项目简介:为分析炮弹发射 对炮膛 的时序影响 ,设计一种分布式应变测量 系统。系统由上位机、数据指令网关、采集节点三部分组成。
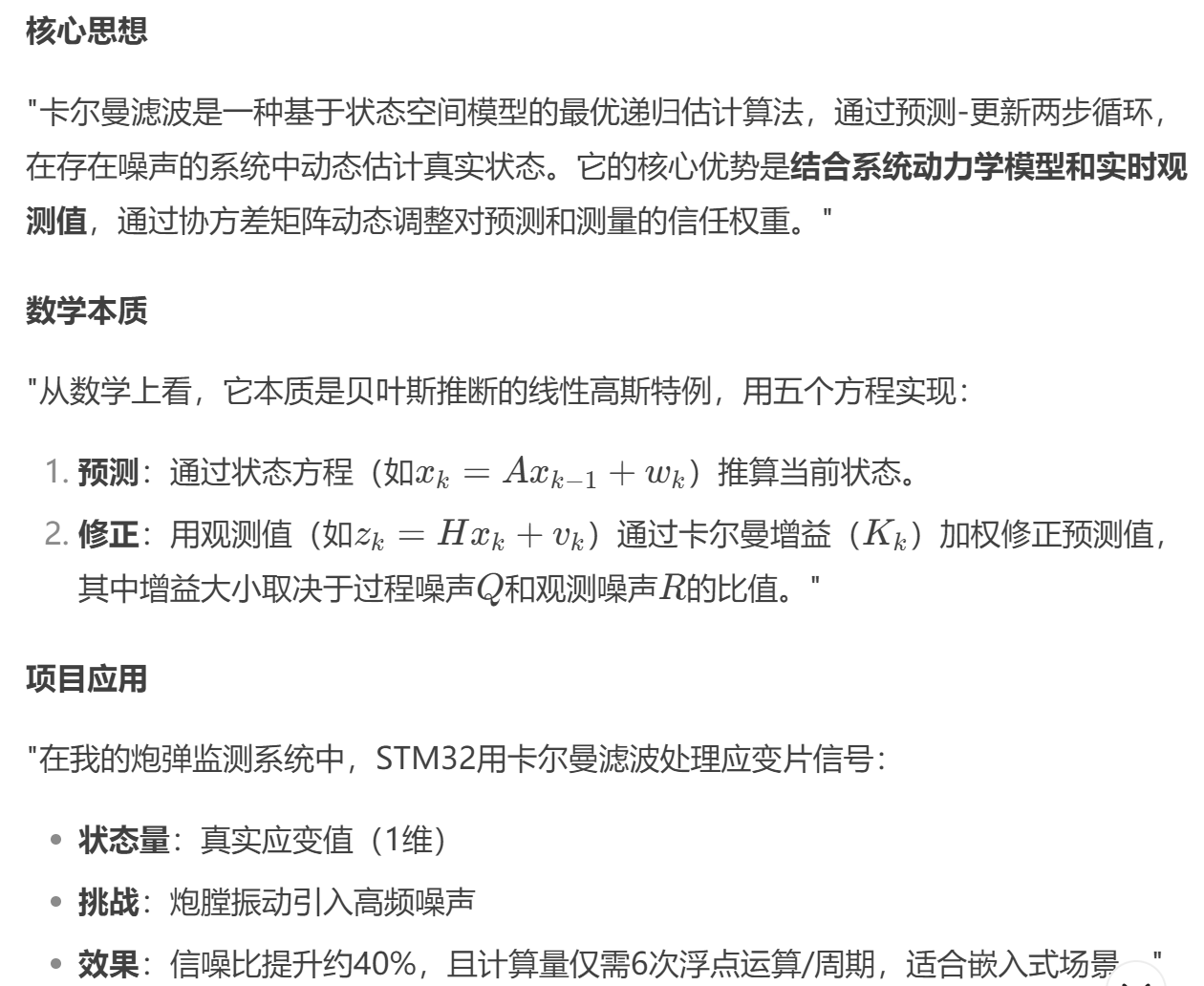
数据采集节点: 以STM32处理器 为核心,前端电桥 及信号调理电路 实现应变信号变换 ,利用外部中断 信号响应 来自网关节点 的时统信号 ,利用STM32处理器内置ADC DMA方式 实现应变数据采集 ,采用卡尔曼滤波 算法实现数据滤波,采用(nandflash 或者SD卡)实现数据临时存储 ,通过RS485总线 实现数据上传至网关节点。
网关节点: 采用基于imx6ull linux技术 实现,主要实现了RS485以太网 网关功能,能够接收 来自上位机 的指令 并转发至RS485,兼容TCP/UDP/MQTT协议;利用定时器 实现基于Linux的时统(时间统一系统)发生驱动,为采集节点提供同步信号;网关内置环控功能,通过板载温度传感器实现温度采集和散热控制;网关节点带有800*480屏幕实现传感器采集节点的轮询显示和校准控制功能;
上位机采用:NI软件实现数据读取分析显示功能。
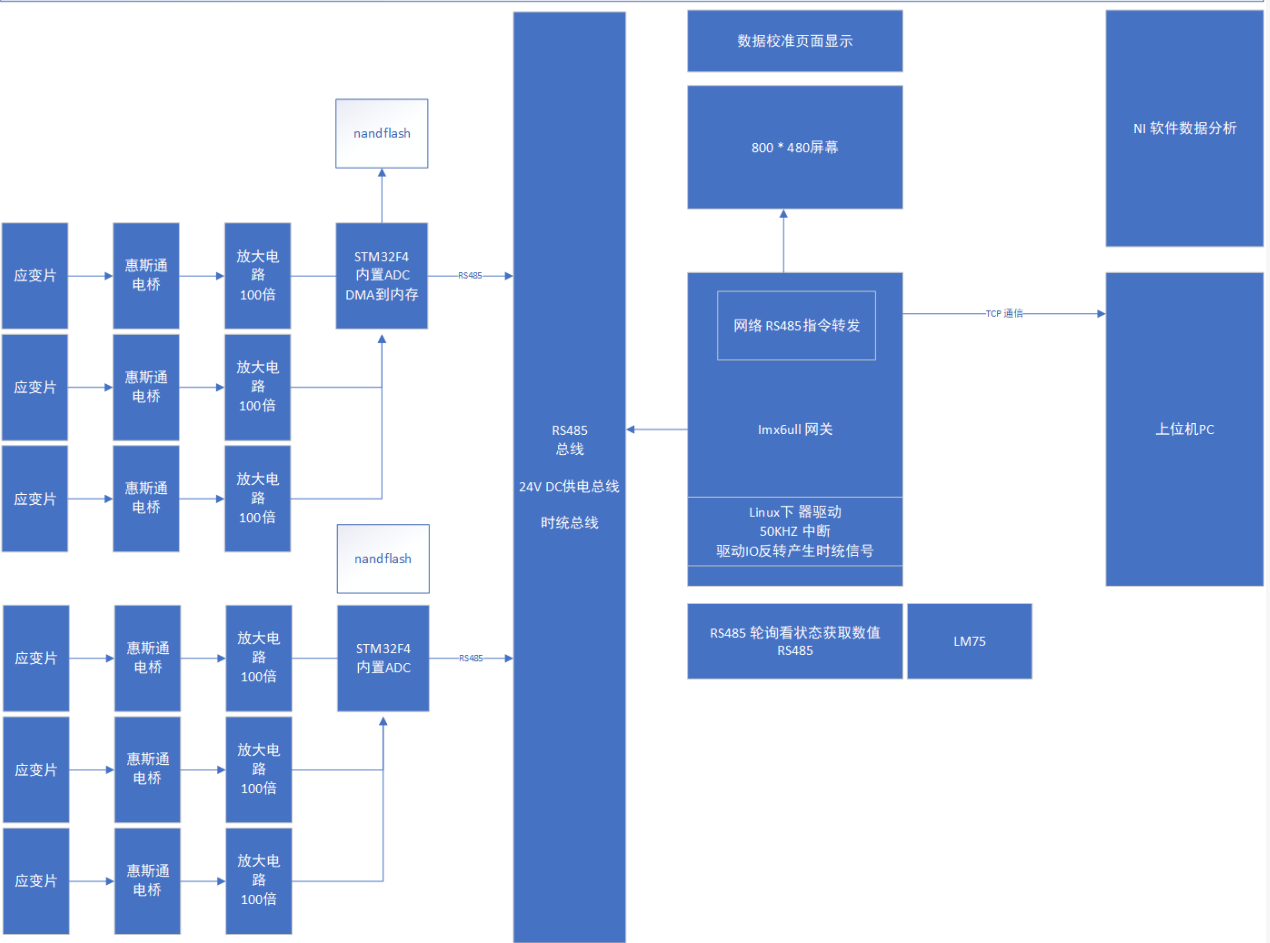
框图分析:
右半部分
网关(imx6ull)各模块功能解析
1. 屏幕显示模块(800×480)
-
功能:
-
显示 数据校准页面(如传感器零点调整、实时应变曲线)。
-
提供人机交互界面(HMI),支持触摸操作(如参数设置)。
-
-
技术实现:
-
Linux 驱动(如 Framebuffer 或 LVGL 图形库)。
-
通过 SPI 或 RGB 接口连接屏幕。
-
2. 网络通信模块
-
功能:
-
RS485 指令转发:接收上位机(PC/NI 软件)的指令,通过 RS485 转发至 STM32 节点。
-
TCP 通信:与上位机通过以太网交互(如上传数据、接收控制命令)。
-
-
协议支持:
-
下行(RS485):Modbus RTU(轮询 STM32)。
-
