文章目录
-
- 每日一句正能量
- 一、前言:当智能体仰望"星辰大海"
- 二、系统架构设计
-
- [2.1 技术架构全景](#2.1 技术架构全景)
- 三、核心组件实战
-
- [3.1 天文数据模型(AstronomyDataModel.ets)](#3.1 天文数据模型(AstronomyDataModel.ets))
- [3.2 实时星图渲染引擎(StarMapRenderer.ets)](#3.2 实时星图渲染引擎(StarMapRenderer.ets))
- [3.3 深空目标智能识别(DeepSpaceRecognizer.ets)](#3.3 深空目标智能识别(DeepSpaceRecognizer.ets))
- [3.4 多设备协同观测(MultiDeviceObservation.ets)](#3.4 多设备协同观测(MultiDeviceObservation.ets))
- [3.5 悬浮观测导航(ObservationFloatNav.ets)](#3.5 悬浮观测导航(ObservationFloatNav.ets))
- 四、沉浸光感与观测时段的协同设计
-
- [4.1 观测时段光效映射](#4.1 观测时段光效映射)
- [4.2 悬浮导航观测状态徽章](#4.2 悬浮导航观测状态徽章)
- 五、关键技术总结
-
- [5.1 天文计算引擎开发清单](#5.1 天文计算引擎开发清单)
- [5.2 深空目标识别开发清单](#5.2 深空目标识别开发清单)
- [5.3 多设备协同观测开发清单](#5.3 多设备协同观测开发清单)
- [5.4 沉浸光感实现清单](#5.4 沉浸光感实现清单)
- 六、调试与性能优化建议
- 七、结语

每日一句正能量
守住隐私的边界,就是守住人与人之间最舒服的相处模式。
再亲密的关系,也需要各自的角落。不追问、不越界、不把自己的事强加给对方,反而能让彼此更轻松地长久相处。
把有限的精力和心力,真正投注在对自己重要的事情上。
一、前言:当智能体仰望"星辰大海"
2026年,天文观测与深空探索正经历AI驱动的革命性变革。从詹姆斯·韦伯太空望远镜(JWST)的深空影像到盖亚(Gaia)星表的十亿恒星数据,从引力波探测到暗物质分布测绘,天文数据的爆炸式增长对智能分析提出了前所未有的挑战。2026年2月,我国科学家发布"极致深空图"------基于AI模型的天文观测成果,刷新了深空探测极限。
然而,当前天文观测平台面临的核心矛盾是:数据海量但分析工具割裂 ------星图渲染、天体识别、光谱分析、轨道计算等工具分散在不同平台,缺乏统一的智能编排与协作能力。HarmonyOS 6(API 23)的HMAF(HarmonyOS Multi-Agent Framework)框架,结合**悬浮导航(Float Navigation)与沉浸光感(Immersive Light Effects)**特性,为PC端天文观测与深空探索带来了"星图即氛围、观测即光效"的全新交互范式。
本文将实战构建「星图罗盘」------一个基于实时星图渲染、深空目标智能识别、多设备协同观测、AI天体物理分析的PC端智能体天文观测协作平台。
本文核心亮点:
- 实时星图渲染引擎:基于WebGL的十亿恒星实时渲染,支持ICRS坐标系转换与星历表计算
- 深空目标智能识别:基于端侧大模型的天体识别与分类,支持星系/星云/星团/超新星等
- 多设备协同观测:基于分布式软总线的望远镜阵列协同,实现多机位同步观测
- AI天体物理分析:基于光谱分析、光变曲线、轨道力学的智能体自动分析
- 悬浮观测导航:底部悬浮导航栏实时显示观测目标、跟踪状态、曝光进度
- 沉浸光感星空氛围:根据观测时段(黄昏/深夜/黎明)动态切换环境光色与星空密度
- HMAF天文智能体集群:9大天文Agent协同完成星图编排、目标识别、观测调度、天体分析
二、系统架构设计
2.1 技术架构全景
「星图罗盘」采用五层架构设计,从系统能力层到应用层逐层构建天文观测能力:
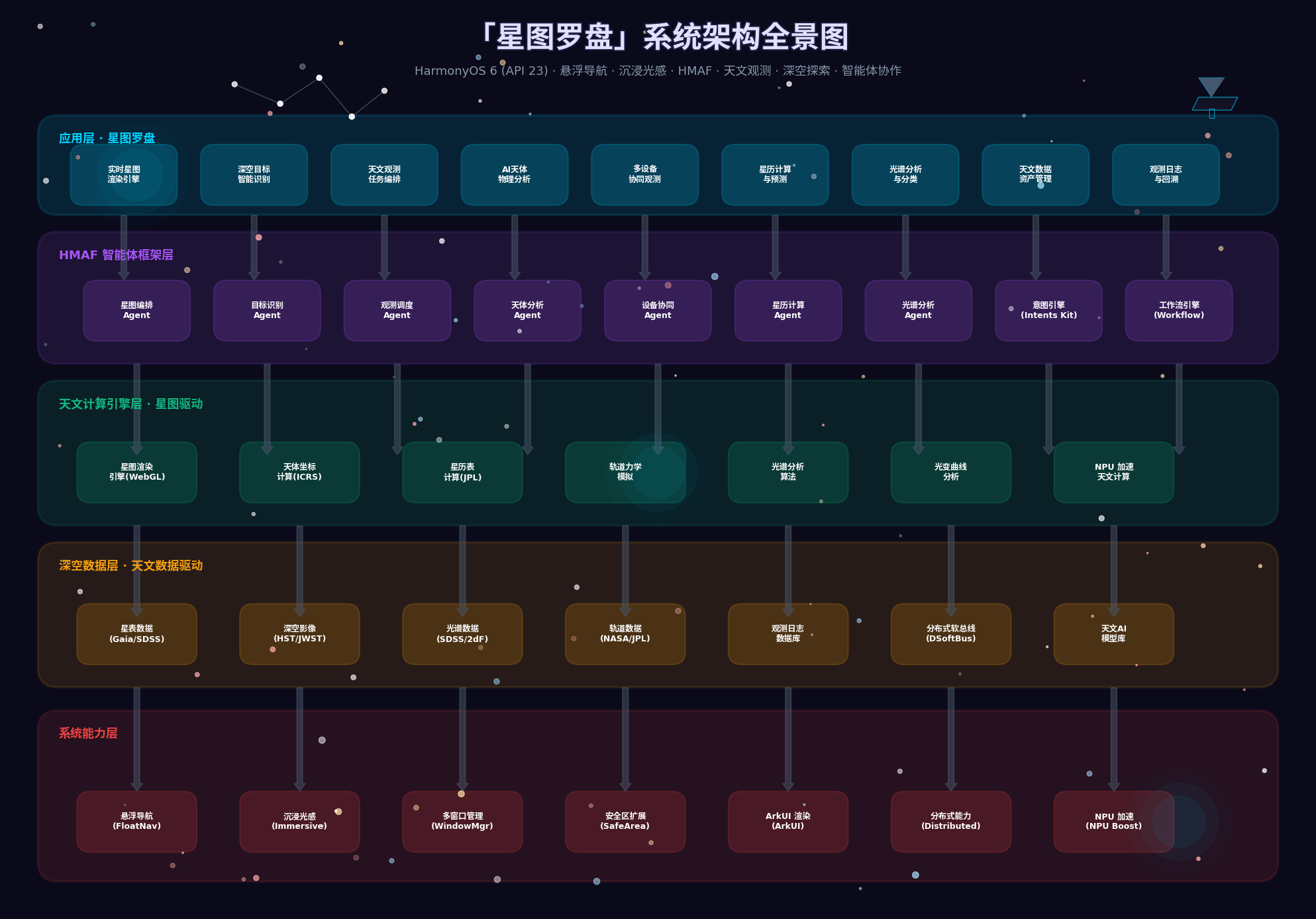
系统能力层:依托HarmonyOS 6的悬浮导航、沉浸光感、多窗口管理、安全区扩展、ArkUI渲染、分布式能力、NPU加速七大系统能力。
深空数据层:星表数据(Gaia/SDSS)、深空影像(HST/JWST)、光谱数据(SDSS/2dF)、轨道数据(NASA/JPL)、观测日志数据库、分布式软总线(DSoftBus)、天文AI模型库。
天文计算引擎层:星图渲染引擎(WebGL)、天体坐标计算(ICRS)、星历表计算(JPL)、轨道力学模拟、光谱分析算法、光变曲线分析、NPU加速天文计算。
HMAF框架层:9大天文Agent------星图编排Agent、目标识别Agent、观测调度Agent、天体分析Agent、设备协同Agent、星历计算Agent、光谱分析Agent、意图引擎(Intents Kit)、工作流引擎(Workflow)。
应用层:实时星图渲染引擎、深空目标智能识别、天文观测任务编排、AI天体物理分析、多设备协同观测、星历计算与预测、光谱分析与分类、天文数据资产管理、观测日志与回溯。
三、核心组件实战
3.1 天文数据模型(AstronomyDataModel.ets)
首先定义天文观测的核心数据模型,这是整个星图系统的数据基石:
typescript
// entry/src/main/ets/models/AstronomyDataModel.ets
// 天体类型枚举
export enum CelestialType {
STAR = 'star', // 恒星
GALAXY = 'galaxy', // 星系
NEBULA = 'nebula', // 星云
STAR_CLUSTER = 'star_cluster', // 星团
SUPERNOVA = 'supernova', // 超新星
PLANET = 'planet', // 行星
ASTEROID = 'asteroid', // 小行星
COMET = 'comet', // 彗星
PULSAR = 'pulsar', // 脉冲星
BLACK_HOLE = 'black_hole', // 黑洞
QUASAR = 'quasar', // 类星体
DWARF_PLANET = 'dwarf_planet' // 矮行星
}
// 光谱类型枚举
export enum SpectralType {
O = 'O', B = 'B', A = 'A', F = 'F',
G = 'G', K = 'K', M = 'M', L = 'L', T = 'T', Y = 'Y'
}
// 坐标系类型
export enum CoordinateSystem {
ICRS = 'icrs', // 国际天球参考系
J2000 = 'j2000', // J2000历元
GALACTIC = 'galactic', // 银道坐标系
HORIZONTAL = 'horizontal', // 水平坐标系(高度角/方位角)
ECLIPTIC = 'ecliptic' // 黄道坐标系
}
// 天体对象
export interface CelestialObject {
id: string;
name: string;
type: CelestialType;
coordinates: {
ra: number; // 赤经(度)
dec: number; // 赤纬(度)
distance?: number; // 距离(光年)
parallax?: number; // 视差(毫角秒)
properMotion?: { // 自行
ra: number; // 赤经自行(mas/yr)
dec: number; // 赤纬自行(mas/yr)
};
};
magnitude: { // 星等
apparent: number; // 视星等
absolute?: number; // 绝对星等
bolometric?: number; // 热星等
};
spectralType?: SpectralType; // 光谱类型
temperature?: number; // 表面温度(K)
radius?: number; // 半径(太阳半径)
mass?: number; // 质量(太阳质量)
luminosity?: number; // 光度(太阳光度)
metallicity?: number; // 金属丰度 [Fe/H]
age?: number; // 年龄(十亿年)
variability?: { // 光变特性
type: 'pulsating' | 'eclipsing' | 'eruptive' | 'rotating' | 'cataclysmic';
period?: number; // 周期(天)
amplitude?: number; // 振幅(星等)
};
discoveryInfo?: {
date: string;
discoverer: string;
method: string;
telescope: string;
};
catalogData?: {
hipparcos?: number; // Hipparcos编号
tycho?: string; // Tycho编号
gaia?: string; // Gaia DR3编号
sdss?: string; // SDSS编号
simbad?: string; // SIMBAD标识符
};
metadata: {
dataSource: string;
lastUpdated: number;
confidence: number;
tags: string[];
};
}
// 光谱数据
export interface SpectrumData {
objectId: string;
wavelength: number[]; // 波长(nm)
flux: number[]; // 流量(erg/s/cm²/Å)
fluxError?: number[]; // 流量误差
resolution: number; // 光谱分辨率 R = λ/Δλ
observationDate: string;
telescope: string;
instrument: string;
exposureTime: number; // 曝光时间(秒)
snr: number; // 信噪比
classification: {
spectralType: SpectralType;
confidence: number;
redshift?: number; // 红移
radialVelocity?: number; // 径向速度(km/s)
};
lines: SpectralLine[]; // 谱线识别
}
// 谱线
export interface SpectralLine {
wavelength: number; // 实验室波长(nm)
observedWavelength: number; // 观测波长(nm)
element: string; // 元素
ionization: number; // 电离态
equivalentWidth: number; // 等值宽度(Å)
lineStrength: number; // 线强
isEmission: boolean; // 是否为发射线
}
// 观测任务
export interface ObservationTask {
id: string;
name: string;
target: CelestialObject;
schedule: {
startTime: number; // 开始时间(Unix时间戳)
endTime: number; // 结束时间
priority: number; // 优先级 1-10
minAltitude: number; // 最小高度角(度)
