ZipMPC:让短视的MPC拥有长远眼光------通过模仿学习压缩长 horizon 智慧
论文标题:ZipMPC: Compressed Context-Dependent MPC Cost via Imitation Learning
arXiv:2507.13088 pdf, ps, other cs.RO eess.SY
ZipMPC: Compressed Context-Dependent MPC Cost via Imitation Learning
Authors: Rahel Rickenbach, Alan A. Lahoud, Erik Schaffernicht, Melanie N. Zeilinger, Johannes A. Stork
一段话总结
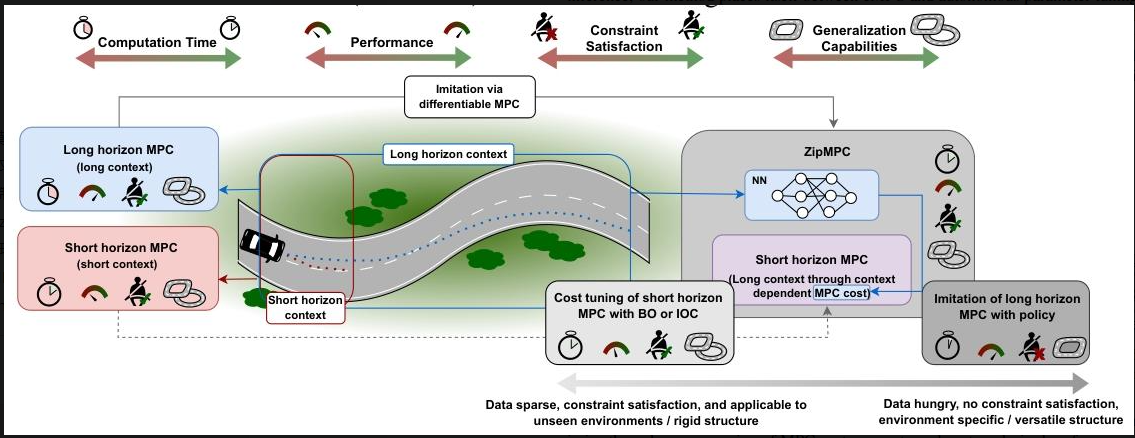
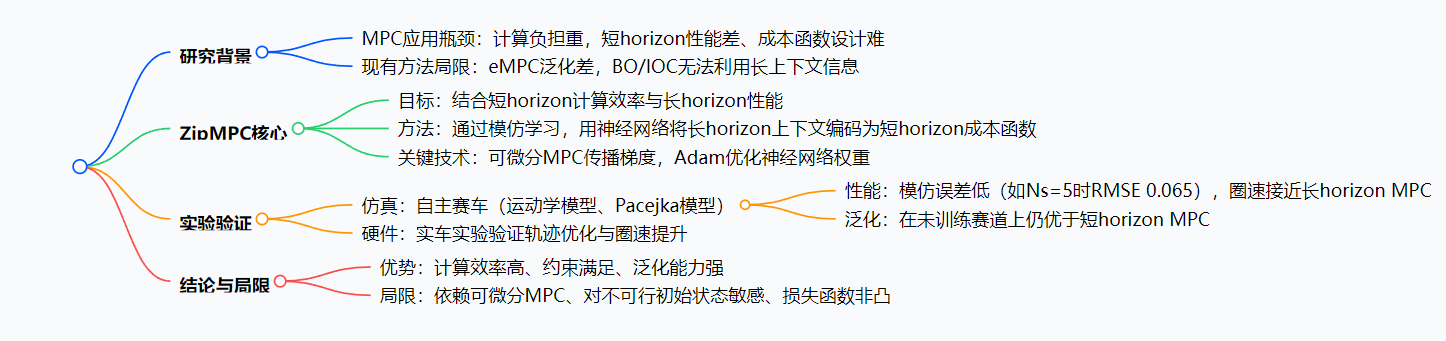
ZipMPC 是一种通过模仿学习实现长预测 horizon 模型预测控制(MPC)行为的方法,其核心是为短 horizon MPC 学习一个压缩的、上下文相关的成本函数,以解决传统MPC在实时系统(如机器人)中因计算负担重而限制应用的问题。该方法利用可微分MPC和神经网络传播模仿损失的梯度,兼具短 horizon MPC的计算效率、长 horizon MPC的长期目标优化能力、约束满足性及对未训练环境的泛化能力。在自主赛车的仿真和实车实验中,ZipMPC的圈速接近长 horizon MPC,且优于短 horizon MPC和其他基线方法(如eMPC、BO),甚至能完成短 horizon MPC无法完成的赛道任务。
研究背景:MPC的"短视"困境与行业痛点
想象一下,当一辆自动驾驶赛车飞驰在赛道上时,它需要每秒多次决策下一步的转向和加速。如果它只看眼前10米的路况(短预测范围,即短horizon),很可能在即将到来的急弯前减速过晚,甚至冲出赛道;但如果它能看到前方100米的全部弯道(长horizon),就能提前规划最优路线,跑得又快又稳。
这正是模型预测控制(MPC)在实际应用中面临的核心矛盾:长horizon MPC能优化长期目标,性能更优,但计算量太大,无法满足实时性要求;短horizon MPC计算快,却因"目光短浅"导致性能差,且成本函数设计难度极高。
在机器人、自动驾驶等领域,这个矛盾尤为突出。比如自主赛车,短horizon MPC可能因无法预判弯道而频繁急刹,长horizon MPC虽能平滑过弯,却因计算太慢跟不上实时控制需求。现有解决方案也各有缺陷:近似显式MPC(eMPC)计算快但泛化差,换个赛道就"失灵";贝叶斯优化(BO)或逆最优控制(IOC)调参无法利用长horizon的上下文信息,填不上"信息缺口"。
行业迫切需要一种方法:既能像短horizon MPC一样"反应迅速",又能像长horizon MPC一样"高瞻远瞩"。
主要作者及单位
该研究由来自瑞士苏黎世联邦理工学院(ETH Zurich)和瑞典厄勒布鲁大学(Örebro University)的团队合作完成,核心作者包括Rahel Rickenbach、Alan A. Lahoud、Melanie N. Zeilinger等。相关代码和视频可在zipmpc.github.io/查看。
创新点:用"模仿学习"给短horizon MPC装"长焦镜头"
ZipMPC的核心创新在于:让短horizon MPC通过模仿长horizon MPC的行为,学会利用长horizon的上下文信息,同时保持自身计算效率。具体来说,它通过三个关键设计打破传统局限:
- 压缩长horizon信息:用神经网络将长horizon的上下文(如赛道曲率序列)编码成短horizon MPC的成本函数参数,相当于给短horizon MPC装上"记忆",让它"记住"远方的路况。
- 可微分MPC传梯度:借助可微分MPC技术,将"模仿损失"(短horizon与长horizon轨迹的差距)的梯度穿过MPC优化过程,精准更新神经网络,确保学到的成本函数真能模仿长horizon的决策。
