ATmega16超声波倒车雷达设计课程报告
1. 项目背景
随着汽车数量的增加,停车场景变得更加复杂,尤其是在狭窄的空间内停车时,司机往往难以判断车尾与障碍物之间的距离。超声波倒车雷达通过超声波传感器检测障碍物距离,并通过蜂鸣器和显示屏提示司机,有效地提高了倒车的安全性。本项目使用ATmega16单片机实现一个简单的超声波倒车雷达系统,通过超声波测距传感器获取距离数据,并在LCD显示屏上显示距离,同时通过蜂鸣器提示距离的远近。
2. 系统概述
2.1 系统组成
- ATmega16单片机:核心控制器,负责超声波测距、数据处理和显示控制。
- 超声波传感器:用于发射和接收超声波信号,测量障碍物距离。
- LCD1602显示屏:显示障碍物距离信息。
- 蜂鸣器:根据距离的远近发出不同频率的报警声,提示司机。
2.2 系统原理
- 超声波测距:超声波传感器通过发射超声波并接收反射波,计算超声波往返时间,从而得到障碍物的距离。
- 数据处理:ATmega16单片机通过计时器记录超声波信号的往返时间,并根据公式计算距离。
- 显示与报警:距离数据通过LCD1602显示屏实时显示,同时根据距离的远近通过蜂鸣器发出不同频率的报警声。
3. 硬件设计
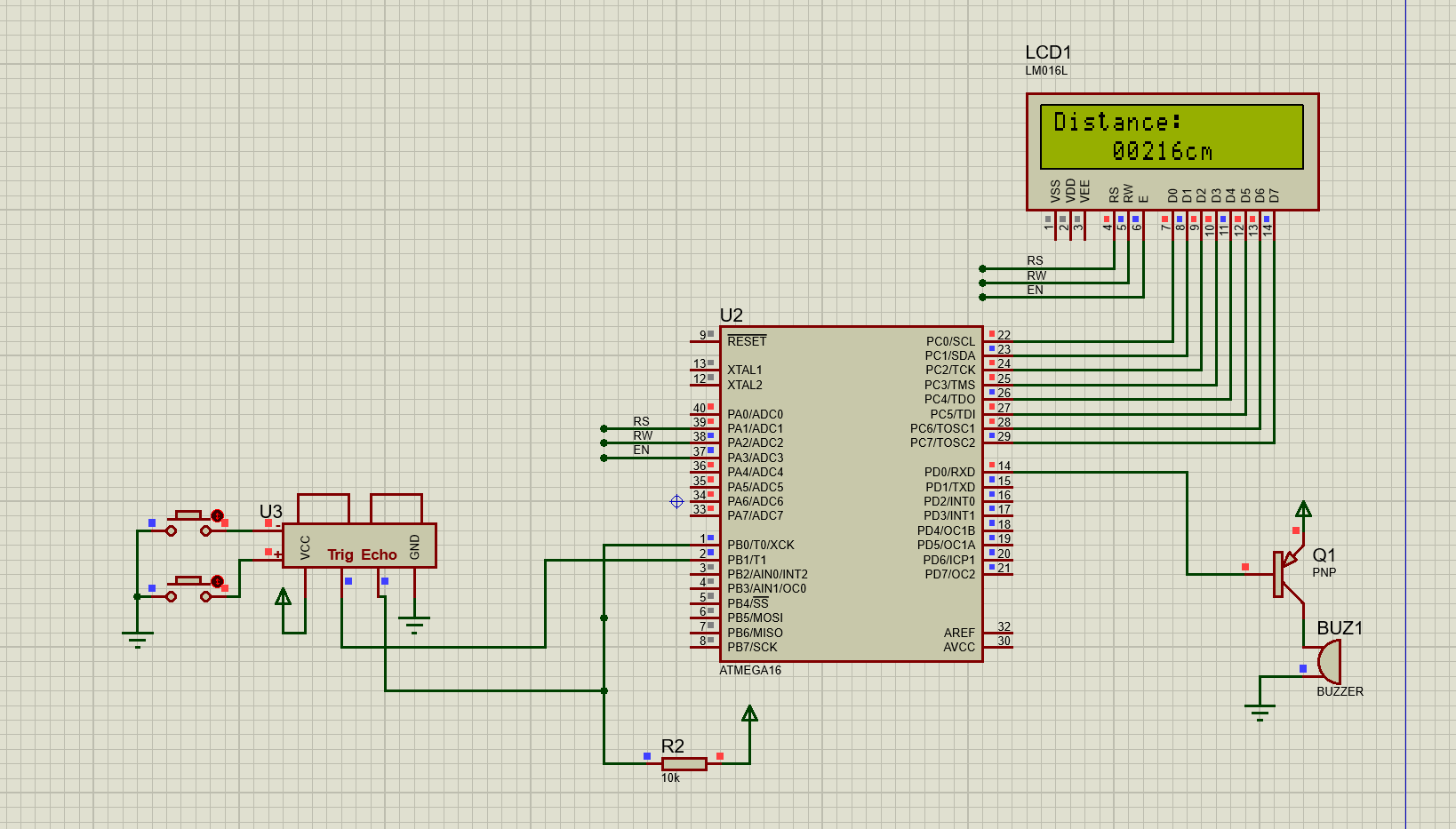
3.1 硬件连接
-
超声波传感器:
- TRIG(触发端)连接到ATmega16的PB1,用于发射超声波。
- ECHO(回波端)连接到ATmega16的PB0,用于接收反射回来的超声波信号。
-
LCD1602显示屏:
- 数据端口和控制端口连接到单片机的PORTD,用于显示距离信息。
-
蜂鸣器:
- 连接到ATmega16的PD0,用于发出报警声。
3.2 硬件配置
-
I/O口配置:
- 将PB1配置为输出模式,用于触发超声波发射。
- 将PB0配置为输入模式,用于接收超声波反射信号。
- 将PORTD配置为输出模式,用于驱动LCD显示屏和蜂鸣器。
-
定时器配置:
- 使用定时器0进行计时,记录超声波信号的往返时间。
4. 软件设计
4.1 功能模块
- 初始化模块:初始化LCD显示屏、超声波传感器及定时器。
- 测距模块:通过超声波传感器测量障碍物距离。
- 显示模块:在LCD1602显示屏上实时显示障碍物距离。
- 报警模块:根据距离的远近,通过蜂鸣器发出不同频率的报警声。
4.2 主要函数
- delay_ms():毫秒级延时函数,用于实现延时操作。
- delay_10us():微秒级延时函数,用于超声波触发信号。
- dispaly():显示距离信息到LCD1602显示屏上。
- timer0_ovf():定时器0溢出中断服务函数,用于记录计时器溢出次数。
- main():主函数,初始化系统并实现主控制流程。
4.3 系统流程
- 系统初始化:初始化LCD显示屏、超声波传感器及定时器,并显示初始信息。
- 距离测量:通过触发超声波传感器,测量障碍物距离,并计算距离值。
- 显示距离:将计算的距离值显示在LCD1602显示屏上。
- 报警控制:根据距离的远近,通过蜂鸣器发出不同频率的报警声。
5. 详细实现
5.1 延时函数
实现毫秒级和微秒级延时,用于控制超声波触发信号和系统延时:
c
void delay_ms(int time) {
int i;
for (; time > 0; time--)
for (i = 0; i < 1000; i++)
;
}
void delay_10us(void) {
int i;
for (i = 0; i < 500; i++)
;
}5.2 显示函数