上行(TCP):MQTT/Modbus TCP(与 NI 软件通信)。
-
3. 电源模块(24V DC 供电总线)
-
功能:
-
为网关及附属电路(如 RS485 转换芯片)提供 24V 直流电源。
-
通过 DC-DC 降压芯片转换为 5V/3.3V 供 imx6ull 核心板使用。
-
-
设计要点:
- 多节点共享供电(总线结构),需考虑电源冗余和滤波。
4. 时统信号生成模块
-
功能:
-
通过 50kHz 硬件中断 精确控制 IO 口电平翻转,产生同步脉冲信号。
-
经 时统总线(RS485 或专用线路)广播至所有 STM32 节点,确保同步采集。
-
-
技术实现:
-
Linux 高精度定时器(如
hrtimer)或 FPGA 协处理。 -
驱动代码通过 GPIO 控制信号输出。
-
5. 数据采集与存储模块
-
RS485 轮询:
- 定时轮询各 STM32 节点的状态和应变数据(Modbus RTU 协议)。
-
数据缓存:
- 临时存储至 NAND Flash(防止网络中断丢失数据)。
6. 环境监测模块(LM75)
-
功能:
-
通过 I2C 接口读取板载温度(LM75 传感器)。
-
触发散热控制(如风扇调速)或过热报警。
-
7. 与上位机(NI 软件)的交互
-
数据流:
plaintext
复制
下载
STM32 → RS485 → 网关 → TCP/MQTT → NI 软件(分析/显示) -
指令流:
plaintext
复制
下载
NI 软件 → TCP → 网关 → RS485 → STM32(参数配置)
模块协同工作示意图
plaintext
复制
下载
+---------------------+
| imx6ull |
| |
[24V DC供电总线] ----|-- 电源管理 |
| |
[RS485 总线] -------|-- Modbus RTU 轮询 |
| |
[时统总线] ---------|-- 50kHz 同步信号 |
| |
[TCP] -------------|-- MQTT/Modbus TCP |
