第一步: Depth Anything V2介绍
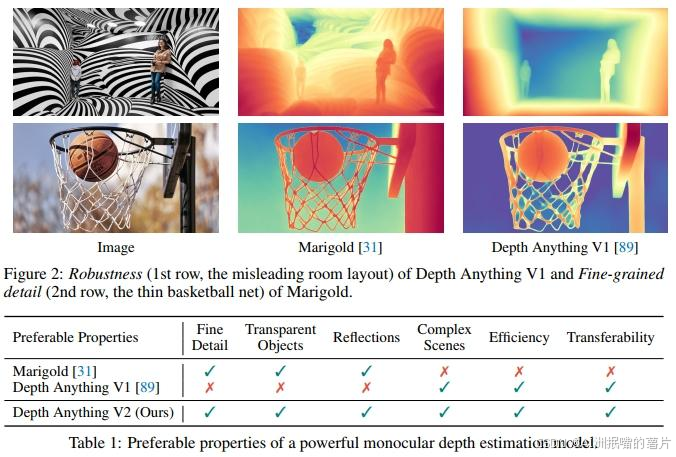
本文介绍了 Depth Anything V2。在不追求复杂技术的前提下,我们旨在揭示一些关键发现,为构建强大的单目深度估计模型铺平道路。与 V1 89 相比,本版本通过三项关键实践产生了更精细且更鲁棒的深度预测:1)用合成图像替代所有标注的真实图像;2)扩大教师模型的容量;3)通过大规模伪标签真实图像的桥梁来训练学生模型。与基于稳定扩散(Stable Diffusion)构建的最新模型 31 相比,我们的模型在效率上显著更高(速度提升超过 10 倍),且更为准确。我们提供了不同规模的模型(参数量从 2500 万到 13 亿不等),以支持广泛的应用场景。得益于其强大的泛化能力,我们对其进行了度量深度标签的微调,以获得我们的度量深度模型。除了我们的模型外,考虑到当前测试集的多样性有限且常常存在噪声,我们构建了一个多功能评估基准,具有精确的标注和多样的场景,以促进未来的研究。
第二步:Depth Anything V2模型框架
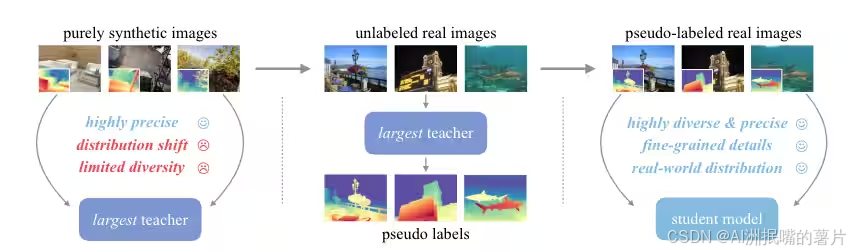
训练 Depth Anything V2 的模型流程包括三个主要步骤:
- 在高质量合成图像上训练基于 DINOv2-G 编码器的教师模型。
- 在大规模未标记的真实图像上生成准确的伪深度。
- 在伪标记的真实图像上训练最终的学生模型,以实现稳健的泛化。
以下是 Depth Anything V2 训练过程的更简单说明:
第三步:模型代码展示
python
import cv2
import torch
import torch.nn as nn
import torch.nn.functional as F
from torchvision.transforms import Compose
from .dinov2 import DINOv2
from .util.blocks import FeatureFusionBlock, _make_scratch
from .util.transform import Resize, NormalizeImage, PrepareForNet
def _make_fusion_block(features, use_bn, size=None):
return FeatureFusionBlock(
features,
nn.ReLU(False),
deconv=False,
bn=use_bn,
expand=False,
align_corners=True,
size=size,
)
class ConvBlock(nn.Module):
def __init__(self, in_feature, out_feature):
super().__init__()
self.conv_block = nn.Sequential(
nn.Conv2d(in_feature, out_feature, kernel_size=3, stride=1, padding=1),
nn.BatchNorm2d(out_feature),
nn.ReLU(True)
)
def forward(self, x):
return self.conv_block(x)
class DPTHead(nn.Module):
def __init__(
self,
in_channels,
features=256,
use_bn=False,
out_channels=[256, 512, 1024, 1024],
