环境简介
硬件环境
ESP32、光照传感器、温湿度传感器、继电器、蜂鸣器
基本工作流程
- 上位机先运行,下位机启动后尝试连接上位机
- 连接成功后定时上报传感器数据到上位机,上位机将信息进行处理展示
- 判断下位机传感器数据,如果超过设置的阈值,则下发控制命令控制下位机硬件
- 点击上位机控制按钮,即可下发控制指令控制硬件
上位机运行效果

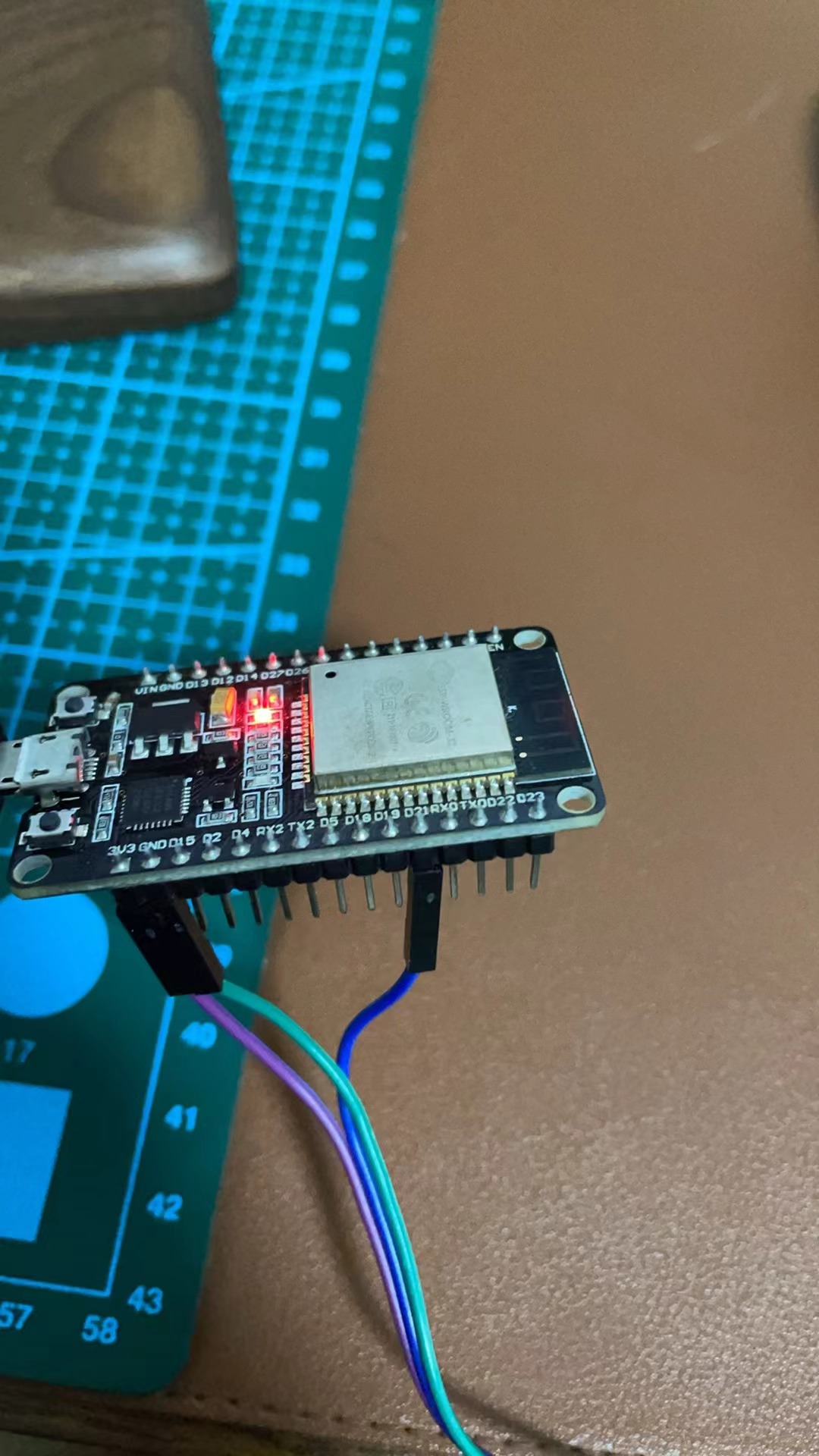
硬件连接图

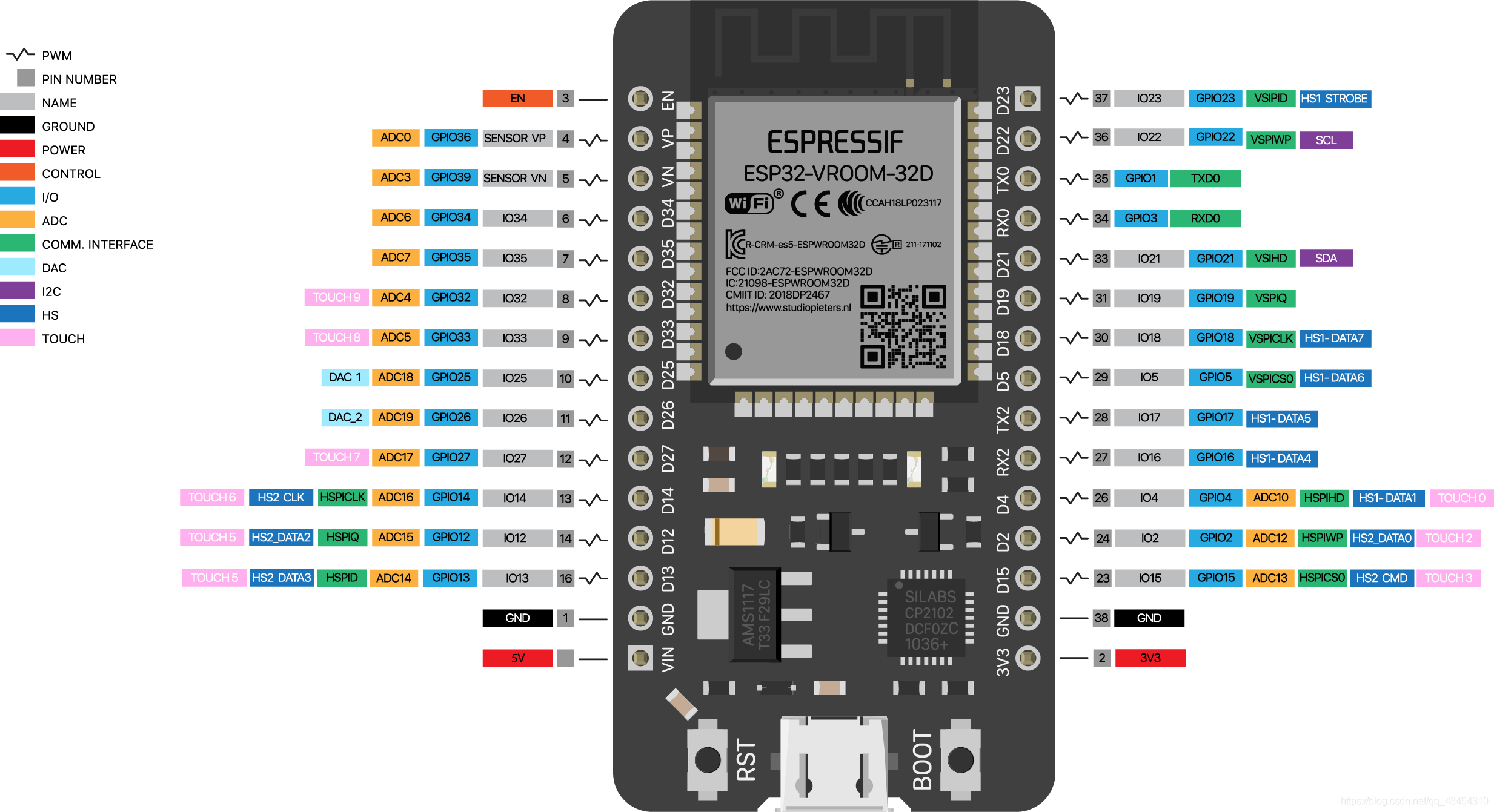
DHT11 温湿度传感器
接线图
VCC 3V3
GND GND
DATA GPIO21(D21)
读取代码
#include <stdio.h>
#include "freertos/FreeRTOS.h"
#include "freertos/task.h"
#include "driver/gpio.h"
#include "sdkconfig.h"
#define DHT11_PIN (21) //可通过宏定义,修改引脚
#define DHT11_CLR gpio_set_level(DHT11_PIN, 0)
#define DHT11_SET gpio_set_level(DHT11_PIN, 1)
#define DHT11_IN gpio_set_direction(DHT11_PIN, GPIO_MODE_INPUT)
#define DHT11_OUT gpio_set_direction(DHT11_PIN, GPIO_MODE_OUTPUT)
uint8_t DHT11Data[4]={0};
uint8_t Temp, Humi;
//us延时函数,误差不能太大
void DelayUs( uint32_t nCount)
{
ets_delay_us(nCount);
}
void DHT11_Start(void)
{
DHT11_OUT; //设置端口方向
DHT11_CLR; //拉低端口
DelayUs(19*1000);
// vTaskDelay(19 * portTICK_RATE_MS); //持续最低18ms;
DHT11_SET; //释放总线