maxMoonPhase?: number; // 最大月相(0-1)
weatherConstraint?: string; // 天气约束
};
instrument: {
telescope: string;
camera: string;
filter: string; // 滤镜
exposureTime: number; // 单帧曝光(秒)
numExposures: number; // 帧数
binning: number; // 像素合并
gain: number; // 增益
};
status: 'pending' | 'scheduled' | 'in_progress' | 'completed' | 'failed';
progress: {
currentExposure: number;
totalExposures: number;
currentFrame: string; // 当前帧数据路径
quality: number; // 图像质量评分
};
results: {
images: string[]; // 图像路径
spectra?: string[]; // 光谱路径
photometry?: PhotometryData[];
astrometry?: AstrometryData;
};
}
// 测光数据
export interface PhotometryData {
filter: string;
magnitude: number;
error: number;
exposureTime: number;
observationDate: number;
airmass: number; // 大气质量
}
// 天体测量数据
export interface AstrometryData {
ra: number;
dec: number;
raError: number;
decError: number;
epoch: number;
referenceFrame: string;
}
// 星历表数据
export interface EphemerisData {
objectId: string;
epoch: number; // 历元(J2000儒略日)
coordinates: {
ra: number;
dec: number;
distance: number; // 距离(AU)
radialVelocity: number; // 径向速度(km/s)
};
orbitalElements?: {
semiMajorAxis: number; // 半长轴(AU)
eccentricity: number; // 离心率
inclination: number; // 轨道倾角(度)
longitudeOfAscendingNode: number; // 升交点经度(度)
argumentOfPeriapsis: number; // 近心点幅角(度)
meanAnomaly: number; // 平近点角(度)
period: number; // 轨道周期(天)
epoch: number; // 历元
};
perturbations: {
jupiter?: number; // 木星摄动
saturn?: number; // 土星摄动
other?: number; // 其他摄动
};
}
// 观测日志
export interface ObservationLog {
id: string;
taskId: string;
timestamp: number;
observer: string;
location: {
latitude: number;
longitude: number;
altitude: number;
timezone: string;
};
weather: {
temperature: number; // 温度(°C)
humidity: number; // 湿度(%)
windSpeed: number; // 风速(m/s)
seeing: number; // 视宁度(角秒)
transparency: number; // 大气透明度(0-1)
cloudCover: number; // 云量(0-1)
};
equipment: {
telescope: string;
mount: string;
camera: string;
filters: string[];
guideScope?: string;
};
notes: string;
images: string[];
dataQuality: number; // 数据质量评分(0-100)
}3.2 实时星图渲染引擎(StarMapRenderer.ets)
基于WebGL与NPU加速,构建十亿恒星实时渲染引擎:
typescript
// entry/src/main/ets/engine/StarMapRenderer.ets
import { graphics } from '@kit.GraphicsKit';
import { npu } from '@kit.NPUKit';
export class StarMapRenderer {
private static instance: StarMapRenderer;
private renderer: graphics.Renderer | null = null;
private npuContext: npu.NPUContext | null = null;
private starBuffer: graphics.Buffer | null = null;
private shaderProgram: graphics.ShaderProgram | null = null;
private textureAtlas: graphics.Texture | null = null;
// 渲染配置
private config = {
maxStars: 10000000, // 最大渲染恒星数
fov: 60, // 视场角(度)
nearPlane: 0.1,
farPlane: 1000000,
starSize: 2.0, // 恒星基础大小
starBrightness: 1.0, // 亮度系数
milkyWayEnabled: true, // 是否渲染银河
constellationLines: true, // 是否显示星座连线
gridEnabled: true, // 是否显示坐标网格
atmosphereEnabled: true, // 是否渲染大气散射
bloomEnabled: true, // 是否启用泛光
dynamicRange: 1000 // 动态范围(HDR)
};
// 当前视图参数
private viewState = {
centerRa: 0, // 中心赤经(度)
centerDec: 0, // 中心赤纬(度)
zoom: 1, // 缩放级别
rotation: 0, // 旋转角度(度)
epoch: 2451545.0, // J2000历元
projection: 'mercator' as 'mercator' | 'mollweide' | 'orthographic' | 'stereographic'
};
private constructor() {}
static async getInstance(): Promise<StarMapRenderer> {
if (!StarMapRenderer.instance) {
StarMapRenderer.instance = new StarMapRenderer();
await StarMapRenderer.instance.initialize();
}
return StarMapRenderer.instance;
}
private async initialize(): Promise<void> {
// 初始化Vulkan渲染器
this.renderer = await graphics.createRenderer({
backend: 'vulkan',
enableRayTracing: false, // 星图不需要光追
enableHDR: true,
targetFrameRate: 60
});
// 初始化NPU用于星表查询加速
this.npuContext = await npu.createNPUContext({
deviceType: npu.DeviceType.NPU,
priority: npu.Priority.NORMAL,
memoryLimit: 2 * 1024 * 1024 * 1024 // 2GB
});
// 加载星表数据到GPU缓冲区
await this.loadStarData();
// 创建恒星纹理图集
await this.createStarTextureAtlas();
// 创建着色器程序
await this.createShaderProgram();
console.log('StarMapRenderer initialized');
}
// 加载星表数据
private async loadStarData(): Promise<void> {
// 从Gaia DR3加载恒星数据
// 实际实现需从本地数据库或远程API加载
const starData = await this.fetchGaiaData();
// 创建GPU缓冲区
const bufferSize = starData.length * 16; // 每颗恒星16字节(位置4 + 亮度4 + 颜色4 + 大小4)
this.starBuffer = await this.renderer?.createBuffer({
size: bufferSize,
usage: graphics.BufferUsage.VERTEX,
memory: graphics.MemoryUsage.GPU_ONLY
});
// 上传数据到GPU
await this.starBuffer?.upload(starData);
}
private async fetchGaiaData(): Promise<ArrayBuffer> {
// 从Gaia DR3数据库获取恒星数据
// 简化实现:返回模拟数据
const numStars = Math.min(this.config.maxStars, 1000000);
const buffer = new ArrayBuffer(numStars * 16);
const view = new Float32Array(buffer);
for (let i = 0; i < numStars; i++) {
const offset = i * 4;
// 位置(归一化球坐标)
view[offset] = Math.random() * 2 - 1; // x
view[offset + 1] = Math.random() * 2 - 1; // y
view[offset + 2] = Math.random() * 2 - 1; // z
view[offset + 3] = Math.random() * 10; // 亮度(星等)
}
return buffer;
}
// 创建恒星纹理图集
private async createStarTextureAtlas(): Promise<void> {
// 创建不同星等的恒星纹理
const atlasSize = 512;
const canvas = new OffscreenCanvas(atlasSize, atlasSize);
const ctx = canvas.getContext('2d')!;
