近期答辩完成了,想回头看看之前没做过的2PL。
实现2PL有4种方式:
- 死锁检测。本篇是为了做这个而实现的,做这个事情的原因是c++标准库的shared_mutex无法从外界告知获取锁失败。
- 如果需要等待,那么马上结束txn。C++中有try_lock这样的方式,如果上锁失败就返回false,这样就可以实现这个了。
- 如果需要等待,那么杀死当前已经获得锁的一方。
- 在上锁前对资源排序。
2和4是最简单的,没什么好说的。3比1略容易一些。
基本思路
一个读写锁应该具有以下特征:
- 多个读者可以同时访问
- 写者独占访问
- 写者与读者互斥
- 避免写者饥饿或读者饥饿
- 锁的递归使用
由于实现的锁不能够出现读饿死、写饿死的现象,所以我想到一个很简单的方法:先到先得。当然也许会有其他方案。
先到先得的方式下,如何判断一个线程是否该阻塞?
- 第一个写请求之前的所有读请求可以进行
- 如果第一个请求是写请求,那么只有这一个写请求可以进行
- 如果没有写请求,那么所有读都可以进行
- 如果没有读请求,那么第一个写请求可以进行。这实际是2的特殊情况
- 其他请求都不可以进行
我们画图来说明一下。
假定某一刻有这些请求被阻塞,现在考虑挑出来可以执行的线程来执行
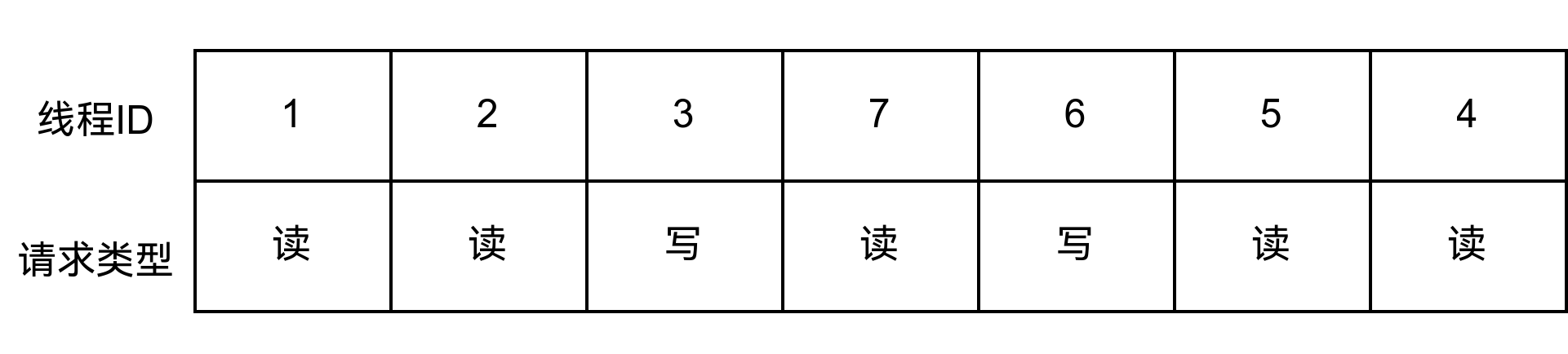
队列中,第一个写请求之前的读都可以进行,所以此时1,2线程是可以执行的。它们读完后释放锁,于是在这个队列中删除了1,2
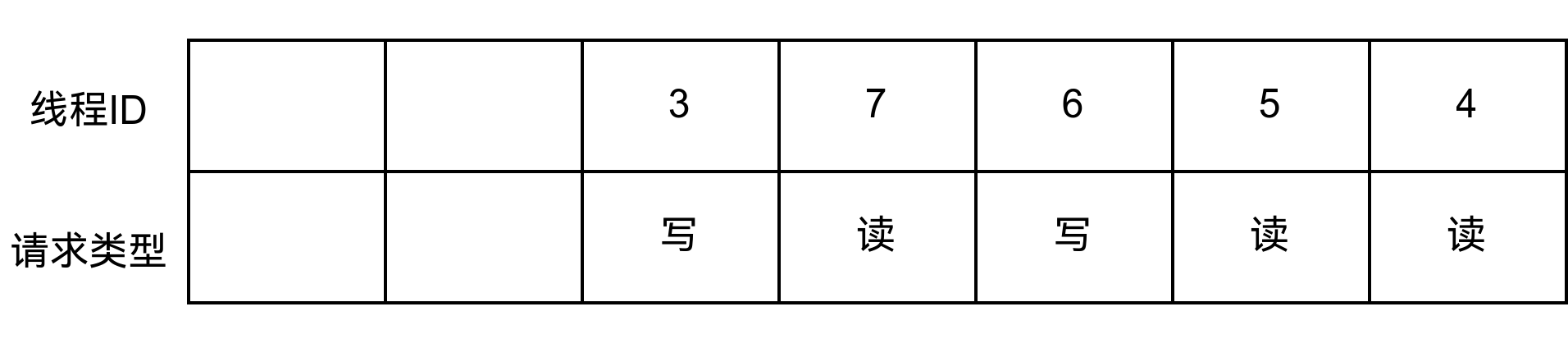
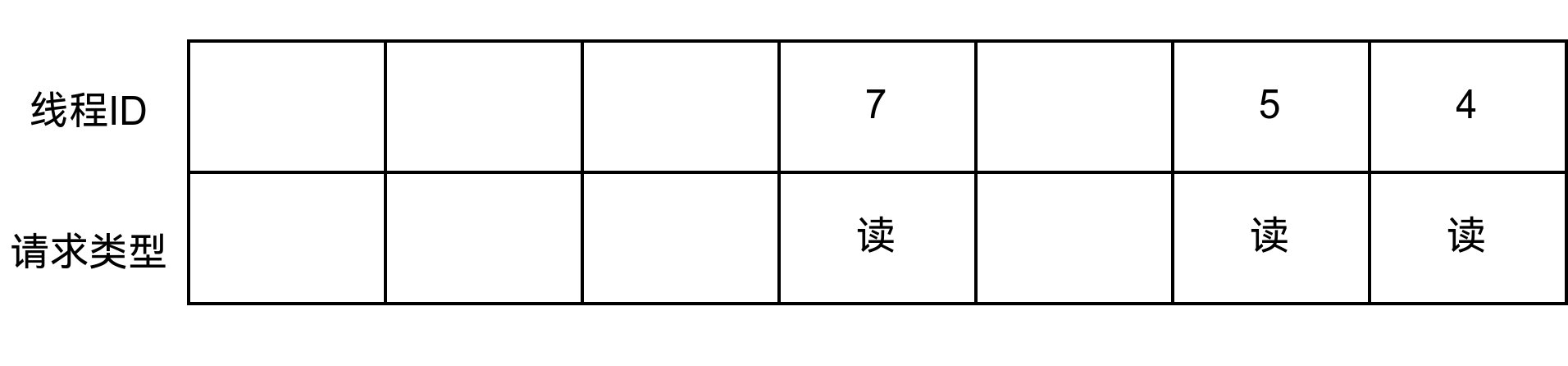
1,2删除后,3可以正常执行。6在环检测的时候被要求结束,然后线程3也结束了,所以此时所有的读都可以进行。
实现先到先得,可以通过记录正在进行读的线程数量,正在进行写的线程数量,请求写但是被阻塞的线程数量,请求读但是被阻塞的线程数量,然后根据条件来分配资源给某个线程......维护的信息数量可能不止这些,比如说需要维护哪些线程的读被阻塞了。
而环检测的2PL,我们需要在外界通知线程锁获取失败,所以选择了使用队列来实现,这个队列需要支持:
- 添加读者、写者(AddReader, AddWriter)
- 删除读者、写者(RemoveReader, RemoveWriter,为了简化,统一为一个Remove了)
- 当可以获得锁的时候,提醒可以获得锁的线程。这个可以用condition_variable实现
- 确定某个线程是否应该阻塞
然而做这样一个队列还是需要费一些功夫的。
队列实现
明确了功能需求后,考虑一下需要什么样的数据结构。普通的队列肯定是不够的,毕竟我们会删除其中任意一个元素,容易想到的是map/set。然后考虑到先到先得的顺序要求,可以考虑额外记录一个逻辑时间timestamp,每当一个请求到达,就递增timestamp。由于加入了timestamp,所以为了支持删除,至少需要tid:timestamp的映射。而为了支持按timestamp查询,至少需要timestamp:tid的映射。此外,需要记录一个请求是读还是写,所以一共需要tid:timestamp的映射和timestamp:<tid,读写标记>的映射。
timestamp:<tid,读写标记>映射关系,很容易想到通过std::map这种天然自带排序的数据结构来实现,即:
- 从最小到最大遍历开头的读请求,这部分线程可以直接执行。
- 如果是写请求开头的,那么这个写可以直接执行。
- 解锁的时候删除该线程的记录。