DelayUs(30); //总线由上拉电阻拉高,主机延时30uS;
DHT11_IN; //设置端口方向
while(!gpio_get_level(DHT11_PIN)); //DHT11等待80us低电平响应信号结束
while(gpio_get_level(DHT11_PIN));//DHT11 将总线拉高80us
}
uint8_t DHT11_ReadValue(void)
{
uint8_t i,sbuf=0;
for(i=8;i>0;i--)
{
sbuf<<=1;
while(!gpio_get_level(DHT11_PIN));
DelayUs(30); // 延时 30us 后检测数据线是否还是高电平
if(gpio_get_level(DHT11_PIN))
{
sbuf|=1;
}
else
{
sbuf|=0;
}
while(gpio_get_level(DHT11_PIN));
}
return sbuf;
}
uint8_t DHT11_ReadTemHum(uint8_t *buf)
{
uint8_t check;
buf[0]=DHT11_ReadValue();
buf[1]=DHT11_ReadValue();
buf[2]=DHT11_ReadValue();
buf[3]=DHT11_ReadValue();
check =DHT11_ReadValue();
if(check == buf[0]+buf[1]+buf[2]+buf[3])
return 1;
else
return 0;
}
void app_main(void)
{
printf("ESP32 DHT11 TEST:%s,%s!\r\n",__DATE__,__TIME__);
gpio_pad_select_gpio(DHT11_PIN);
while(1) {
DHT11_Start();
if(DHT11_ReadTemHum(DHT11Data))
{
Temp=DHT11Data[2];
Humi=DHT11Data[0];
printf("Temp=%d, Humi=%d\r\n",Temp,Humi);
}
else
{
printf("DHT11 Error!\r\n");
}
vTaskDelay(1000); //目前10s读取一次