| |
[屏幕] ------------|-- 数据校准/状态显示 |
| |
[LM75] ------------|-- 温度监控 |
+---------------------+
↑ ↓
RS485 TCP
↓ ↑
[STM32节点] [NI 软件]总结
-
网关是系统的核心枢纽,负责协议转换、同步控制、数据聚合和人机交互。
-
关键设计亮点:
-
硬实时同步(50kHz 时统信号)。
-
多协议兼容(RS485 + TCP/MQTT)。
-
工业级可靠性(24V 总线供电、温度监控)。
-
这种架构既满足高速数据采集的实时性,又支持灵活的云端/上位机扩展。
左半部分
采集端(STM32F4节点)功能详解
1. 信号采集链路
plaintext
复制
下载
应变片 → 惠斯通电桥 → 放大电路(×100) → STM32F4 ADC → DMA → 内存 → RS485传输(1) 应变片
-
作用:粘贴在炮膛表面,将机械形变转换为电阻变化(ΔR/R ≈ 应变ε × 灵敏系数K)。
-
典型参数:
-
阻值:120Ω/350Ω
-
灵敏系数K:2.0
-
(2) 惠斯通电桥
-
功能:将应变片的微小电阻变化(ΔR)转换为差分电压信号(ΔV)。
-
配置:
-
1/4桥(单应变片+3固定电阻)或半桥/全桥(更高灵敏度)。
-
激励电压:通常2.5V或5V(由24V DC总线降压提供)。
-
-
输出公式:
𝑉𝑜𝑢𝑡=𝑉𝑒𝑥𝑐𝑖𝑡𝑎𝑡𝑖𝑜𝑛⋅Δ𝑅4𝑅Vout=Vexcitation⋅4RΔR
(3) 放大电路(×100)
-
目的:放大电桥输出的微弱信号(通常μV~mV级)。
-
方案:
-
仪表放大器(如AD620、INA128),抑制共模噪声。
-
增益G=100,带宽需覆盖应变信号频率(如0-10kHz)。
-
(4) STM32F4 ADC
-
关键配置:
-
12位ADC,采样率1MHz(实际有效位ENOB≈10位)。
-
输入范围:0-3.3V(对应放大后信号)。
-
-
DMA传输:
- 直接存储ADC数据到内存,避免CPU干预,确保实时性。