// 绘制不同大小的恒星光斑
const sizes = [1, 2, 4, 8, 16];
for (let i = 0; i < sizes.length; i++) {
const size = sizes[i];
const x = (i % 4) * 128 + 64;
const y = Math.floor(i / 4) * 128 + 64;
// 绘制高斯光斑
const gradient = ctx.createRadialGradient(x, y, 0, x, y, size * 4);
gradient.addColorStop(0, 'rgba(255, 255, 255, 1)');
gradient.addColorStop(0.1, 'rgba(255, 255, 255, 0.8)');
gradient.addColorStop(0.3, 'rgba(255, 255, 200, 0.4)');
gradient.addColorStop(1, 'rgba(255, 255, 255, 0)');
ctx.fillStyle = gradient;
ctx.fillRect(x - size * 4, y - size * 4, size * 8, size * 8);
}
// 创建纹理
this.textureAtlas = await this.renderer?.createTexture({
width: atlasSize,
height: atlasSize,
format: graphics.TextureFormat.RGBA8_UNORM,
usage: graphics.TextureUsage.SAMPLED
});
await this.textureAtlas?.upload(canvas);
}
// 创建着色器程序
private async createShaderProgram(): Promise<void> {
const vertexShader = `
#version 450
layout(location = 0) in vec3 position;
layout(location = 1) in float brightness;
layout(location = 2) in vec3 color;
layout(location = 3) in float size;
layout(set = 0, binding = 0) uniform ViewUniforms {
mat4 viewMatrix;
mat4 projectionMatrix;
vec3 cameraPosition;
float zoom;
};
layout(location = 0) out vec3 vColor;
layout(location = 1) out float vBrightness;
layout(location = 2) out float vSize;
void main() {
vec4 worldPos = vec4(position, 1.0);
vec4 viewPos = viewMatrix * worldPos;
vec4 clipPos = projectionMatrix * viewPos;
gl_Position = clipPos;
gl_PointSize = size * zoom * (1000.0 / -viewPos.z);
vColor = color;
vBrightness = brightness;
vSize = size;
}
`;
const fragmentShader = `
#version 450
layout(location = 0) in vec3 vColor;
layout(location = 1) in float vBrightness;
layout(location = 2) in float vSize;
layout(set = 1, binding = 0) uniform sampler2D starTexture;
layout(location = 0) out vec4 fragColor;
void main() {
vec2 texCoord = gl_PointCoord;
vec4 texColor = texture(starTexture, texCoord);
// HDR色调映射
float luminance = vBrightness * texColor.a;
vec3 hdrColor = vColor * luminance;
// ACES色调映射
vec3 mapped = hdrColor / (hdrColor + vec3(1.0));
mapped = pow(mapped, vec3(1.0 / 2.2)); // Gamma校正
fragColor = vec4(mapped, texColor.a);
}
`;
this.shaderProgram = await this.renderer?.createShaderProgram({
vertexShader,
fragmentShader,
vertexLayout: [
{ location: 0, format: graphics.VertexFormat.FLOAT32x3, offset: 0 }, // position
{ location: 1, format: graphics.VertexFormat.FLOAT32, offset: 12 }, // brightness
{ location: 2, format: graphics.VertexFormat.FLOAT32x3, offset: 16 }, // color
{ location: 3, format: graphics.VertexFormat.FLOAT32, offset: 28 } // size
]
});
}
// 渲染星图
async render(): Promise<void> {
if (!this.renderer || !this.starBuffer || !this.shaderProgram) return;
// 更新视图矩阵
const viewMatrix = this.calculateViewMatrix();
const projectionMatrix = this.calculateProjectionMatrix();
// 绑定 uniform
await this.shaderProgram.setUniforms({
viewMatrix,
projectionMatrix,
cameraPosition: [0, 0, 0],
zoom: this.viewState.zoom
});
// 绑定纹理
await this.shaderProgram.setTexture(1, 0, this.textureAtlas!);
// 绘制恒星
await this.renderer.draw({
pipeline: this.shaderProgram,
vertexBuffer: this.starBuffer,
vertexCount: this.config.maxStars,
primitiveType: graphics.PrimitiveType.POINTS
});
// 绘制星座连线
if (this.config.constellationLines) {
await this.drawConstellationLines();
}
// 绘制坐标网格
if (this.config.gridEnabled) {
await this.drawCoordinateGrid();
}
// 绘制银河
if (this.config.milkyWayEnabled) {
await this.drawMilkyWay();
}
// 后处理(泛光)
if (this.config.bloomEnabled) {
await this.applyBloom();
}
// 提交帧
await this.renderer.present();
}
// 计算视图矩阵
private calculateViewMatrix(): number[] {
const ra = this.viewState.centerRa * Math.PI / 180;
const dec = this.viewState.centerDec * Math.PI / 180;
// 构建旋转矩阵(从ICRS到视图坐标)
const cosRa = Math.cos(ra);
const sinRa = Math.sin(ra);
const cosDec = Math.cos(dec);
const sinDec = Math.sin(dec);
return [
-sinRa, cosRa, 0, 0,
-sinDec * cosRa, -sinDec * sinRa, cosDec, 0,
cosDec * cosRa, cosDec * sinRa, sinDec, 0,
0, 0, 0, 1
];
}
// 计算投影矩阵
private calculateProjectionMatrix(): number[] {
const fov = this.config.fov * Math.PI / 180;
const aspect = 16 / 9; // 假设16:9
const near = this.config.nearPlane;
const far = this.config.farPlane;
const f = 1.0 / Math.tan(fov / 2);
const nf = 1.0 / (near - far);
return [
f / aspect, 0, 0, 0,
0, f, 0, 0,
0, 0, (far + near) * nf, -1,
0, 0, 2 * far * near * nf, 0
];
}
// 绘制星座连线
private async drawConstellationLines(): Promise<void> {
// 从星座数据库加载连线数据
const lines = await this.fetchConstellationLines();
// 创建线缓冲区
const lineBuffer = await this.renderer?.createBuffer({
size: lines.length * 24, // 每条线2个点,每点12字节
usage: graphics.BufferUsage.VERTEX,
memory: graphics.MemoryUsage.GPU_ONLY
});
await lineBuffer?.upload(lines);
// 绘制
await this.renderer?.draw({
pipeline: this.shaderProgram,
vertexBuffer: lineBuffer!,
vertexCount: lines.length / 12,
primitiveType: graphics.PrimitiveType.LINES
});
}
private async fetchConstellationLines(): Promise<ArrayBuffer> {
// 从星座数据库获取连线数据
return new ArrayBuffer(0);
}
// 绘制坐标网格
private async drawCoordinateGrid(): Promise<void> {
// 绘制RA/DEC网格线
const gridLines = this.generateGridLines();
// 绘制实现...
