【Unity】投影矩阵和线性深度推导
网络上有很多投影矩阵的推导,也有很多声称是基于 Unity 的,但和我的实测都不一致(现在看来是因为这些文章并不全面),此外有一些 Unity 本身的函数我也搞不懂它的原理,遂最终选择自行研究,总算把这些问题解决了。
现在通过这篇文章,你就可以完全搞懂 Unity 的投影矩阵是啥样,又是怎么来的。以及 Unity 逆推线性深度的函数是如何实现的。不过该文章也不是完全面向小白的,至少你应该对这些矩阵本来就有大概的了解。
渲染中的矩阵变换
渲染过程中将模型顶点转换到显卡设备的 NDC(标准设备坐标系)中,共要进行以下几个矩阵变换:
- 物体到世界空间矩阵(物体矩阵)
- 世界到视图空间矩阵(视图矩阵)
- 视图到剪辑空间(采用齐次坐标的 NDC 空间)矩阵(投影矩阵)
物体到世界空间矩阵就是正常的 TRS(转移,旋转,缩放)矩阵,不是本文的研究对象,在 Unity 中主要是"视图矩阵"和"投影矩阵"有特殊的地方。
视图矩阵
视图矩阵本质就是不受缩放影响的相机的 TRS 矩阵的逆矩阵。除此之外,在 Unity 中该矩阵还有个特别的地方。
虽然 Unity 是左手坐标系引擎,但它的视图空间却是用的右手坐标系的(z 轴正负与左手坐标系相反),更官方的表述是 Unity 采用的是 opengl 风格的视图矩阵。故最终会对 z 轴进行反转,使相机正前方为-z(即会对矩阵中的 m33 (z 轴系数)取反)。
虽然这一操作让人感觉有些不适,但也便于了我们后续将深度计算为 D3D 风格的 1-0(越远深度值越小),而不是传统风格的 0-1(越远深度值越大)。
投影矩阵
投影矩阵用于将视图矩阵的结果转换到剪辑空间,但具体根据当前所使用的图形 API 不同,其投影矩阵和 NDC 都会有所差异:
https://docs.unity.cn/cn/2022.3/Manual/SL-PlatformDifferences.html
对于 NDC 的 x,y 轴,全平台都是一致的:
- 屏幕从左到右为 x 轴的-1 到 1
- 屏幕从下到上为 y 轴的-1 到 1
对于 NDC 的 z 轴,即视图空间下的近平面到远平面的 z 轴:
- 在 OpenGL 平台:屏幕从前到后为 z 轴的-1 到 1
- 在 Direct3D 平台:屏幕从前到后为 z 轴的 1 到 0
如果是从相机中直接获取投影矩阵(Camera.projectionMatrix),Unity 始终返回 OpenGL 风格。但若想获取着色器中实际使用的矩阵,则需要调用GL.GetGPUProjectionMatrix,而该矩阵会随图形 API 不同而不同。
综上所述,投影矩阵在 Unity 中有多种实现方式,但考虑 Unity 的深度图是采用 Direct3D 风格存储的(包括那些解算深度图的函数),而且 Windows 平台更常用,故在此仅推导 Direct3D 风格的透视矩阵。
投影矩阵的构成
投影矩阵有两种类型:
- "正交投影"(不实现近大远小)
- "透视投影"(实现近大远小)。
其中透视投影比较特殊,本质上是"正交"和"透视"两种变换的复合矩阵:
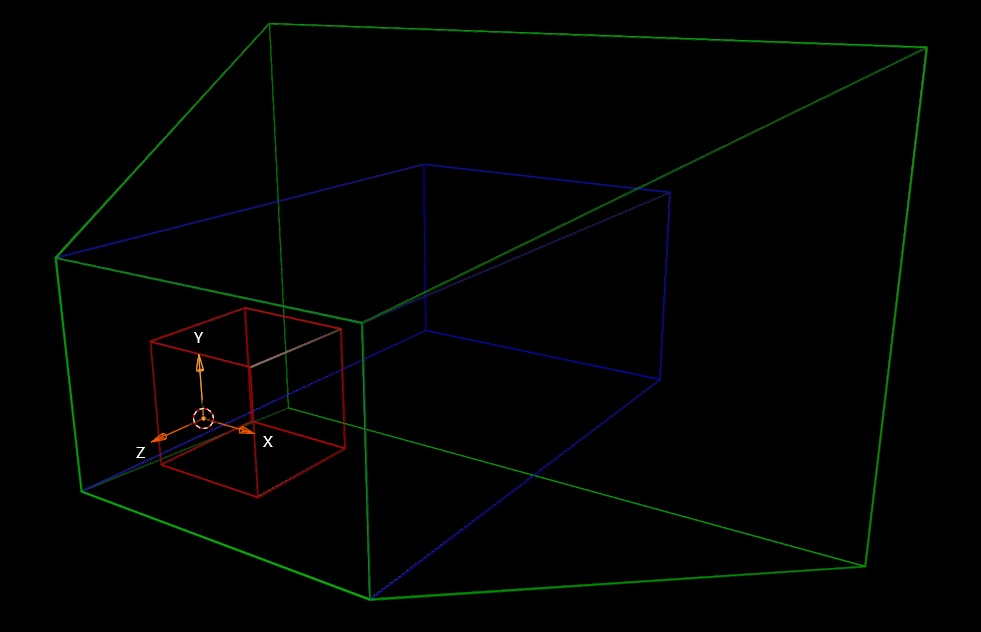
- 透视(上图绿框变蓝框):将锥形的视野范围缩放成长方体。
- 正交(上图蓝框变红框):将长方体的视野范围缩放到 NDC 空间(也是长方体)。
因此只需要学会透视投影,也就能学会正交投影,而且这样子理解起来会更简单。
正交变换(等价于正交投影矩阵)
正交投影矩阵由以下参数构成:
- size:视锥体半高度。
- aspect:宽高比(宽度/高度),用于得出半宽度。
- near:近平面位置。
- far:远平面位置。