将距离值显示在LCD1602显示屏上:
c
void dispaly(void) {
unsigned char cnt;
LCD_write_str(0, 0, "Distance:");
cnt = 0;
xianshi[cnt++] = distance % 100000 / 10000 + '0';
xianshi[cnt++] = distance % 10000 / 1000 + '0';
xianshi[cnt++] = distance % 1000 / 100 + '0';
xianshi[cnt++] = distance % 100 / 10 + '0';
xianshi[cnt++] = distance % 10 + '0';
xianshi[cnt++] = 'c';
xianshi[cnt++] = 'm';
xianshi[cnt++] = 0;
LCD_write_str(4, 1, xianshi);
}5.3 定时器中断服务函数
记录定时器溢出次数,用于计算超声波信号的往返时间:
c
#pragma interrupt_handler timer0_ovf:10
void timer0_ovf(void) {
sr4_time_cnt++;
if (sr4_time_cnt == 1000)
sr4_time_cnt = 0;
}5.4 主函数
初始化系统,测量距离并控制显示和报警:
c
void main(void) {
while (1) {
delay_ms(10);
sys_t++;
if (sys_t == 20) {
sys_t = 0;
sr4_time_cnt = 0; // 中断溢出次数
sr4_time = 0; // 时间
TCNT0 = 0; // 给定时器赋初值
PORTB |= 0x02; // PB1输出高电平 trig
delay_10us(); // 延时10us
PORTB &= (~0x02); // PB1输出低电平 trig
while ((PINB & 0x01) == 0); // PB0 echo==0的时候一直停在这里等
TCCR0 = 0x01; // 配置定时器工作普通模式
while (PINB & 0x01); // PB0 echo==1的时候一直停在这里等
TCCR0 = 0x00; // 配置定时器 不工作
sr4_time = 255 * sr4_time_cnt + TCNT0; // 往返时间 单位us
distance = sr4_time * 0.0173 + 1; // 计算距离 单位cm
dispaly();
if (distance < 200) {
prio = distance / 20; // prio就是档次 每20cm是一个档次
}
}
if (distance < 200) {
sys_tt++;
if (sys_tt > prio) { // prio越小 声音就越急促
sys_tt = 0;
PORTD &= ~0X01; // 打开蜂鸣器
delay_ms(10);
PORTD |= 0X01; // 关闭蜂鸣器
}
} else {
PORTD |= 0X01; // 打开蜂鸣器
}
}
}6. 总结
通过本项目的设计与实现,学习者可以深入理解超声波测距的原理和应用,掌握ATmega16单片机的硬件配置及编
资源
https://docs.qq.com/sheet/DUEdqZ2lmbmR6UVdU?u=bdf8eeb84961492ba2b62f7bfee641ea&tab=BB08J2