(5) RS485传输
-
协议:Modbus RTU(从机模式)。
-
硬件:
-
通过UART + MAX485芯片转换电平。
-
总线终端电阻120Ω(匹配阻抗,防反射)。
-
2. 供电与时统同步
(1) 24V DC供电总线
-
用途:
- 为STM32核心板、电桥激励电压、运放供电。
-
电源树:
plaintext
复制
下载
24V → DCDC降压 → 5V(运放) → LDO → 3.3V(STM32) ↓ 2.5V(电桥激励)
(2) 时统总线
-
同步机制:
- 网关通过50kHz中断信号(IO翻转)触发所有STM32同步采样。
-
STM32响应:
- 外部中断(EXTI)唤醒ADC,启动DMA传输。
3. 多节点拓扑
plaintext
复制
下载
[网关imx6ull]
|
RS485总线(Modbus RTU)
┌───────┴───────┐
[STM32节点1] [STM32节点2]
(应变片x6) (应变片x6)-
地址分配:每个STM32设置唯一Modbus地址(如0x01, 0x02)。
-
轮询方式:网关依次询问各节点,避免总线冲突。
4. 关键设计考量
| 模块 | 挑战 | 解决方案 |
|---|---|---|
| 应变片 | 温度漂移、非线性误差 | 软件校准(零点/灵敏度补偿) |
| 电桥 | 共模干扰(电磁噪声) | 屏蔽线、差分走线、低噪声LDO供电 |
| ADC | 采样抖动影响同步精度 | 外部时统信号触发+硬件定时器 |
| RS485 | 长距离传输衰减 | 终端电阻、波特率≤115200bps |
5. 数据流示例
-
时统触发:网关发送同步脉冲→STM32中断→启动ADC。
-
ADC采样:DMA连续采集100点(如10kHz采样率,10ms波形)。
-
数据处理:卡尔曼滤波后存入缓冲区。
-
响应查询:网关Modbus请求到来时,通过RS485返回数据。
总结
-
采集端核心任务:高精度应变信号采集、同步、预处理。
-
工业级设计:
-
惠斯通电桥 + 仪表放大保障信号质量。