笔者在此前做了CMU15445,里面的GC的watermark和这个非常显相似。CMU15445中作者提到了可以使用unordered_map来将时间复杂度从O(logn)优化到O(1),这种做法我想到了,所以这里的队列使用的都是unordered_map。
c++
#pragma once
#ifndef READER_WRITER_QUEUE_H
#define READER_WRITER_QUEUE_H
// INSPIRED BY CMU15445 fall2023 watermark
#include <cassert>
#include <unordered_map>
class ReaderWriterQueue {
public:
void AddReader(int tid) {
assert(tid_ts.count(tid) == 0);
ts_tt[next_timestamp] = {tid, TidType::kRead};
tid_ts[tid] = next_timestamp;
next_timestamp++;
}
void AddWriter(int tid) {
assert(tid_ts.count(tid) == 0);
ts_tt[next_timestamp] = {tid, TidType::kWrite};
tid_ts[tid] = next_timestamp;
next_timestamp++;
}
void Remove(int tid) {
auto ts = tid_ts.find(tid);
if (ts == tid_ts.end()) return;
assert(ts_tt.count(ts->second) == 1);
ts_tt.erase(ts->second);
tid_ts.erase(ts);
}
bool ShallBlock(int tid) {
ResetMinWriteTimestamp();
ResetMinTimestamp(); // 这两个timestamp处理可以合并
auto iter = tid_ts.find(tid);
assert(iter != tid_ts.end());
assert(ts_tt.count(iter->second) == 1);
auto ts = iter->second;
auto [_, type] = ts_tt[ts];
// 如果读者之前有写者,那么就需要阻塞等待
if (type == TidType::kRead) return ts > min_write_ts;
// 如果写者之前有读者,那么就需要阻塞等待
if (min_ts < min_write_ts) return true;
// 如果写者之前有写者,那么就需要阻塞等待
return ts_tt[min_write_ts].tid != tid;
}
private:
void ResetMinWriteTimestamp() {
for (; min_write_ts < next_timestamp; min_write_ts++) {
auto iter = ts_tt.find(min_write_ts);
if (iter == ts_tt.end()) {
continue;
} else if (iter->second.type == TidType::kWrite) {
break;
} else { // iter->second.type == TidType::kRead
continue;
}
}
}
void ResetMinTimestamp() {