}
private generateGridLines(): ArrayBuffer {
// 生成网格线数据
return new ArrayBuffer(0);
}
// 绘制银河
private async drawMilkyWay(): Promise<void> {
// 加载银河纹理
const milkyWayTexture = await this.loadMilkyWayTexture();
// 绘制银河背景
// 实现...
}
private async loadMilkyWayTexture(): Promise<graphics.Texture> {
// 加载银河全景图
return this.renderer!.createTexture({
width: 4096,
height: 2048,
format: graphics.TextureFormat.RGBA8_UNORM,
usage: graphics.TextureUsage.SAMPLED
});
}
// 应用泛光效果
private async applyBloom(): Promise<void> {
// 提取高亮区域
// 模糊处理
// 混合
}
// 设置视图中心
setCenter(ra: number, dec: number): void {
this.viewState.centerRa = ra;
this.viewState.centerDec = dec;
}
// 设置缩放
setZoom(zoom: number): void {
this.viewState.zoom = Math.max(0.1, Math.min(1000, zoom));
}
// 设置投影方式
setProjection(projection: 'mercator' | 'mollweide' | 'orthographic' | 'stereographic'): void {
this.viewState.projection = projection;
}
// 获取当前视图参数
getViewState() {
return { ...this.viewState };
}
}3.3 深空目标智能识别(DeepSpaceRecognizer.ets)
基于端侧大模型与NPU加速,实现天体智能识别与分类:
typescript
// entry/src/main/ets/engine/DeepSpaceRecognizer.ets
import { mindSporeLite } from '@kit.MindSporeLiteKit';
import { npu } from '@kit.NPUKit';
import { CelestialObject, CelestialType, SpectralType } from '../models/AstronomyDataModel';
export class DeepSpaceRecognizer {
private static instance: DeepSpaceRecognizer;
private modelSession: mindSporeLite.ModelSession | null = null;
private npuContext: npu.NPUContext | null = null;
private classificationThreshold: number = 0.85;
private constructor() {}
static async getInstance(): Promise<DeepSpaceRecognizer> {
if (!DeepSpaceRecognizer.instance) {
DeepSpaceRecognizer.instance = new DeepSpaceRecognizer();
await DeepSpaceRecognizer.instance.initialize();
}
return DeepSpaceRecognizer.instance;
}
private async initialize(): Promise<void> {
// 初始化NPU上下文
this.npuContext = await npu.createNPUContext({
deviceType: npu.DeviceType.NPU,
priority: npu.Priority.HIGH,
memoryLimit: 4 * 1024 * 1024 * 1024 // 4GB
});
// 加载天体分类模型
const modelBuffer = await this.loadModel('astronomy_classifier_v3.mslite');
this.modelSession = await mindSporeLite.createModelSession(modelBuffer, {
target: 'npu',
precisionMode: 'fp16',
threadNum: 4,
npuContext: this.npuContext
});
console.log('DeepSpaceRecognizer initialized');
}
private async loadModel(path: string): Promise<ArrayBuffer> {
const file = await fileIo.open(path, fileIo.OpenMode.READ_ONLY);
const stat = await fileIo.stat(file.fd);
const buffer = new ArrayBuffer(stat.size);
await fileIo.read(file.fd, buffer, { offset: 0, length: stat.size });
await fileIo.close(file);
return buffer;
}
// 识别天体图像
async recognizeImage(imageData: ArrayBuffer): Promise<{
type: CelestialType;
confidence: number;
features: string[];
similarObjects: CelestialObject[];
}> {
// 预处理图像
const preprocessed = await this.preprocessImage(imageData);
// 运行推理
const output = await this.modelSession?.run({
input: preprocessed
});
// 解析结果
const predictions = this.parsePredictions(output!);
// 获取最可能的类型
const maxPrediction = predictions.reduce((max, p) => p.confidence > max.confidence ? p : max);
if (maxPrediction.confidence < this.classificationThreshold) {
return {
type: CelestialType.STAR, // 默认类型
confidence: maxPrediction.confidence,
features: ['unknown'],
similarObjects: []
};
}
// 查找相似天体
const similarObjects = await this.findSimilarObjects(maxPrediction.type, predictions);
return {
type: maxPrediction.type,
confidence: maxPrediction.confidence,
features: maxPrediction.features,
similarObjects
};
}
// 识别光谱
async recognizeSpectrum(wavelength: number[], flux: number[]): Promise<{
spectralType: SpectralType;
confidence: number;
redshift?: number;
radialVelocity?: number;
lines: { element: string; wavelength: number; strength: number }[];
}> {
// 将光谱数据转换为模型输入
const spectrumInput = this.normalizeSpectrum(wavelength, flux);
// 运行光谱分类模型
const output = await this.modelSession?.run({
input: spectrumInput
});
// 解析光谱分类结果
const classification = this.parseSpectrumClassification(output!);
// 识别谱线
const lines = await this.identifySpectralLines(wavelength, flux);
return {
spectralType: classification.spectralType,
confidence: classification.confidence,
redshift: classification.redshift,
radialVelocity: classification.radialVelocity,
lines
};
}
// 识别光变曲线
async recognizeLightCurve(times: number[], magnitudes: number[]): Promise<{
variabilityType: string;
period?: number;
amplitude: number;
confidence: number;
classification: string;
}> {
// 预处理光变曲线
const lcInput = this.preprocessLightCurve(times, magnitudes);
// 运行光变曲线分类模型
const output = await this.modelSession?.run({
input: lcInput
});
// 解析结果
return this.parseLightCurveClassification(output!);
}
// 预处理图像
private async preprocessImage(imageData: ArrayBuffer): Promise<ArrayBuffer> {
// 调整大小、归一化、格式转换
// 简化为224x224 RGB
const targetSize = 224 * 224 * 3;
const buffer = new ArrayBuffer(targetSize * 4); // float32
const view = new Float32Array(buffer);
// 实际实现需使用图像处理库
for (let i = 0; i < view.length; i++) {
view[i] = Math.random(); // 模拟数据
}
return buffer;
}
// 解析预测结果
private parsePredictions(output: mindSporeLite.ModelOutput): Array<{
type: CelestialType;
confidence: number;
features: string[];
}> {
const types = Object.values(CelestialType);
const predictions: Array<{ type: CelestialType; confidence: number; features: string[] }> = [];
// 假设输出是每种类型的概率
const probabilities = new Float32Array(output.buffer);
for (let i = 0; i < types.length && i < probabilities.length; i++) {
predictions.push({
type: types[i],
confidence: probabilities[i],
features: [] // 实际需从模型输出提取
});
}
return predictions.sort((a, b) => b.confidence - a.confidence);
}
// 查找相似天体
private async findSimilarObjects(
type: CelestialType,
predictions: Array<{ type: CelestialType; confidence: number; features: string[] }>
): Promise<CelestialObject[]> {
// 从数据库查询相似天体
// 实际实现需查询本地或远程数据库
return [];
}
// 归一化光谱
private normalizeSpectrum(wavelength: number[], flux: number[]): ArrayBuffer {
// 插值到固定波长网格
const gridSize = 1000;
const buffer = new ArrayBuffer(gridSize * 4);
const view = new Float32Array(buffer);
// 实际实现需使用光谱处理库
for (let i = 0; i < gridSize; i++) {
view[i] = flux[Math.floor(i * flux.length / gridSize)] || 0;
}
return buffer;
}
// 解析光谱分类
private parseSpectrumClassification(output: mindSporeLite.ModelOutput): {
spectralType: SpectralType;
confidence: number;
redshift?: number;
radialVelocity?: number;
} {
const types = Object.values(SpectralType);