由这些参数可以简单得出以下变量:
- h:半高度(size)
- w:半宽度(size*aspect)
- n:近平面(near)
- f:远平面(far)
正交投影矩阵是线性变换,所以可以直接通过直线公式(\(y=Ax+B\))来拟合(如下图),具体而言是要实现以下映射:

- \((-w,w)=>(-1,1)\)
- \((-h,h)=>(-1,1)\)
- \((-n,-f)=>(1,0)\)(受视图矩阵的 z 反转影响,故远近平面取反)
对于第一第二点,只要设置直线斜率(即对输入的 x,y 坐标直接除以 w,h 即可)。对于第三点则可以通过带入 z=-n 和 z=-f 两个线段端点成以下公式:
- \(-An+B=1\)
- \(-Af+B=0\)
进一步推导可得:
\( \begin{aligned} (-An+B)-(-Af+B) &= 1-0 \\ -An+B+Af-B &= 1 \\ Af-An &= 1 \\ A(f-n) &= 1 \\ A &= \frac{1}{f-n} \\ \end{aligned} \)
\( \begin{aligned} -(\frac{1}{f-n})f+B&=0\\ B &= \frac{f}{f-n}\\ \end{aligned} \)
最终根据上述结论,可用相关参数可构成正交投影矩阵:
\\\begin{bmatrix} \\frac{1}{w} \& 0 \& 0 \& 0 \\\\ 0 \& \\frac{1}{h} \& 0 \& 0 \\\\ 0 \& 0 \& \\frac{1}{f-n} \& \\frac{f}{f-n} \\\\ 0 \& 0 \& 0 \& 1 \\\\ \\end{bmatrix} \\
透视变换(透视投影矩阵的一部分)
透视变换(后也称透视矩阵)的目的是实现近大远小,即根据 z 位置缩放 xy 轴,使任何位置的 x,y 都等于近平面的 x',y'(映射关系如下图)。

上图根据相似三角形定理可得对于 y 轴的透视变换如下公式:
\( \begin{aligned} \frac{y'}{n} &=\frac{y}{z} (n,z此处为长度,故不是负数)\\ y'&=\frac{yn}{z}\\ x'&=\frac{xn}{z}(x轴同理) \end{aligned} \)
现在要将上述公式反应在矩阵变换上:
- 对于 n,这是一个定值,直接利用缩放矩阵的原理就可以实现。
- 对于 z,这是一个变量,肯定无法直接写在矩阵中,但可以借助其次坐标 w 归一化的特性,将向量的 w (位置在 m43)设为 z 即可。
于是便可得出初步矩阵:
\( \begin{bmatrix} n & 0 & 0 & 0 \\ 0 & n & 0 & 0 \\ ? & ? & ? & ? \\ 0 & 0 & -1 & 0 \end{bmatrix} \)
注意因为视图矩阵中 z 被反转,此处为保证 xy 不受影响,因此需要将 m43 设置为 -1 来获取 +z。
此外 z 的系数都被标记为?,因为 z 也会受 w 归一的影响,而我们实际需要 z 保持不变,故需要对这些能对 z 产生作用的系数进行推导,以确保最终计算出的向量归一化前的 z 分量为\(-z^2\)(齐次坐标是实现除 z 而不是-z,所以为保持最终结果依然是视图空间的 -z ,z 分量应该是负数 z)。
由于前两个系数(m31,m32)是与 x,y 相乘,我们不需要所以始终为 0。而剩余的两个系数(m33,m34)设分别为 A,B 时,再加上视图空间向量(投影变换的输入向量)的 w 分量(B 的乘数)默认为 1,带入 z=-n 和 z=-f 两个特例后可得以下公式:
- \(-An+B=-n^2\)
