需求:
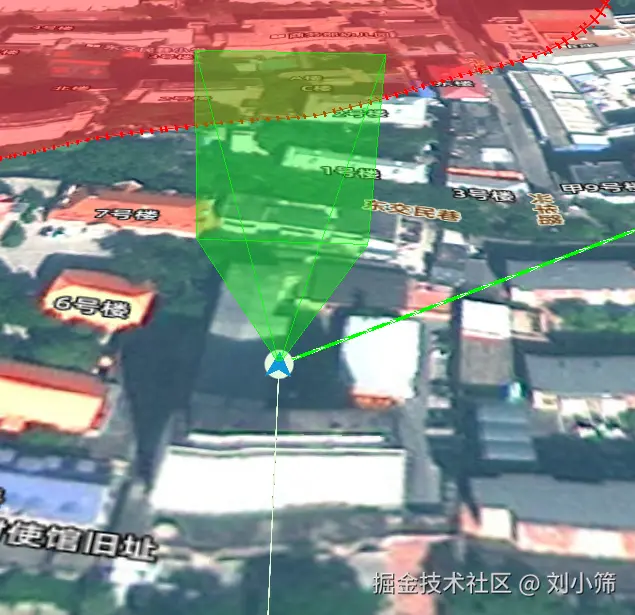
使用大疆无人机,需要在航线规划时显示飞机的朝向和相机视角,也就是我们说的航向角和视锥。
数据来源:
大疆无人机,通过SDK获取飞机的朝向和相机视角。
实现:
- 使用大疆无人机SDK获取飞机的朝向和相机视角。
- 使用Cesium显示飞机的朝向和相机视角。
代码如下:
- 通用方法
/**
* 根据大疆相机镜头参数 计算出cesium 的fov
* @param focalLength 焦距
* @param zoomFactor 变焦倍速
* @param sensorHeight 传感器高度
* @param distortionFactor 广角镜头需应用桶形畸变校正
* @param pixelPitch 高分辨率传感器需考虑像素密度
* @returns
*/
export function getCesiumFovFromCameraSpecifications(focalLength = 6.7, zoomFactor, sensorHeight = 24, distortionFactor = 1, pixelPitch = 0) {
const effectiveFocalLength = focalLength * zoomFactor;
const commonVerticalFOV = 2 * Math.atan(sensorHeight / (2 * effectiveFocalLength));
const wideAngleLensVerticalFOV = commonVerticalFOV * distortionFactor;
const highResolutionVerticalFOV = wideAngleLensVerticalFOV * (1 - pixelPitch / 1000);
return cesiumMath.toDegrees(highResolutionVerticalFOV).toFixed(2);
}
// 将大疆角度转换为Cesium HeadingPitchRoll
export function convertDjiToCesiumAngles(yaw, pitch) {
// 角度转弧度
const radYaw = cesiumMath.toRadians(90 + yaw);
const radPitch = -cesiumMath.toRadians(pitch);
return new HeadingPitchRoll(radYaw, radPitch, 0);
}
// 将数据处理成可以直接使用的
function getCesiumHPRFromDjiSpecifications(position, yaw, pitch = 0, gimbalRoll = 0) {
const orientation = convertDjiToCesiumAngles(yaw, pitch);
const orientationHPR = Transforms.headingPitchRollQuaternion(position, orientation);
// 创建修正旋转:绕 Y 轴 (北) 旋转 -90度 (-π/2),将默认前向从 -Z(下) 转向 +Y(北)
const correctionQuaternion = Quaternion.fromAxisAngle(
Cartesian3.UNIT_Y, // Y轴 (北)
-cesiumMath.PI_OVER_TWO // -90 degrees
);
//组合旋转:先应用修正旋转,再应用 HPR 旋转
//顺序很重要!我们想要:修正方向 -> 然后应用 HPR
//在四元数乘法中,顺序是反的: q_total = q_hpr * q_correction
return Quaternion.multiply(orientationHPR, correctionQuaternion, new Quaternion());
}- 封装航向角和视锥的类
/**
* 绘制无人机箭头【带方向】
*/
export class createDroneArrowEntity {
private viewer: any;
private _position: any;
private _yaw: any;
private _pitch: any;
private _roll: any;
private _droneArrowEntity: any;
constructor(viewer, options) {
this.viewer = viewer;
this.update(options);
}
update(options) {
this._position = options.position;
this._yaw = options.yaw;
this._pitch = options.pitch;
this._roll = -options.roll;
this._add();
}
_add() {
this.clear();
const cesiumHeading = cesiumMath.toRadians(this._yaw); // 0=正东
this._droneArrowEntity = this.viewer.entities.add({
position: this._position,
billboard: {
image: '/plane.png',
width: 30,
height: 30,
rotation: -cesiumHeading,
alignedAxis: Cartesian3.UNIT_Z,
scale: 1.0,
},
orientation: getCesiumHPRFromDjiSpecifications(this._position, this._yaw, this._pitch),
});
}
clear() {
if (this._droneArrowEntity) {
this.viewer.entities.remove(this._droneArrowEntity);
this._droneArrowEntity = null;
}
}
}
/**
* 绘制视锥
*/
export class CreateFrustum {
viewer;
_position;
_yaw: any;
_pitch: any;
_roll: any;
_fov: number;
_near: number;
_far: number;
_fill: boolean;
_closed: boolean;
_color: Color;
_outlineColor: Color;
_flat: boolean;
_frustum: any;
_frustumPrimitive: any;
_outlinePrimitive: any;
_aspectRatio: number;
constructor(viewer, options) {
this.viewer = viewer;
this._position = options.position;
this._yaw = options.yaw;
this._pitch = options.pitch;
this._roll = options.roll;
this._aspectRatio = options.aspectRatio || this.viewer.scene.canvas.clientHeight / this.viewer.scene.canvas.clientWidth;