-
DMA + 时统总线实现硬实时性。
-
Modbus RTU标准化通信。
-
-
扩展性:可通过增加节点数扩展监测点位。
名词解释:
1、网关(Gateway)是连接不同通信网络或协议的桥梁设备,核心功能包括:
-
协议转换(如 Modbus RTU → MQTT/TCP)
-
网络层级跨越(如 RS485 串行网络 ↔ 以太网)
-
数据聚合与路由(如多个采集节点数据统一上传)
网关的具体实现
-
Modbus 侧:
- 网关通过 RS485 + Modbus RTU 与 STM32 通信(主从轮询)。
-
以太网侧:
- 网关运行 TCP/UDP/MQTT,与上位机(NI 软件)交互。
-
额外功能:
- 时统信号生成、温度监控、人机界面(屏幕)。
2、时统(时间统一系统)的概念
时统 (Time Synchronization System,时间统一系统)是指为分布式系统中的多个设备或节点提供高精度、统一的时间基准,确保各节点能够按照相同的时间标准执行操作(如数据采集、控制指令响应等)。
在您的炮弹发射监测系统中,时统信号的作用是:
-
同步触发采集 :所有STM32采集节点在接收到网关发出的时统信号(如硬件中断)后,同时启动ADC采样 ,确保多通道应变数据的时间对齐。
-
数据时间戳对齐:后续分析时,可通过时统信号的时间标记,将不同节点的数据精确关联到同一时间点(例如炮弹发射瞬间的炮膛应变分布)。
3、RS485以太网网关
-
RS485是物理层协议 ,但它通常与应用层协议(如Modbus)结合使用。
-
网关的核心作用 是完成协议栈的跨层级转换,例如将RS485上的Modbus数据转换为TCP/IP协议(如MQTT)。
-
"兼容TCP/UDP/MQTT" 指的是网关的以太网侧支持的传输层/应用层协议,而非RS485本身。
-
TCP/UDP:传输层协议,提供可靠(TCP)或实时(UDP)的数据传输。
- 例如:网关通过TCP接收上位机指令,通过UDP广播时统信号。
-
MQTT:应用层协议,基于发布/订阅模型,适合物联网场景。