}
}TEMT6000
接线图
VCC VCC
GND GND
OUT GPIO34(D34)
读取代码
#include "driver/gpio.h"
#include "driver/adc.h"
#include "esp_adc_cal.h"
#include "freertos/FreeRTOS.h"
#include "freertos/task.h"
// ADC所接的通道 GPIO34 if ADC1 = ADC1_CHANNEL_6
#define ADC1_TEST_CHANNEL ADC1_CHANNEL_6
// ADC斜率曲线
static esp_adc_cal_characteristics_t *adc_chars;
// 参考电压
#define DEFAULT_VREF 3300 //使用adc2_vref_to_gpio()获得更好的估计值
void check_efuse(void)
{
//检查TP是否烧入eFuse
if (esp_adc_cal_check_efuse(ESP_ADC_CAL_VAL_EFUSE_TP) == ESP_OK) {
printf("eFuse Two Point: Supported\n");
} else {
printf("eFuse Two Point: NOT supported\n");
}
//检查Vref是否烧入eFuse
if (esp_adc_cal_check_efuse(ESP_ADC_CAL_VAL_EFUSE_VREF) == ESP_OK) {
printf("eFuse Vref: Supported\n");
} else {
printf("eFuse Vref: NOT supported\n");
}
}
void adc_init(void)
{
adc1_config_width(ADC_WIDTH_BIT_12);// 12位分辨率
adc1_config_channel_atten(ADC1_TEST_CHANNEL, ADC_ATTEN_DB_11);// 电压输入衰减
adc_chars = calloc(1, sizeof(esp_adc_cal_characteristics_t)); // 为斜率曲线分配内存