- \(-Af+B=-f^2\)
推导可得:
\( \begin{aligned} (-An+B)-(-Af+B) &= (-n^2)-(-f^2) \\ -An+B+Af-B &= f^2-n^2 \\ Af-An &= (f-n)(f+n) \\ A(f-n) &= (f-n)(f+n) \\ A &= f+n \\ \end{aligned} \)
\( \begin{aligned} -(f+n)f+B&=-f^2\\ B &= -f^2+(f+n)f\\ B &= -f^2+f^2+nf\\ B &= nf\\ \end{aligned} \)
最终根据上述结论,可用相关参数可构成透视矩阵:
\\\begin{bmatrix} n \& 0 \& 0 \& 0 \\\\ 0 \& n \& 0 \& 0 \\\\ 0 \& 0 \& f+n \& nf \\\\ 0 \& 0 \& -1 \& 0 \\\\ \\end{bmatrix} \\
透视投影矩阵
将正交变换和透视变换的矩阵相结合可得如下矩阵:
\( \begin{aligned} &=\begin{bmatrix} \frac{1}{w} & 0 & 0 & 0 \\ 0 & \frac{1}{h} & 0 & 0 \\ 0 & 0 & \frac{1}{f-n} & \frac{f}{f-n} \\ 0 & 0 & 0 & 1 \\ \end{bmatrix} *\begin{bmatrix} n & 0 & 0 & 0 \\ 0 & n & 0 & 0 \\ 0 & 0 & f+n & nf \\ 0 & 0 & -1 & 0 \\ \end{bmatrix}\\ &=\begin{bmatrix} \frac{n}{w} & 0 & 0 & 0 \\ 0 & \frac{n}{h} & 0 & 0 \\ 0 & 0 & \frac{f+n}{f-n}-\frac{f}{f-n} & \frac{nf}{f-n} \\ 0 & 0 & -1 & 0 \\ \end{bmatrix}\\ &=\begin{bmatrix} \frac{n}{w} & 0 & 0 & 0 \\ 0 & \frac{n}{h} & 0 & 0 \\ 0 & 0 & \frac{n}{f-n} & \frac{nf}{f-n} \\ 0 & 0 & -1 & 0 \\ \end{bmatrix} \end{aligned} \)
在透视投影中,Unity 不直接提供 h(半高),需要利用 fov(视野角度)计算。利用三角函数可以轻松得出:
\( h = \tan(fov/2)*n\\ w = h * aspect \)
重新整理后可得最终透视投影矩阵:
\\\begin{bmatrix} \\frac{1}{\\tan(fov/2)\*aspect} \& 0 \& 0 \& 0 \\\\ 0 \& \\frac{1}{\\tan(fov/2)} \& 0 \& 0 \\\\ 0 \& 0 \& \\frac{near}{far-near} \& \\frac{near\*far}{far-near} \\\\ 0 \& 0 \& -1 \& 0 \\\\ \\end{bmatrix} \\
线性深度推导
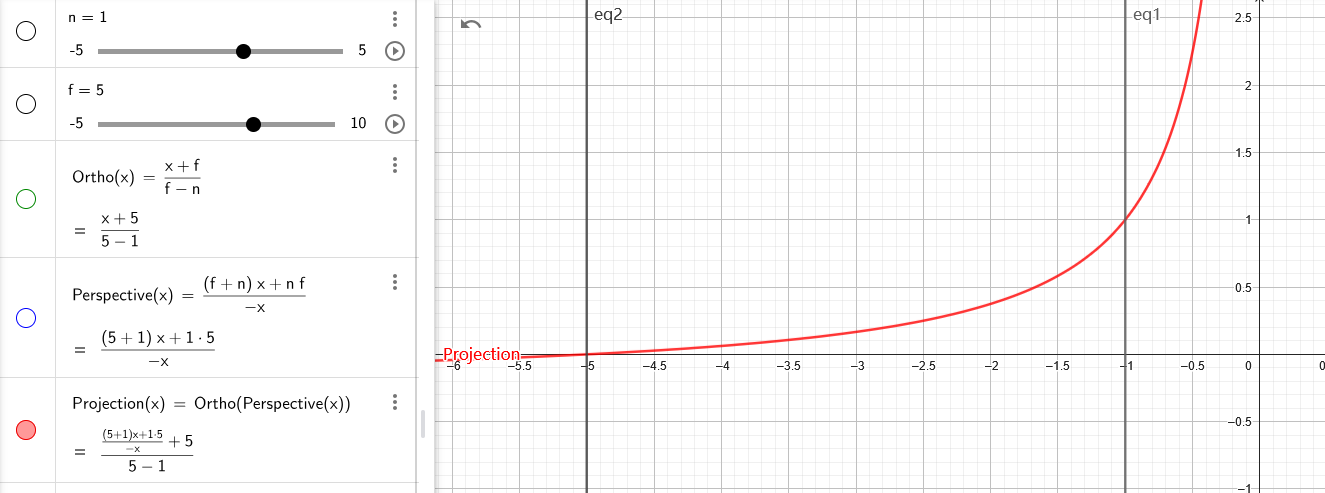
经过透视投影后得到的深度不是线性的(如上图),但很多特效实现都有利用 NDC 深度重建世界信息的需求,因此还需要研究一下如何逆推得到线性深度。
以下都是对 Unity 中相关线性深度求解函数的解析,利用下方链接可以查看每个函数的函数图,以便直观的感受深度变化效果:
https://www.geogebra.org/calculator/nxrfrkzj
LinearEyeDepth
将 NDC 中的深度反推为视图空间中的非反转深度(即原始的 z 轴坐标)。
该函数的实现可分成两个步骤,先执行 \(透视投影\) 的 \(逆函数\) 得出视图空间中的深度。由于视图空间中的深度为反转的 z 轴,故对该深度二次反转,以得到非反转深度。
即 \(LinearEyeDepth(z) = -逆透视投影(z)\)
-
根据之前的矩阵计算可得:
\( \begin{aligned} 透视投影 &= \frac{(\frac{nz}{f-n}+\frac{nf}{f-n})}{-z}\\ &=\frac{n(z+f)}{z(n-f)}\\ \end{aligned} \)
-
再对该函数求逆:
\( \begin{aligned} z'&=\frac{n(z+f)}{z(n-f)} \\ z(n-f)z'&=nz+nf\\ z(n-f)z'-nz&=nf\\ z((n-f)z'-n)&=nf\\ z&=\frac{nf}{(n-f)z'-n}\\ \end{aligned} \)
即:
\( 逆透视投影=\frac{nf}{(n-f)z-n} \)
-
加入反转,再简化:
\( \begin{aligned} &= -\frac{nf}{(n-f)z-n}\\ &= \frac{nf}{(f-n)z+n}\\ &= \frac{1}{\frac{f-n}{nf}z+\frac{1}{f}}\\ \end{aligned} \)
故最终结论为:
\LinearEyeDepth(z)=\\frac{1}{\\frac{f-n}{nf}z+\\frac{1}{f}} \\
Linear01Depth
将 NDC 中的深度反推为线性 0-1 深度(相机位置为 0,远平面为 1)。
很容易想到,只需要对 \(LinearEyeDepth\) 的结果除以远平面大小即可,即:
\( \begin{aligned} &= \frac{LinearEyeDepth(z)}{f}\\ &= \frac{1}{\frac{f-n}{nf}z+\frac{1}{f}} * \frac{1}{f}\\ &= \frac{1}{\frac{f-n}{n}z+1}\\ \end{aligned} \)
故最终结论为:
\Linear01Depth(z)=\\frac{1}{\\frac{f-n}{n}z+1} \\
Linear01DepthFromNear
求解线性 0-1 深度(近平面为 0,远平面为 1)。(Unity 中的注释是这样写的,但实测根本不是)。
该函数的本质为:
\( \begin{aligned} &=Linear01Depth(z)*z\\ &=\frac{1}{\frac{f-n}{n}z+1}*z\\ &=\frac{1}{\frac{f-n}{n}+\frac{1}{z}}\\ \end{aligned} \)
其计算出的深度确实是线性,但近平面等于 \(Linear01Depth\)(z 等于 1,相乘后不变),远平面等于 0(z 等于 0,相乘后等于 0)。
若要实现真正的 \(Linear01DepthFromNear\) ,应对 \(逆透视投影函数\) 的结果直接进行 \(正交变换\),然后调换深度为 0-1 方向,即:
\( \begin{aligned} &= 1 - 正交变换(逆透视投影(z))\\ &= 1-\frac{1}{f-n}LinearEyeDepth(z)+\frac{f}{f-n}\\ &= 1-\frac{1}{f-n}(\frac{nf}{(n-f)z-n}+f)\\ \end{aligned} \)