const probabilities = new Float32Array(output.buffer);
const maxIndex = probabilities.indexOf(Math.max(...Array.from(probabilities)));
return {
spectralType: types[maxIndex] || SpectralType.G,
confidence: probabilities[maxIndex],
redshift: probabilities[types.length] || 0,
radialVelocity: probabilities[types.length + 1] || 0
};
}
// 识别谱线
private async identifySpectralLines(wavelength: number[], flux: number[]): Promise<
Array<{ element: string; wavelength: number; strength: number }>
> {
const lines: Array<{ element: string; wavelength: number; strength: number }> = [];
// 常见谱线数据库
const knownLines = [
{ element: 'H', ionization: 1, wavelength: 656.28 }, // Hα
{ element: 'H', ionization: 1, wavelength: 486.13 }, // Hβ
{ element: 'H', ionization: 1, wavelength: 434.05 }, // Hγ
{ element: 'Ca', ionization: 2, wavelength: 393.37 }, // Ca II K
{ element: 'Ca', ionization: 2, wavelength: 396.85 }, // Ca II H
{ element: 'Na', ionization: 1, wavelength: 589.00 }, // Na I D
{ element: 'O', ionization: 3, wavelength: 500.68 }, // O III
{ element: 'Mg', ionization: 2, wavelength: 517.27 }, // Mg I b
];
// 检测谱线
for (const line of knownLines) {
// 在波长附近查找极值
const index = this.findNearestWavelength(wavelength, line.wavelength);
if (index >= 0 && index < flux.length) {
const strength = flux[index];
if (strength > 0.1) { // 阈值
lines.push({
element: line.element,
wavelength: wavelength[index],
strength
});
}
}
}
return lines;
}
private findNearestWavelength(wavelengths: number[], target: number): number {
let minDiff = Infinity;
let index = -1;
for (let i = 0; i < wavelengths.length; i++) {
const diff = Math.abs(wavelengths[i] - target);
if (diff < minDiff) {
minDiff = diff;
index = i;
}
}
return index;
}
// 预处理光变曲线
private preprocessLightCurve(times: number[], magnitudes: number[]): ArrayBuffer {
// 归一化、插值、特征提取
const buffer = new ArrayBuffer(1000 * 4);
const view = new Float32Array(buffer);
for (let i = 0; i < 1000; i++) {
view[i] = magnitudes[Math.floor(i * magnitudes.length / 1000)] || 0;
}
return buffer;
}
// 解析光变曲线分类
private parseLightCurveClassification(output: mindSporeLite.ModelOutput): {
variabilityType: string;
period?: number;
amplitude: number;
confidence: number;
classification: string;
} {
const result = new Float32Array(output.buffer);
return {
variabilityType: result[0] > 0.5 ? 'pulsating' : 'eclipsing',
period: result[1] > 0 ? result[1] : undefined,
amplitude: result[2],
confidence: result[3],
classification: 'variable_star'
};
}
// 批量识别
async batchRecognize(images: ArrayBuffer[]): Promise<Array<{
image: ArrayBuffer;
result: Awaited<ReturnType<DeepSpaceRecognizer['recognizeImage']>>;
}>> {
const results = [];
for (const image of images) {
const result = await this.recognizeImage(image);
results.push({ image, result });
}
return results;
}
}3.4 多设备协同观测(MultiDeviceObservation.ets)
基于分布式软总线实现望远镜阵列协同观测:
typescript
// entry/src/main/ets/engine/MultiDeviceObservation.ets
import { distributedDeviceManager } from '@kit.DistributedServiceKit';
import { distributedKVStore } from '@kit.ArkData';
export interface TelescopeDevice {
deviceId: string;
deviceName: string;
deviceType: 'telescope' | 'camera' | 'guide_scope' | 'spectrograph';
capabilities: {
aperture: number; // 口径(mm)
focalLength: number; // 焦距(mm)
fov: { width: number; height: number }; // 视场角(度)
resolution: number; // 分辨率(角秒/像素)
filters: string[]; // 可用滤镜
minExposure: number; // 最小曝光(秒)
maxExposure: number; // 最大曝光(秒)
hasGuiding: boolean; // 是否支持导星
hasSpectrograph: boolean; // 是否支持光谱仪
};
status: 'idle' | 'observing' | 'calibrating' | 'error';
location: {
latitude: number;
longitude: number;
altitude: number;
};
currentObservation?: string; // 当前观测任务ID
}
export interface ObservationPlan {
id: string;
target: string; // 目标天体ID
strategy: 'single' | 'mosaic' | 'stereo' | 'spectroscopy' | 'photometry';
devices: string[]; // 参与设备ID列表
schedule: {
startTime: number;
endTime: number;
priority: number;
};
coordination: {
syncMode: 'leader_follower' | 'peer_to_peer' | 'broadcast';
leaderDevice?: string; // 主设备
syncInterval: number; // 同步间隔(ms)
tolerance: number; // 同步容差(角秒)
};
dataFusion: {
mode: 'stacking' | 'mosaicking' | 'stereoscopic' | 'spectral_composite';
alignmentMethod: 'stars' | 'features' | 'manual';
rejectionAlgorithm: 'sigma_clip' | 'min_max' | 'none';
};
}
export class MultiDeviceObservation {
private static instance: MultiDeviceObservation;
private deviceManager: distributedDeviceManager.DeviceManager | null = null;
private kvStore: distributedKVStore.SingleKVStore | null = null;
private devices: Map<string, TelescopeDevice> = new Map();
private activePlans: Map<string, ObservationPlan> = new Map();
private syncInterval: number = 1000; // 1秒同步间隔
private constructor() {}
static async getInstance(): Promise<MultiDeviceObservation> {
if (!MultiDeviceObservation.instance) {
MultiDeviceObservation.instance = new MultiDeviceObservation();
await MultiDeviceObservation.instance.initialize();
}
return MultiDeviceObservation.instance;
}
private async initialize(): Promise<void> {
// 初始化分布式设备管理
this.deviceManager = distributedDeviceManager.createDeviceManager({
bundleName: getContext().applicationInfo.name
});
// 初始化分布式KV存储
this.kvStore = await distributedKVStore.createKVManager({
bundleName: getContext().applicationInfo.name
}).getKVStore({
storeId: 'observation_sync',
securityLevel: distributedKVStore.SecurityLevel.S2,
type: distributedKVStore.KVStoreType.DEVICE_COLLABORATION
});
// 监听设备上下线
this.deviceManager.on('deviceStateChange', (data) => {
if (data.action === 'online') {
this.addDevice(data.device);
} else if (data.action === 'offline') {
this.removeDevice(data.device.deviceId);
}
});
// 启动同步循环
this.startSyncLoop();
}
// 发现设备
async discoverDevices(): Promise<TelescopeDevice[]> {
const deviceList = await this.deviceManager?.getAvailableDeviceList();
const devices: TelescopeDevice[] = [];
for (const deviceInfo of deviceList || []) {
const device = await this.queryDeviceCapabilities(deviceInfo.deviceId);
if (device) {
devices.push(device);
this.devices.set(device.deviceId, device);
}
}
return devices;
}
private async queryDeviceCapabilities(deviceId: string): Promise<TelescopeDevice | null> {
try {
// 通过分布式软总线查询设备能力
const response = await this.deviceManager?.sendMessage(deviceId, {
type: 'capability_query',
timestamp: Date.now()
});
if (response && response.capabilities) {
return {
deviceId,
deviceName: response.deviceName || `Telescope-${deviceId.slice(-4)}`,