esp_adc_cal_value_t val_type = esp_adc_cal_characterize(ADC_UNIT_1, ADC_ATTEN_DB_11, ADC_WIDTH_BIT_12, DEFAULT_VREF, adc_chars);
// print_char_val_type(val_type);
}
void app_main(void)
{
uint32_t read_raw;
check_efuse();
adc_init();
while(1){
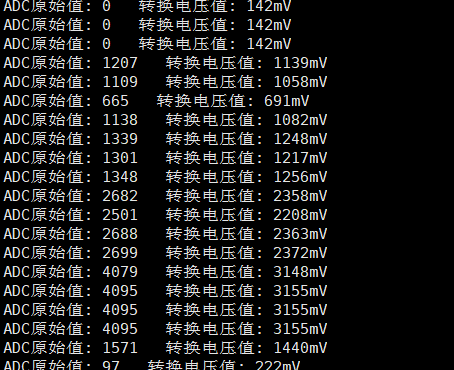
read_raw = adc1_get_raw(ADC1_TEST_CHANNEL);// 采集ADC原始值//这里可以多次采样取平均值
uint32_t voltage = esp_adc_cal_raw_to_voltage(read_raw, adc_chars);//通过一条斜率曲线把读取adc1_get_raw()的原始数值转变成了mV
printf("ADC原始值: %d 转换电压值: %dmV\n", read_raw, voltage);
vTaskDelay(1000 / portTICK_RATE_MS);
}
}延时1s
- 1200 手电筒1档
- 2688 手电筒2档
- 4079 手电筒3档
烟雾传感器
接线图
|-----|--------|
| 3V3 | VCC |
| GND | GND |
| DO | GPIO15 |
| AO | GPIO2 |
读取代码
/* ADC1 Example
This example code is in the Public Domain (or CC0 licensed, at your option.)
Unless required by applicable law or agreed to in writing, this
software is distributed on an "AS IS" BASIS, WITHOUT WARRANTIES OR
CONDITIONS OF ANY KIND, either express or implied.