- 兼顾灵活性与约束:不直接学控制策略(如行为克隆),而是学成本函数,既保证了对新环境的泛化能力,又能通过MPC本身的优化过程满足系统约束(如赛车不冲出赛道)。
简单说,ZipMPC就像一个"聪明的实习生":通过观察"资深专家"(长horizon MPC)的决策逻辑,把复杂经验浓缩成简单规则(成本函数),自己干活(短horizon MPC)时又快又好。
研究方法:从模仿到落地的完整路径
ZipMPC的实现逻辑可以拆解为四个核心步骤,从目标定义到实验验证环环相扣:
步骤1:明确"模仿目标"
定义长horizon MPC(NLN_LNL)为"老师",其优化结果(轨迹和控制输入)作为模仿目标;短horizon MPC(NSN_SNS,NS<NLN_S < N_LNS<NL)为"学生",目标是通过学习成本函数,让自己的轨迹尽可能接近老师。
步骤2:设计"模仿工具"
- 用神经网络(参数θ\thetaθ)构建函数hθh^\thetahθ,输入当前状态(如赛车位置、速度)和长horizon上下文(如未来赛道曲率),输出短horizon MPC的成本参数CNSθC_{N_S}^\thetaCNSθ。
- 为了让学习更高效,以人工设计的短horizon成本参数为"起点",神经网络只输出修正值,最终成本参数为"起点+修正值"。
步骤3:优化"模仿效果"
- 用均方误差(MSE)计算短horizon与长horizon轨迹的"模仿损失",重点关注前NDN_DND步(ND≤NSN_D \leq N_SND≤NS),因为MPC实际只执行第一步控制输入。
- 用Adam优化器更新神经网络参数,通过可微分MPC确保梯度能从损失反向传播到网络权重,避免"学歪"。
步骤4:实验验证
在自主赛车场景中测试:
- 仿真:用运动学模型(简单)和Pacejka模型(复杂,考虑轮胎力学)对比ZipMPC与短horizon MPC、eMPC、BO等基线的模仿误差、圈速和计算时间。
- 硬件:在微型赛车平台上验证,不重新训练直接部署仿真中得到的模型,测试实际赛道表现。
核心成果:性能、效率与泛化的全面突破
ZipMPC在仿真和硬件实验中均展现出显著优势,完美解决了传统方法的痛点:
1. 性能逼近长horizon,效率看齐短horizon
- 在自主赛车仿真中,当NS=5N_S=5NS=5、NL=18N_L=18NL=18时,ZipMPC的轨迹模仿误差(RMSE)仅0.065,远低于短horizon MPC(0.194)和BO(0.089)。
- 圈速上,ZipMPC接近长horizon MPC(如运动学模型中,长horizon圈速8.358s,ZipMPC 8.436s),但计算时间仅为长horizon的17.5%~29%。
2. 能完成"不可能的任务"
在Pacejka模型中,短horizon MPC(NS=6N_S=6NS=6)因"短视"无法完成赛道,而ZipMPC(NS=6N_S=6NS=6)借助长horizon上下文信息,不仅能完成,还能将圈速控制在13.83s左右。
3. 泛化能力强,新赛道也能跑
在未训练的赛道(更长、曲率更复杂)上,ZipMPC的圈速仍显著低于短horizon MPC。例如运动学模型中,测试赛道1的短horizon圈速6.891s,ZipMPC为6.312s,接近长horizon的6.273s。
4. 硬件落地验证
在微型赛车实验中,ZipMPC的轨迹更平滑(减少急刹急转),圈速比短horizon MPC更优,甚至能在短horizon MPC"卡壳"的弯道中顺利通过。
思维导图
详细总结
1. 研究背景与挑战
- MPC的应用与局限:MPC在机器人、自主赛车等安全关键领域应用广泛,但为保证实时性常采用短预测 horizon,导致长期目标优化能力弱、成本函数设计困难。
- 现有方法的不足 :
- 近似显式MPC(eMPC):计算快但泛化差,难以满足约束;
- 成本参数调优(BO/IOC):无法利用长horizon上下文信息,难以弥补信息缺口。
2. ZipMPC的核心设计