use_clstoken=False
):
super(DPTHead, self).__init__()
self.use_clstoken = use_clstoken
self.projects = nn.ModuleList([
nn.Conv2d(
in_channels=in_channels,
out_channels=out_channel,
kernel_size=1,
stride=1,
padding=0,
) for out_channel in out_channels
])
self.resize_layers = nn.ModuleList([
nn.ConvTranspose2d(
in_channels=out_channels[0],
out_channels=out_channels[0],
kernel_size=4,
stride=4,
padding=0),
nn.ConvTranspose2d(
in_channels=out_channels[1],
out_channels=out_channels[1],
kernel_size=2,
stride=2,
padding=0),
nn.Identity(),
nn.Conv2d(
in_channels=out_channels[3],
out_channels=out_channels[3],
kernel_size=3,
stride=2,
padding=1)
])
if use_clstoken:
self.readout_projects = nn.ModuleList()
for _ in range(len(self.projects)):
self.readout_projects.append(
nn.Sequential(
nn.Linear(2 * in_channels, in_channels),
nn.GELU()))
self.scratch = _make_scratch(
out_channels,
features,
groups=1,
expand=False,
)
self.scratch.stem_transpose = None
self.scratch.refinenet1 = _make_fusion_block(features, use_bn)
self.scratch.refinenet2 = _make_fusion_block(features, use_bn)
self.scratch.refinenet3 = _make_fusion_block(features, use_bn)
self.scratch.refinenet4 = _make_fusion_block(features, use_bn)
head_features_1 = features
head_features_2 = 32
self.scratch.output_conv1 = nn.Conv2d(head_features_1, head_features_1 // 2, kernel_size=3, stride=1, padding=1)
self.scratch.output_conv2 = nn.Sequential(
nn.Conv2d(head_features_1 // 2, head_features_2, kernel_size=3, stride=1, padding=1),
nn.ReLU(True),
nn.Conv2d(head_features_2, 1, kernel_size=1, stride=1, padding=0),
