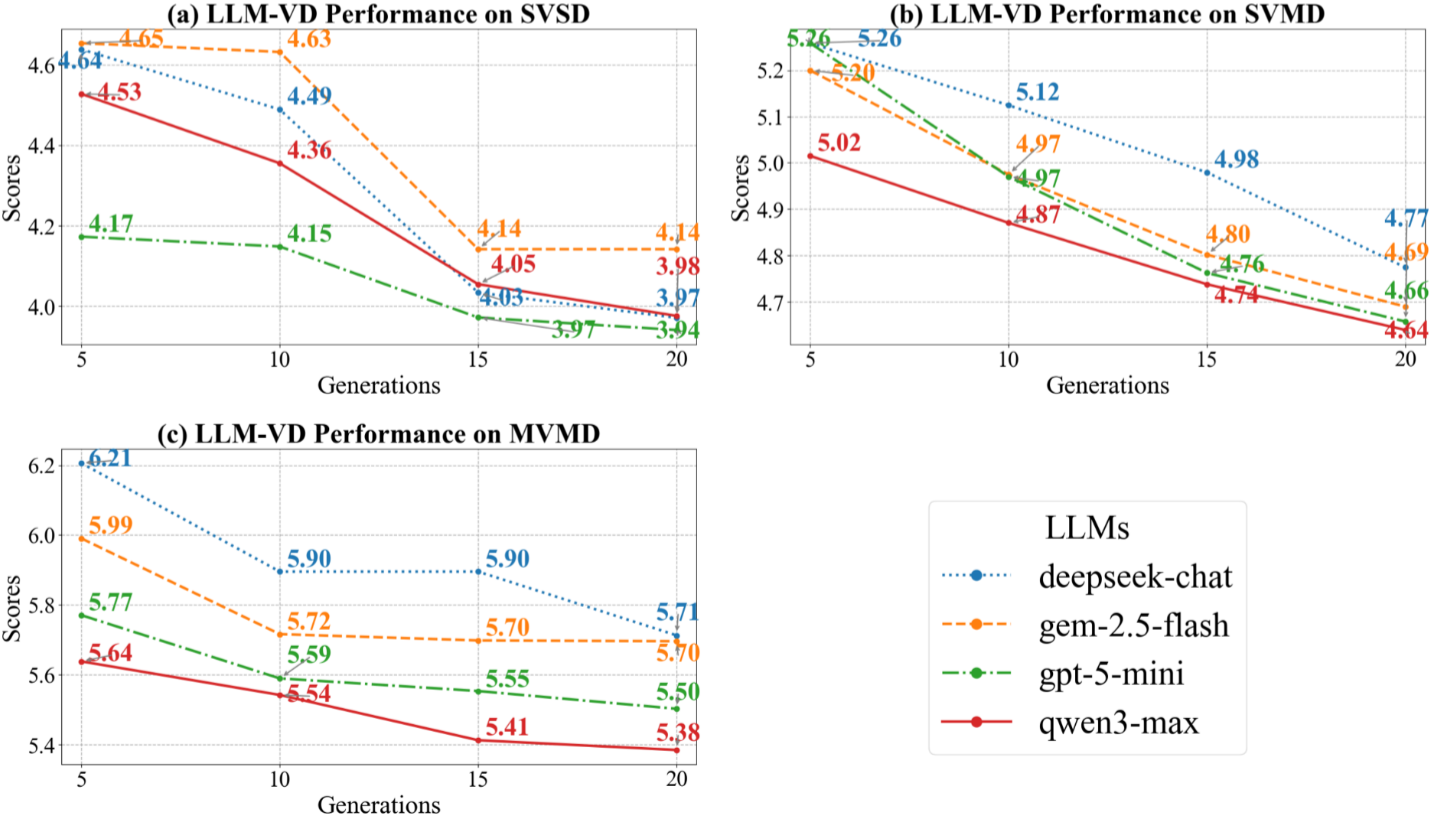
四个模型在三类问题上都能随代数推进降低得分,说明进化框架本身有效。qwen3-max 总体最稳,在 SVMD 和 MVMD 上最好,最终得分分别为 4.64 和 5.38;gpt-5-mini 在 SVSD 上最好,得分 3.84,在复杂变体上仅次于 Qwen;deepseek-chat 稳定但后期改进较弱;gemini-2.5-flash 后期提升有限。结果说明 LLM-VD 可跨模型工作,但最终质量依赖模型对结构化算法组件的推理和改写能力。
结论
LLM-VD用结构化提示把 VDCRP 转换为 LLM 可理解、可执行、可评估的启发式生成任务,并用进化计算持续改进。两种自调试机制分别从失败模式和失败代码中提取信息,使 LLM 能避免重复错误或修复近可行算法。
6.参考文献
Shi H, Zhen L. LLM-based automatic heuristic design for vehicle-drone collaborative routing problemsJ. Transportation Research Part E: Logistics and Transportation Review, 2026, 209: 104760.
7.算法辅导·应用定制·读者交流
xx