*/
#include <stdio.h>
#include <stdlib.h>
#include "freertos/FreeRTOS.h"
#include "freertos/task.h"
#include "driver/gpio.h"
#include "driver/adc.h"
#include "esp_adc_cal.h"
#define DEFAULT_VREF 1100 //Use adc2_vref_to_gpio() to obtain a better estimate
#define NO_OF_SAMPLES 64 //Multisampling
static esp_adc_cal_characteristics_t *adc_chars;
#if CONFIG_IDF_TARGET_ESP32
static const adc_channel_t channel = ADC_CHANNEL_6; //GPIO34 if ADC1, GPIO14 if ADC2
static const adc_bits_width_t width = ADC_WIDTH_BIT_12;
#elif CONFIG_IDF_TARGET_ESP32S2
static const adc_channel_t channel = ADC_CHANNEL_6; // GPIO7 if ADC1, GPIO17 if ADC2
static const adc_bits_width_t width = ADC_WIDTH_BIT_13;
#endif
static const adc_atten_t atten = ADC_ATTEN_DB_0;
static const adc_unit_t unit = ADC_UNIT_1;
static void check_efuse(void)
{
#if CONFIG_IDF_TARGET_ESP32
//Check if TP is burned into eFuse
if (esp_adc_cal_check_efuse(ESP_ADC_CAL_VAL_EFUSE_TP) == ESP_OK) {
printf("eFuse Two Point: Supported\n");
} else {
printf("eFuse Two Point: NOT supported\n");
}
//Check Vref is burned into eFuse
if (esp_adc_cal_check_efuse(ESP_ADC_CAL_VAL_EFUSE_VREF) == ESP_OK) {
printf("eFuse Vref: Supported\n");
} else {
printf("eFuse Vref: NOT supported\n");
}
#elif CONFIG_IDF_TARGET_ESP32S2
if (esp_adc_cal_check_efuse(ESP_ADC_CAL_VAL_EFUSE_TP) == ESP_OK) {
printf("eFuse Two Point: Supported\n");
} else {
printf("Cannot retrieve eFuse Two Point calibration values. Default calibration values will be used.\n");
}
#else
#error "This example is configured for ESP32/ESP32S2."
#endif
}
static void print_char_val_type(esp_adc_cal_value_t val_type)
{
if (val_type == ESP_ADC_CAL_VAL_EFUSE_TP) {
printf("Characterized using Two Point Value\n");
} else if (val_type == ESP_ADC_CAL_VAL_EFUSE_VREF) {
printf("Characterized using eFuse Vref\n");
} else {
printf("Characterized using Default Vref\n");
}
}
void app_main(void)
{
//Check if Two Point or Vref are burned into eFuse
check_efuse();
//Configure ADC
if (unit == ADC_UNIT_1) {
adc1_config_width(width);
adc1_config_channel_atten(channel, atten);
} else {
adc2_config_channel_atten((adc2_channel_t)channel, atten);
}
//Characterize ADC
adc_chars = calloc(1, sizeof(esp_adc_cal_characteristics_t));
esp_adc_cal_value_t val_type = esp_adc_cal_characterize(unit, atten, width, DEFAULT_VREF, adc_chars);
print_char_val_type(val_type);
//Continuously sample ADC1
while (1) {
uint32_t adc_reading = 0;
//Multisampling
for (int i = 0; i < NO_OF_SAMPLES; i++) {
if (unit == ADC_UNIT_1) {
adc_reading += adc1_get_raw((adc1_channel_t)channel);
} else {
int raw;
adc2_get_raw((adc2_channel_t)channel, width, &raw);
adc_reading += raw;
}
}
adc_reading /= NO_OF_SAMPLES;
//Convert adc_reading to voltage in mV
uint32_t voltage = esp_adc_cal_raw_to_voltage(adc_reading, adc_chars);
printf("Raw: %d\tVoltage: %dmV\n", adc_reading, voltage);
vTaskDelay(pdMS_TO_TICKS(1000));
}
}蜂鸣器
接线图
VCC VCC
GND GND
I/O D2(GPIO2)
设置代码
#include <stdio.h>
#include <stdlib.h>
#include <unistd.h>
#include "driver/gpio.h"
#define LED_PIN 2
void app_main(void)
{
gpio_reset_pin(LED_PIN); //引脚复位
gpio_pad_select_gpio(LED_PIN); //GPIO引脚功能选择
gpio_set_direction(LED_PIN, GPIO_MODE_OUTPUT); //设置方向为输出
while (1)
{
gpio_set_level(LED_PIN,1); //设置LED_PIN为高电平
sleep(1);
gpio_set_level(LED_PIN,0); //设置LED_PIN为低电平
sleep(1);
}
}继电器
DC+(VCC) 接 1口
DC- (GND)接 6 口
IN1 接 7 口