- 核心思想:通过模仿学习,让短horizon MPC(Ns)学习长horizon MPC(NL,NL>Ns)的行为,具体是用神经网络学习一个依赖状态和长horizon上下文(如赛道曲率)的成本函数,压缩长horizon信息到短horizon中。
- 学习框架 :
- 输入:当前状态x(k)和长horizon上下文Zk,NL(如赛道曲率序列);
- 输出:短horizon成本参数CNsθ,通过神经网络hθ计算(CNs^θ = h^θ(x(k), Zk,NL));
- 优化目标:最小化短horizon轨迹与长horizon轨迹的模仿损失(如MSE)。
- 梯度传播:利用可微分MPC技术(如基于KKT条件的iLQR近似),将损失梯度通过MPC优化过程传播到神经网络参数,实现端到端训练。
3. 实验结果
| 实验指标 | 关键结果(以自主赛车为例) |
|---|---|
| 模仿误差 | ZipMPC的RMSE显著低于BO、eMPC和短horizon MPC,如Ns=5、NL=18时,ZipMPC为0.065±0.006,BO为0.089±0.009 |
| 圈速性能 | 接近长horizon MPC,优于其他方法。如运动学模型中,Ns=5、NL=18时,ZipMPC圈速8.436s,短horizon MPC为9.103s |
| 计算效率 | 优化时间较长期MPC减少82.5%~87.9%(Pacejka模型,Ns=6、NL=35/45时) |
| 泛化能力 | 在未训练赛道(更长/更短、曲率不同)上,圈速仍低于短horizon MPC,如运动学模型中测试赛道1的圈速6.312s vs 6.891s |
| 约束满足 | 能完成短horizon MPC无法完成的赛道(如Pacejka模型中Ns=6时,短horizon MPC失败,ZipMPC成功) |
4. 结论与局限性
- 结论:ZipMPC结合了eMPC的计算效率、BO/IOC的约束满足与泛化能力,在自主赛车任务中验证了其优越性。
- 局限性:依赖可微分MPC的性能、对不可行初始状态敏感、模仿损失非凸可能导致局部最优。
4. 关键问题
-
ZipMPC如何实现短horizon MPC对长horizon MPC的模仿?
答:ZipMPC通过神经网络(参数θ)将长horizon上下文信息(如赛道曲率序列Zk,NL)和当前状态x(k)编码为短horizon MPC的成本参数CNs^θ,再利用可微分MPC技术传播模仿损失(短horizon与长horizon轨迹的MSE)的梯度,优化神经网络权重,使短horizon MPC的行为接近长horizon MPC。
-
与短horizon MPC、eMPC等基线方法相比,ZipMPC的核心优势是什么?
答:相比短horizon MPC,ZipMPC通过引入长horizon上下文信息,优化了长期目标,提升了圈速并能完成其无法完成的任务;相比eMPC,ZipMPC保留了约束满足性且泛化能力更强(能适应未训练环境);同时保持与短horizon MPC相当的计算效率。
-
实验中ZipMPC在自主赛车上的性能提升具体体现在哪些方面?
答:① 圈速更接近长horizon MPC(如运动学模型中,ZipMPC圈速8.436s vs 长horizon 8.358s);② 计算时间显著减少(如Pacejka模型中减少82.5%~87.9%);③ 在未训练赛道上仍保持优势(如测试赛道圈速降低约8%);④ 能完成短horizon MPC和eMPC无法完成的赛道。
总结:从"鱼和熊掌"到"两全其美"
ZipMPC的核心价值,在于打破了MPC中"计算效率"与"控制性能"的对立:它用模仿学习压缩长horizon的智慧,用可微分MPC保证学习精度,最终让短horizon MPC既能"跑得快"(计算快),又能"看得远"(性能优)。
对于自主赛车、机器人等实时系统,这意味着更低的硬件成本(无需高性能计算单元)和更高的任务可靠性(适应新环境、满足约束)。未来随着可微分MPC技术的进步,其在更复杂场景(如多机器人协作)中的潜力将进一步释放。