nn.ReLU(True),
nn.Identity(),
)
def forward(self, out_features, patch_h, patch_w):
out = []
for i, x in enumerate(out_features):
if self.use_clstoken:
x, cls_token = x[0], x[1]
readout = cls_token.unsqueeze(1).expand_as(x)
x = self.readout_projects[i](torch.cat((x, readout), -1))
else:
x = x[0]
x = x.permute(0, 2, 1).reshape((x.shape[0], x.shape[-1], patch_h, patch_w))
x = self.projects[i](x)
x = self.resize_layers[i](x)
out.append(x)
layer_1, layer_2, layer_3, layer_4 = out
layer_1_rn = self.scratch.layer1_rn(layer_1)
layer_2_rn = self.scratch.layer2_rn(layer_2)
layer_3_rn = self.scratch.layer3_rn(layer_3)
layer_4_rn = self.scratch.layer4_rn(layer_4)
path_4 = self.scratch.refinenet4(layer_4_rn, size=layer_3_rn.shape[2:])
path_3 = self.scratch.refinenet3(path_4, layer_3_rn, size=layer_2_rn.shape[2:])
path_2 = self.scratch.refinenet2(path_3, layer_2_rn, size=layer_1_rn.shape[2:])
path_1 = self.scratch.refinenet1(path_2, layer_1_rn)
out = self.scratch.output_conv1(path_1)
out = F.interpolate(out, (int(patch_h * 14), int(patch_w * 14)), mode="bilinear", align_corners=True)
out = self.scratch.output_conv2(out)
return out
class DepthAnythingV2(nn.Module):
def __init__(
self,
encoder='vitl',
features=256,
out_channels=[256, 512, 1024, 1024],
use_bn=False,
use_clstoken=False
):
super(DepthAnythingV2, self).__init__()
self.intermediate_layer_idx = {
'vits': [2, 5, 8, 11],
'vitb': [2, 5, 8, 11],
'vitl': [4, 11, 17, 23],
'vitg': [9, 19, 29, 39]
}
self.encoder = encoder
self.pretrained = DINOv2(model_name=encoder)