deviceType: response.deviceType || 'telescope',
capabilities: response.capabilities,
status: 'idle',
location: response.location || { latitude: 0, longitude: 0, altitude: 0 }
};
}
} catch (error) {
console.error(`Failed to query device ${deviceId}:`, error);
}
return null;
}
// 创建协同观测计划
async createObservationPlan(config: {
target: string;
strategy: ObservationPlan['strategy'];
deviceIds: string[];
schedule: ObservationPlan['schedule'];
dataFusion: ObservationPlan['dataFusion'];
}): Promise<string> {
const planId = `plan_${Date.now()}`;
// 验证设备可用性
const availableDevices = config.deviceIds.filter(id => {
const device = this.devices.get(id);
return device && device.status === 'idle';
});
if (availableDevices.length === 0) {
throw new Error('No available devices for observation');
}
// 选择主设备(最大口径)
const leaderDevice = availableDevices.reduce((leader, id) => {
const leaderDev = this.devices.get(leader)!;
const currentDev = this.devices.get(id)!;
return currentDev.capabilities.aperture > leaderDev.capabilities.aperture ? id : leader;
});
const plan: ObservationPlan = {
id: planId,
target: config.target,
strategy: config.strategy,
devices: availableDevices,
schedule: config.schedule,
coordination: {
syncMode: availableDevices.length > 2 ? 'leader_follower' : 'peer_to_peer',
leaderDevice,
syncInterval: this.syncInterval,
tolerance: 1.0 // 1角秒容差
},
dataFusion: config.dataFusion
};
this.activePlans.set(planId, plan);
// 广播计划到所有参与设备
await this.broadcastPlan(plan);
return planId;
}
// 启动协同观测
async startObservation(planId: string): Promise<void> {
const plan = this.activePlans.get(planId);
if (!plan) throw new Error(`Plan ${planId} not found`);
// 同步开始时间
const startTime = Date.now() + 5000; // 5秒后统一开始
// 向所有设备发送开始指令
const startPromises = plan.devices.map(async (deviceId) => {
await this.deviceManager?.sendMessage(deviceId, {
type: 'observation_start',
planId,
startTime,
target: plan.target,
exposure: this.calculateExposure(plan, deviceId),
filter: this.selectFilter(plan, deviceId)
});
// 更新设备状态
const device = this.devices.get(deviceId);
if (device) {
device.status = 'observing';
device.currentObservation = planId;
}
});
await Promise.all(startPromises);
// 启动同步监控
this.startSyncMonitoring(planId);
}
// 同步监控
private startSyncMonitoring(planId: string): void {
const plan = this.activePlans.get(planId);
if (!plan) return;
const monitorInterval = setInterval(async () => {
const syncStatus = await this.checkSynchronization(planId);
if (!syncStatus.isSynchronized) {
// 发送同步校正指令
await this.sendSyncCorrection(planId, syncStatus.corrections);
}
// 检查观测完成
const isComplete = await this.checkObservationComplete(planId);
if (isComplete) {
clearInterval(monitorInterval);
await this.finalizeObservation(planId);
}
}, plan.coordination.syncInterval);
}
// 检查同步状态
private async checkSynchronization(planId: string): Promise<{
isSynchronized: boolean;
corrections: Map<string, { ra: number; dec: number }>;
}> {
const plan = this.activePlans.get(planId);
if (!plan) return { isSynchronized: true, corrections: new Map() };
const corrections = new Map<string, { ra: number; dec: number }>();
let isSynchronized = true;
for (const deviceId of plan.devices) {
// 查询设备当前指向
const status = await this.deviceManager?.sendMessage(deviceId, {
type: 'status_query',
planId
});
if (status && plan.coordination.leaderDevice) {
const leaderStatus = await this.deviceManager?.sendMessage(
plan.coordination.leaderDevice,
{ type: 'status_query', planId }
);
if (leaderStatus && status) {
const raDiff = Math.abs(status.ra - leaderStatus.ra);
const decDiff = Math.abs(status.dec - leaderStatus.dec);
if (raDiff > plan.coordination.tolerance || decDiff > plan.coordination.tolerance) {
isSynchronized = false;
corrections.set(deviceId, {
ra: leaderStatus.ra - status.ra,
dec: leaderStatus.dec - status.dec
});
}
}
}
}
return { isSynchronized, corrections };
}
// 发送同步校正
private async sendSyncCorrection(
planId: string,
corrections: Map<string, { ra: number; dec: number }>
): Promise<void> {
for (const [deviceId, correction] of corrections) {
await this.deviceManager?.sendMessage(deviceId, {
type: 'sync_correction',
planId,
correction
});
}
}
// 检查观测完成
private async checkObservationComplete(planId: string): Promise<boolean> {
const plan = this.activePlans.get(planId);
if (!plan) return true;
for (const deviceId of plan.devices) {
const device = this.devices.get(deviceId);
if (device && device.status === 'observing') {
return false;
}
}
return true;
}
// 完成观测
private async finalizeObservation(planId: string): Promise<void> {
const plan = this.activePlans.get(planId);
if (!plan) return;
// 收集所有设备数据
const dataCollection = await this.collectObservationData(planId);
// 数据融合处理
const fusedData = await this.fuseData(plan, dataCollection);
// 保存结果
await this.saveObservationResult(planId, fusedData);
// 释放设备
for (const deviceId of plan.devices) {
const device = this.devices.get(deviceId);
if (device) {
device.status = 'idle';
device.currentObservation = undefined;
}
}
// 通知完成
AppStorage.setOrCreate('observation_complete', {
planId,
result: fusedData
});
}
// 收集观测数据
private async collectObservationData(planId: string): Promise<Map<string, ArrayBuffer>> {
const plan = this.activePlans.get(planId);
if (!plan) return new Map();
const dataCollection = new Map<string, ArrayBuffer>();
for (const deviceId of plan.devices) {
const response = await this.deviceManager?.sendMessage(deviceId, {
type: 'data_request',
planId
});
if (response && response.data) {
dataCollection.set(deviceId, response.data);
}
}
return dataCollection;
}
// 数据融合
private async fuseData(
plan: ObservationPlan,
dataCollection: Map<string, ArrayBuffer>
): Promise<ArrayBuffer> {
switch (plan.dataFusion.mode) {
case 'stacking':
return await this.stackImages(dataCollection);
case 'mosaicking':
return await this.createMosaic(dataCollection);
case 'stereoscopic':
return await this.createStereoImage(dataCollection);
case 'spectral_composite':
return await this.createSpectralComposite(dataCollection);
default:
return dataCollection.values().next().value || new ArrayBuffer(0);
}
}
// 图像叠加
private async stackImages(dataCollection: Map<string, ArrayBuffer>): Promise<ArrayBuffer> {
// 使用NPU加速图像叠加
// 实际实现需使用图像处理库
return new ArrayBuffer(0);
}
// 创建马赛克图
private async createMosaic(dataCollection: Map<string, ArrayBuffer>): Promise<ArrayBuffer> {
// 拼接多张图像
return new ArrayBuffer(0);
}
// 创建立体图像
private async createStereoImage(dataCollection: Map<string, ArrayBuffer>): Promise<ArrayBuffer> {