this._fov = options.fov || 35.0;
this._near = options.near || 0.1;
this._far = options.far || 20;
this._fill = options.fill || false;
this._closed = options.closed || false;
this._color = options.color || new Color(0.0, 1.0, 0.0, 0.2);
this._outlineColor = options.outlineColor || new Color(0.0, 1.0, 0.0, 0.5);
this._flat = options.flat || true;
this.update(this._position, this._yaw, this._pitch, this._fov, this._far);
}
update(position, yaw, pitch, fov, far) {
this._position = position;
this._yaw = yaw;
this._pitch = pitch;
this._fov = fov;
this._far = far;
this._add();
}
_add() {
this.clear();
this._addFrustum();
this._addOutline();
}
clear() {
this._clearFrustum();
this._clearOutline();
}
_addFrustum() {
if (!defined(this._position)) {
return;
}
if (!defined(this.viewer)) {
return;
}
const frustum = new PerspectiveFrustum({
fov: cesiumMath.toRadians(this._fov),
aspectRatio: this._aspectRatio,
near: this._near,
far: this._far,
});
this._frustum = frustum;
const frustumGeometry = new FrustumGeometry({
frustum: frustum,
origin: this._position,
orientation: getCesiumHPRFromDjiSpecifications(this._position, this._yaw, this._pitch),
vertexFormat: VertexFormat.POSITION_ONLY,
});
const frustumGeometryInstance = new GeometryInstance({
geometry: frustumGeometry,
attributes: {
color: ColorGeometryInstanceAttribute.fromColor(this._color),
},
id: 'frustum',
});
this._frustumPrimitive = this.viewer.scene.primitives.add(
new Primitive({
geometryInstances: [frustumGeometryInstance],
appearance: new PerInstanceColorAppearance({
closed: this._closed,
flat: this._flat,
}),
asynchronous: false,
})
);
}
// 创建轮廓线
_addOutline() {
const frustum = new PerspectiveFrustum({
fov: cesiumMath.toRadians(this._fov),
// 视锥体的宽度/高度
aspectRatio: this._aspectRatio,
// 近面距视点的距离
near: this._near,
// 远面距视点的距离
far: this._far,
});
const geometry = new FrustumOutlineGeometry({
frustum: frustum,
origin: this._position,
orientation: getCesiumHPRFromDjiSpecifications(this._position, this._yaw, this._pitch),
});
const instance = new GeometryInstance({
geometry: geometry,
attributes: {
color: ColorGeometryInstanceAttribute.fromColor(this._outlineColor),
},
});
const primitive = new Primitive({
geometryInstances: [instance],
appearance: new PerInstanceColorAppearance({
closed: true,
flat: true,
}),
asynchronous: false,
});
this._outlinePrimitive = this.viewer.scene.primitives.add(primitive);
}
_clearFrustum() {
if (this._frustumPrimitive) {
this.viewer.scene.primitives.remove(this._frustumPrimitive);
this._frustumPrimitive = null;
}
}
// 清除轮廓线
_clearOutline() {
if (this._outlinePrimitive) {
this.viewer.scene.primitives.remove(this._outlinePrimitive);
this._outlinePrimitive = null;
}
}
}- 在业务代码中应用
import
const fov = getCesiumFovFromCameraSpecifications(6.7, focalLength);
DjiFrustum.value = new CreateFrustum(mainViewer, {
position: position,
yaw: heading,
pitch: pitch,
roll: 0,
fov,
near: 1,
far: far,
fill: true,
closed: true,
color: new Color(0.0, 1.0, 0.0, 0.2),
outlineColor: new Color(0.0, 1.0, 0.0, 0.5),
flat: true,
});
arrowEntity.value = new createDroneArrowEntity(mainViewer, {
position: position,
yaw: heading,
pitch: pitch,
roll: 0,
});效果展示
结语 :
按照上述步骤,将通用方法和类放在一个文件中(helper),然后在业务代码中正确使用,即可实现想要的效果。
如果对你有帮助,请点赞收藏欧,一路生花~~嘿嘿