self.depth_head = DPTHead(self.pretrained.embed_dim, features, use_bn, out_channels=out_channels, use_clstoken=use_clstoken)
def forward(self, x):
patch_h, patch_w = x.shape[-2] // 14, x.shape[-1] // 14
features = self.pretrained.get_intermediate_layers(x, self.intermediate_layer_idx[self.encoder], return_class_token=True)
depth = self.depth_head(features, patch_h, patch_w)
depth = F.relu(depth)
return depth.squeeze(1)
@torch.no_grad()
def infer_image(self, raw_image, input_size=518):
image, (h, w) = self.image2tensor(raw_image, input_size)
depth = self.forward(image)
depth = F.interpolate(depth[:, None], (h, w), mode="bilinear", align_corners=True)[0, 0]
return depth.cpu().numpy()
def image2tensor(self, raw_image, input_size=518):
transform = Compose([
Resize(
width=input_size,
height=input_size,
resize_target=False,
keep_aspect_ratio=True,
ensure_multiple_of=14,
resize_method='lower_bound',
image_interpolation_method=cv2.INTER_CUBIC,
),
NormalizeImage(mean=[0.485, 0.456, 0.406], std=[0.229, 0.224, 0.225]),
PrepareForNet(),
])
h, w = raw_image.shape[:2]
image = cv2.cvtColor(raw_image, cv2.COLOR_BGR2RGB) / 255.0
image = transform({'image': image})['image']
image = torch.from_numpy(image).unsqueeze(0)
DEVICE = 'cuda' if torch.cuda.is_available() else 'mps' if torch.backends.mps.is_available() else 'cpu'
image = image.to(DEVICE)
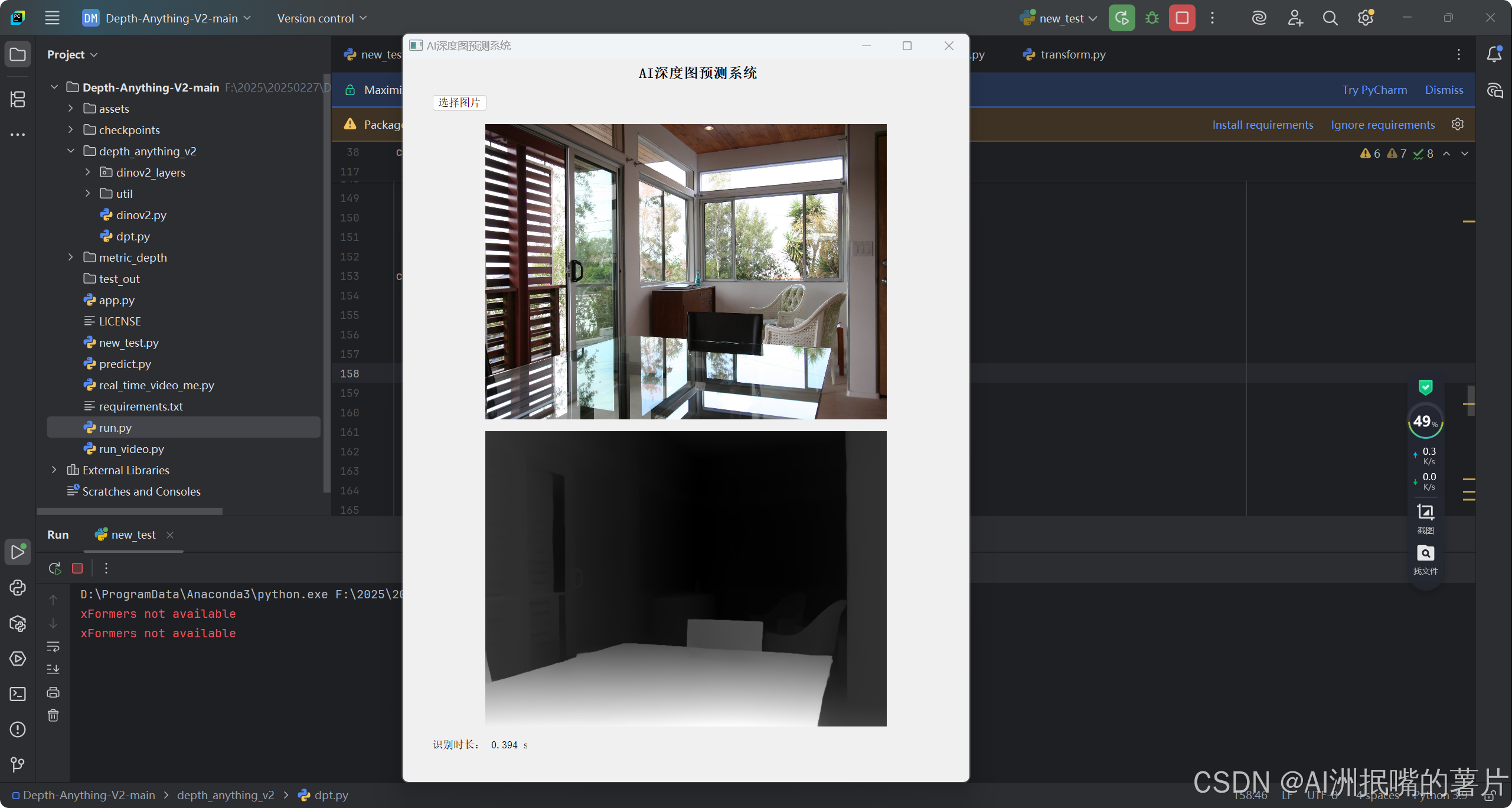
return image, (h, w)第四步:运行交互代码
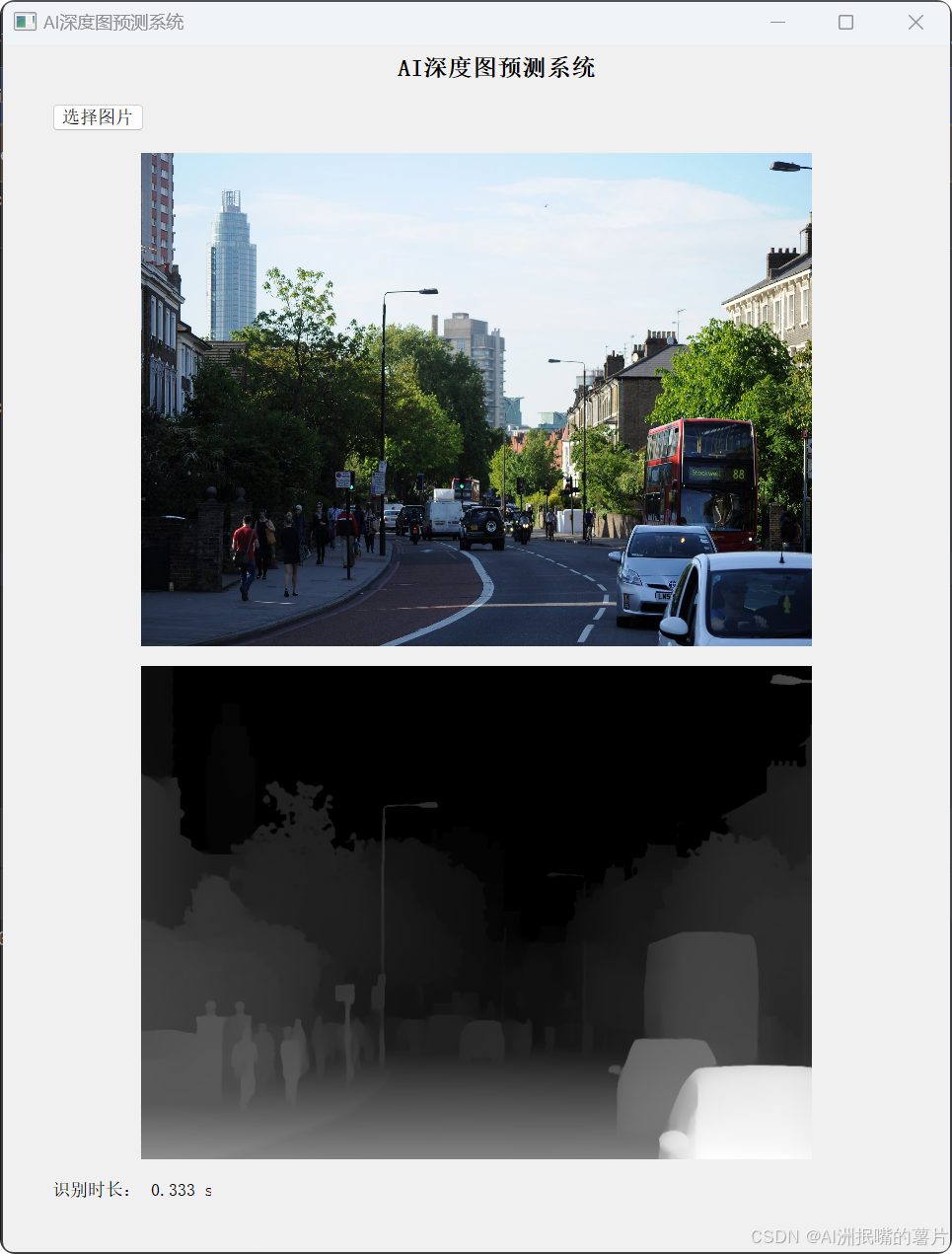
第五步:整个工程的内容
项目完整文件下载请见演示与介绍视频的简介处给出:➷➷➷
深度学习Depth Anything V2神经网络实现单目深度估计系统源码_哔哩哔哩_bilibili