// 生成立体视觉图像
return new ArrayBuffer(0);
}
// 创建光谱合成图
private async createSpectralComposite(dataCollection: Map<string, ArrayBuffer>): Promise<ArrayBuffer> {
// 合成多波段光谱数据
return new ArrayBuffer(0);
}
// 计算曝光时间
private calculateExposure(plan: ObservationPlan, deviceId: string): number {
const device = this.devices.get(deviceId);
if (!device) return 30;
// 根据设备能力和目标亮度计算
const baseExposure = 30;
const apertureFactor = (device.capabilities.aperture / 200) ** 2;
return Math.min(
baseExposure / apertureFactor,
device.capabilities.maxExposure
);
}
// 选择滤镜
private selectFilter(plan: ObservationPlan, deviceId: string): string {
const device = this.devices.get(deviceId);
if (!device || device.capabilities.filters.length === 0) return 'clear';
// 根据观测策略选择
switch (plan.strategy) {
case 'photometry':
return 'V'; // 可见光
case 'spectroscopy':
return 'clear'; // 无滤镜
case 'mosaic':
return 'L'; // 亮度
default:
return device.capabilities.filters[0];
}
}
// 保存观测结果
private async saveObservationResult(planId: string, data: ArrayBuffer): Promise<void> {
await this.kvStore?.put(`result_${planId}`, data);
}
// 广播计划
private async broadcastPlan(plan: ObservationPlan): Promise<void> {
for (const deviceId of plan.devices) {
await this.deviceManager?.sendMessage(deviceId, {
type: 'plan_broadcast',
plan
});
}
}
// 启动同步循环
private startSyncLoop(): void {
setInterval(async () => {
// 定期同步设备状态
for (const [deviceId, device] of this.devices) {
if (device.status === 'observing') {
const status = await this.deviceManager?.sendMessage(deviceId, {
type: 'status_query'
});
if (status) {
device.status = status.status || device.status;
}
}
}
}, this.syncInterval);
}
private addDevice(deviceInfo: distributedDeviceManager.DeviceInfo): void {
// 新设备上线
console.log(`Device online: ${deviceInfo.deviceId}`);
}
private removeDevice(deviceId: string): void {
this.devices.delete(deviceId);
console.log(`Device offline: ${deviceId}`);
}
getDevices(): TelescopeDevice[] {
return Array.from(this.devices.values());
}
getActivePlans(): ObservationPlan[] {
return Array.from(this.activePlans.values());
}
}3.5 悬浮观测导航(ObservationFloatNav.ets)
底部悬浮导航栏,实时显示观测目标、跟踪状态、曝光进度:
typescript
// entry/src/main/ets/components/ObservationFloatNav.ets
import { window } from '@kit.ArkUI';
import { ObservationTask, CelestialObject } from '../models/AstronomyDataModel';
interface ObservationNavItem {
id: string;
icon: string;
label: string;
status: 'idle' | 'tracking' | 'exposing' | 'processing' | 'complete';
}
@Component
export struct ObservationFloatNav {
@State currentIndex: number = 0;
@State navTransparency: number = 0.75;
@State isExpanded: boolean = false;
@State bottomAvoidHeight: number = 0;
@State currentTarget: string = '';
@State trackingStatus: 'idle' | 'tracking' | 'lost' = 'idle';
@State exposureProgress: number = 0;
@State totalExposures: number = 0;
@State currentExposure: number = 0;
@State exposureTime: number = 0;
@State remainingTime: number = 0;
@State pulseColor: string = '#06B6D4';
private navItems: ObservationNavItem[] = [
{ id: 'skymap', icon: '🌌', label: '星图', status: 'idle' },
{ id: 'target', icon: '🎯', label: '目标', status: 'idle' },
{ id: 'observe', icon: '🔭', label: '观测', status: 'idle' },
{ id: 'data', icon: '📊', label: '数据', status: 'idle' },
{ id: 'settings', icon: '⚙️', label: '设置', status: 'idle' }
];
private statusColors: Record<string, string> = {
idle: '#06B6D4', // 空闲:青色
tracking: '#F59E0B', // 跟踪:琥珀色
exposing: '#EF4444', // 曝光:红色
processing: '#8B5CF6', // 处理:紫色
complete: '#10B981' // 完成:绿色
};
aboutToAppear(): void {
this.getBottomAvoidArea();
// 监听观测状态变化
AppStorage.setOrCreate('observation_status_update', (status: any) => {
this.currentTarget = status.target || '';
this.trackingStatus = status.tracking || 'idle';
this.exposureProgress = status.progress || 0;
this.totalExposures = status.totalExposures || 0;
this.currentExposure = status.currentExposure || 0;
this.exposureTime = status.exposureTime || 0;
this.remainingTime = status.remainingTime || 0;
this.pulseColor = this.statusColors[status.status || 'idle'];
});
}
private async getBottomAvoidArea(): Promise<void> {
try {
const mainWindow = await window.getLastWindow();
const avoidArea = mainWindow.getWindowAvoidArea(window.AvoidAreaType.TYPE_NAVIGATION_INDICATOR);
this.bottomAvoidHeight = avoidArea.bottomRect.height;
} catch (error) {
console.error('Failed to get avoid area:', error);
}
}
build() {
Stack({ alignContent: Alignment.Bottom }) {
Column() {
// 主内容区域由父组件注入
}
.padding({ bottom: this.bottomAvoidHeight + 90 })
// 悬浮观测导航栏
Column() {
Stack() {
// 玻璃拟态背景
Column()
.width('100%')
.height('100%')
.backgroundBlurStyle(BlurStyle.REGULAR)
.opacity(this.navTransparency)
.backdropFilter($r('sys.blur.20'))
// 观测状态光效层
Column()
.width('100%')
.height('100%')
.linearGradient({
direction: GradientDirection.Top,
colors: [
[this.pulseColor + '20', 0.0],
['transparent', 0.6],
[this.pulseColor + '10', 1.0]
]
})
.animation({
duration: this.trackingStatus === 'tracking' ? 1000 : 3000,
curve: Curve.Linear,
iterations: -1
})
}
.width('100%')
.height('100%')
.borderRadius(28)
.shadow({
radius: 24,
color: this.pulseColor + '30',
offsetX: 0,
offsetY: -6
})
// 观测状态栏
Row() {
// 目标信息
Column({ space: 4 }) {
Text(this.currentTarget || '未选择目标')
.fontSize(12)
.fontColor('#ffffff')
.maxLines(1)
.textOverflow({ overflow: TextOverflow.Ellipsis })
if (this.trackingStatus !== 'idle') {
Text(this.trackingStatus === 'tracking' ? '跟踪中' : '目标丢失')
.fontSize(10)
.fontColor(this.trackingStatus === 'tracking' ? '#F59E0B' : '#EF4444')
}
}
.width(120)
// 曝光进度
if (this.totalExposures > 0) {
Column({ space: 4 }) {
Row({ space: 4 }) {
Text(`${this.currentExposure}/${this.totalExposures}`)
.fontSize(10)
.fontColor('#8899aa')
Progress({
value: this.exposureProgress,
total: 100,
type: ProgressType.Linear
})
.width(60)
.height(4)
.color(this.pulseColor)
.backgroundColor('#1a1a2e')
}
if (this.remainingTime > 0) {
Text(`${this.remainingTime}s`)
.fontSize(10)
.fontColor('#8899aa')
}
}
}
// 跟踪状态指示器
Column() {
if (this.trackingStatus === 'tracking') {
Stack() {
Circle()
.width(20)
.height(20)
.fill('transparent')
.stroke('#F59E0B')
.strokeWidth(2)
.strokeDashArray([10, 5])
.animation({
duration: 2000,
curve: Curve.Linear,
iterations: -1
})
Circle()
.width(8)
.height(8)
.fill('#F59E0B')
.shadow({
radius: 8,
color: '#F59E0B',
offsetX: 0,
offsetY: 0
})
}
} else if (this.trackingStatus === 'lost') {
Text('!')