for (; min_ts < next_timestamp; min_ts++) {
auto iter = ts_tt.find(min_ts);
if (iter != ts_tt.end())
break;
}
}
long next_timestamp = 0;
long min_write_ts = 0;
long min_ts = 0;
struct TidType {
int tid;
enum LockType {kRead, kWrite} type;
bool operator==(const TidType &rhs) const {
return tid == rhs.tid && type == rhs.type;
}
};
std::unordered_map<long, TidType> ts_tt;
std::unordered_map<int, long> tid_ts;
};
#endif // READER_WRITER_QUEUE_H将队列封装为读写锁
这一步封装已经非常容易了,一个请求到来,添加到队列中。如果需要阻塞,那么就通过condition_variable等待通知。解锁的时候,不仅仅需要在队列中进行移除,还需要notify_all。notify_all还可以优化,但是这不是那么容易的事情了,不考虑。
c++
#pragma once
#ifndef SIMPLE_SHARED_MUTEX_H
#define SIMPLE_SHARED_MUTEX_H
#include <condition_variable>
#include <ctime>
#include <cstdio>
#include <mutex>
#include <unistd.h>
#include "reader_writer_queue.h"
class SimpleSharedMutex {
public:
void lock() {
std::unique_lock lock{mtx};
auto tid = ::gettid();
queue.AddWriter(tid);
while (queue.ShallBlock(tid)) cv.wait(lock);
// printf("lock %d\n", tid);
}
void shared_lock() {
std::unique_lock lock{mtx};
auto tid = ::gettid();
queue.AddReader(tid);
while (queue.ShallBlock(tid)) cv.wait(lock);
// printf("slock %d\n", tid);
}
void unlock() {
std::unique_lock lock{mtx};
queue.Remove(::gettid());
cv.notify_all();
// printf("ulock %d\n", ::gettid());
}
void shared_unlock() {
std::unique_lock lock{mtx};
queue.Remove(::gettid());
cv.notify_all();
// printf("uslock %d\n", ::gettid());
}
private:
std::mutex mtx;
ReaderWriterQueue queue;
std::condition_variable cv;
};
#endif // SIMPLE_SHARED_MUTEX_H