.fontSize(14)
.fontColor('#EF4444')
.fontWeight(FontWeight.Bold)
}
}
.width(40)
.height(40)
}
.width('100%')
.height(40)
.padding({ left: 16, right: 16 })
.justifyContent(FlexAlign.SpaceBetween)
// 导航项
Row() {
ForEach(this.navItems, (item: ObservationNavItem, index: number) => {
Column() {
Stack() {
Text(item.icon)
.fontSize(24)
.fontColor(this.currentIndex === index ? this.pulseColor : '#666666')
// 状态指示器
if (item.status !== 'idle') {
Column()
.width(6)
.height(6)
.backgroundColor(this.statusColors[item.status])
.borderRadius(3)
.position({ x: 20, y: -4 })
.shadow({
radius: 4,
color: this.statusColors[item.status],
offsetX: 0,
offsetY: 0
})
}
}
.width(44)
.height(44)
Text(item.label)
.fontSize(11)
.fontColor(this.currentIndex === index ? this.pulseColor : '#999999')
.margin({ top: 4 })
}
.layoutWeight(1)
.onClick(() => {
this.currentIndex = index;
this.switchObservationView(item.id);
this.triggerHapticFeedback();
})
})
}
.width('100%')
.height(80)
.padding({ left: 20, right: 20 })
.justifyContent(FlexAlign.SpaceAround)
// 透明度调节(长按展开)
if (this.isExpanded) {
Row() {
Text('透明度')
.fontSize(12)
.fontColor('#666666')
.margin({ right: 12 })
Slider({
value: this.navTransparency * 100,
min: 50,
max: 90,
step: 10,
style: SliderStyle.InSet
})
.width(140)
.onChange((value: number) => {
this.navTransparency = value / 100;
})
Text(`${Math.round(this.navTransparency * 100)}%`)
.fontSize(12)
.fontColor('#666666')
.margin({ left: 12 })
}
.width('100%')
.height(44)
.justifyContent(FlexAlign.Center)
.backgroundColor('rgba(255,255,255,0.5)')
.borderRadius({ topLeft: 16, topRight: 16 })
}
}
.width('92%')
.height(this.isExpanded ? 164 : 80)
.margin({ bottom: this.bottomAvoidHeight + 16, left: '4%', right: '4%' })
.animation({
duration: 300,
curve: Curve.Spring,
iterations: 1
})
.gesture(
LongPressGesture({ duration: 500 })
.onAction(() => {
this.isExpanded = !this.isExpanded;
})
)
}
.width('100%')
.height('100%')
}
private async switchObservationView(viewId: string): Promise<void> {
AppStorage.setOrCreate('current_observation_view', viewId);
}
private triggerHapticFeedback(): void {
try {
import('@kit.SensorServiceKit').then(sensor => {
sensor.vibrator.startVibration({
type: 'time',
duration: 40
}, { id: 0 });
});
} catch (error) {
console.error('Haptic feedback failed:', error);
}
}
}四、沉浸光感与观测时段的协同设计
4.1 观测时段光效映射
| 观测时段 | 光色 | 脉冲节奏 | 应用场景 |
|---|---|---|---|
| 黄昏 | 橙色 #F59E0B |
渐亮呼吸(3s) | 日落到天文昏影终 |
| 深夜 | 深蓝色 #1E3A5F |
缓慢脉冲(5s) | 天文夜核心时段 |
| 黎明 | 紫色 #8B5CF6 |
渐暗呼吸(3s) | 天文晨光始到日出 |
| 曝光中 | 红色 #EF4444 |
心跳脉冲(1s) | 快门开启期间 |
| 跟踪中 | 琥珀色 #F59E0B |
旋转脉冲(2s) | 望远镜跟踪目标 |
| 数据处理 | 青色 #06B6D4 |
流光渐变(2s) | 图像叠加与处理 |
4.2 悬浮导航观测状态徽章
- 目标跟踪中:琥珀色旋转脉冲,显示跟踪精度
- 曝光进行中:红色心跳脉冲,显示剩余曝光时间
- 数据下载中:青色流动光效,显示传输进度
- 图像处理中:紫色流光,显示处理队列
- 观测完成:绿色常亮,显示成功帧数
五、关键技术总结
5.1 天文计算引擎开发清单
| 技术点 | API/方法 | 应用场景 |
|---|---|---|
| 星图渲染 | graphics.createRenderer({ backend: 'vulkan' }) |
十亿恒星实时渲染 |
| 天体坐标 | ICRS/J2000转换 | 赤经赤纬计算 |
| 星历表 | JPL星历表 | 行星/小行星位置 |
| 轨道力学 | 开普勒方程 | 轨道模拟 |
| 光谱分析 | 谱线识别算法 | 恒星分类 |
| 光变曲线 | 周期分析 | 变星识别 |
| NPU加速 | npu.createNPUContext() |
星表查询加速 |
5.2 深空目标识别开发清单
| 技术点 | API/方法 | 应用场景 |
|---|---|---|
| 图像分类 | mindSporeLite.createModelSession() |
天体类型识别 |
| 光谱分类 | 神经网络模型 | 恒星光谱类型 |
| 光变曲线 | 时序分析模型 | 变星分类 |
| 红移测量 | 谱线位移计算 | 星系距离 |
| 相似天体 | 向量检索 | 天体匹配 |
5.3 多设备协同观测开发清单
| 技术点 | API/方法 | 应用场景 |
|---|---|---|
| 设备发现 | distributedDeviceManager.createDeviceManager() |
望远镜阵列发现 |
| 能力查询 | 分布式消息 | 设备参数获取 |
| 计划广播 | deviceManager.sendMessage() |
协同计划分发 |
| 同步监控 | 定时状态查询 | 指向同步校正 |
| 数据融合 | NPU图像处理 | 叠加/拼接/立体 |
| 分布式存储 | distributedKVStore |
观测数据共享 |
5.4 沉浸光感实现清单
| 技术点 | API/方法 | 应用场景 |
|---|---|---|
| 时段光效 | linearGradient 动态颜色 |
黄昏/深夜/黎明氛围 |
| 曝光脉冲 | animation({ iterations: -1 }) |
快门状态指示 |
| 跟踪旋转 | rotate 动画 |
望远镜跟踪状态 |
| 玻璃拟态背景 | backgroundBlurStyle(BlurStyle.REGULAR) |
观测面板 |
| 安全区扩展 | expandSafeArea([SafeAreaType.SYSTEM], [...]) |
全屏沉浸布局 |
六、调试与性能优化建议
- 星表数据加载:建议使用分层LOD(Level of Detail),远处恒星用点精灵,近处用纹理
- NPU推理优化:天体分类模型建议量化至INT8,减少内存占用
- 分布式同步:望远镜阵列建议使用PTP(精确时间协议)同步,精度<1ms
- 曝光计算:根据目标星等、望远镜口径、相机QE自动计算最优曝光时间
- 大气消光:根据观测站海拔、目标高度角自动计算大气消光系数
- 月相规避:深空观测建议月相<30%,避免月光污染
- 无障碍支持:为视障用户增加星图语音描述,听障用户增加视觉化警报
七、结语
「星图罗盘」通过HarmonyOS 6的HMAF框架、NPU加速与沉浸光感特性,构建了首个原生OS级别的AI智能体天文观测与深空探索协作平台。十亿恒星的实时渲染、深空目标的智能识别、多望远镜的协同观测、AI天体物理分析,让天文观测从"孤军奋战"进化为"智能协作"。
随着我国"极致深空图"的发布与詹姆斯·韦伯望远镜的持续发现,未来的天文观测将更加依赖AI智能体的能力------从自动识别未知天体到预测超新星爆发,从优化观测计划到发现暗物质分布。这正是鸿蒙生态"万物智联"愿景在天文科学领域的深度实践,也是人类探索"星辰大海"的数字化新范式。
转载自:https://blog.csdn.net/u014727709/article/details/162396972
欢迎 👍点赞✍评论⭐收藏,欢迎指正