- 例如:网关将应变数据以MQTT报文发布到上位机(NI软件可订阅该主题)。
4、Modbus:工业控制的"老将"
核心特点
-
主从架构:
-
一个主设备(如网关)主动轮询多个从设备(如STM32采集节点),从设备仅在收到请求时响应。
-
例如:网关通过Modbus RTU(RS485)读取STM32的应变数据寄存器。
-
-
寄存器模型:
-
数据以寄存器(16位整数)形式组织,分为:
-
线圈(Coils):布尔量(可读可写,如开关状态)。
-
保持寄存器(Holding Registers):数值(可读可写,如ADC采样值)。
-
-
例如:STM32将应变数据存储在保持寄存器中,网关通过Modbus功能码
0x03读取。
-
-
两种变体:
-
Modbus RTU:基于RS485/RS232,二进制帧,紧凑高效。
-
Modbus TCP:基于以太网,在TCP/IP上封装Modbus协议(去除了CRC校验,改用TCP校验)。
-
在您的项目中的应用
-
STM32采集节点作为Modbus从设备,通过RS485暴露寄存器(如存储应变数据的地址)。
-
网关作为Modbus主设备,轮询各节点数据,再转换为MQTT上传至上位机。
-
Modbus RTU 通常运行在 UART + RS485/RS232 上,二者协同完成工业设备通信。
-
Modbus TCP 则完全脱离 UART,直接基于以太网。
-
在您的炮弹监测系统中,UART(RS485) + Modbus RTU 的组合是工业领域的经典选择,兼顾可靠性和实时性。
5、环控
-
"环控"=环境控制,核心是通过传感器数据动态调节设备运行环境。
-
在您的网关中:
-
温度采集:板载传感器实时监测内部温度。
-
散热控制:基于温度阈值调节风扇转速,保障imx6ull稳定运行。
-
-
实现关键:
-
硬件上需支持传感器接口和PWM输出。
-
软件上需编写闭环控制逻辑(如PID算法或阈值控制)。
-
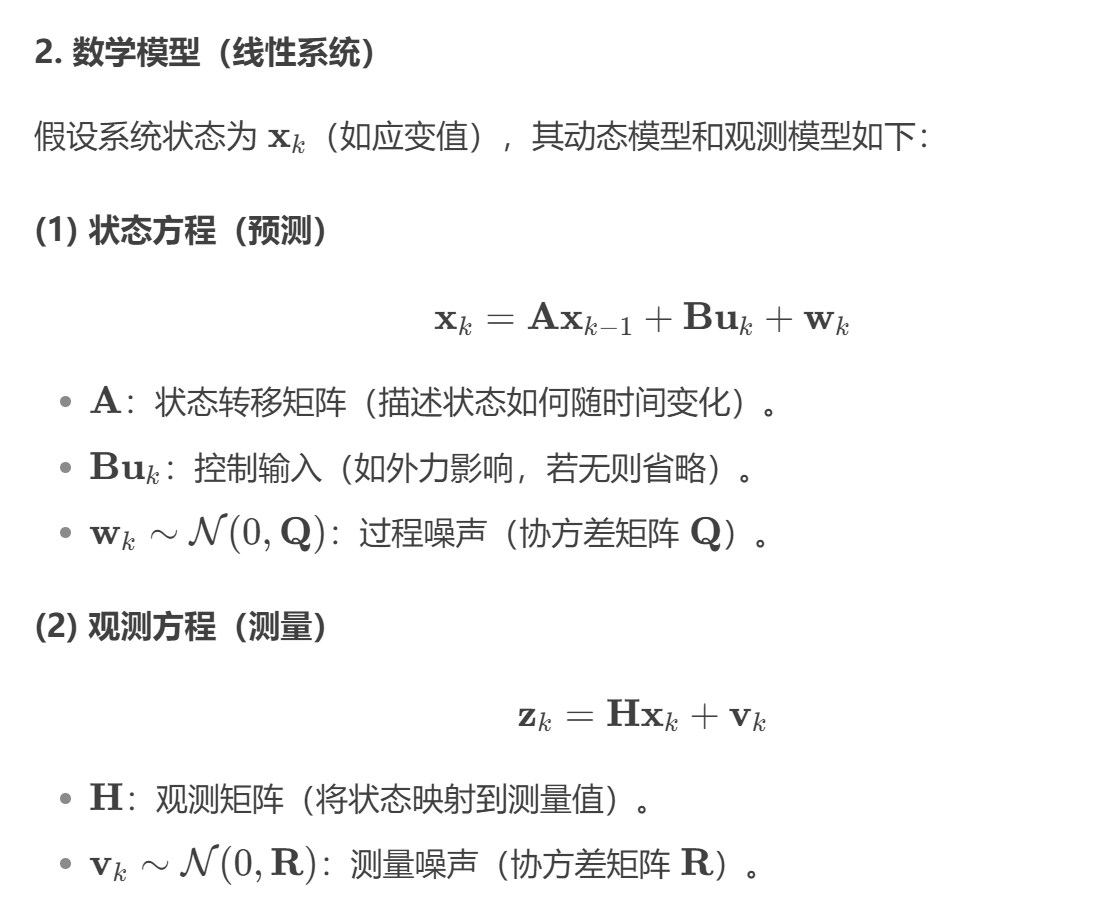
6、卡尔曼滤波
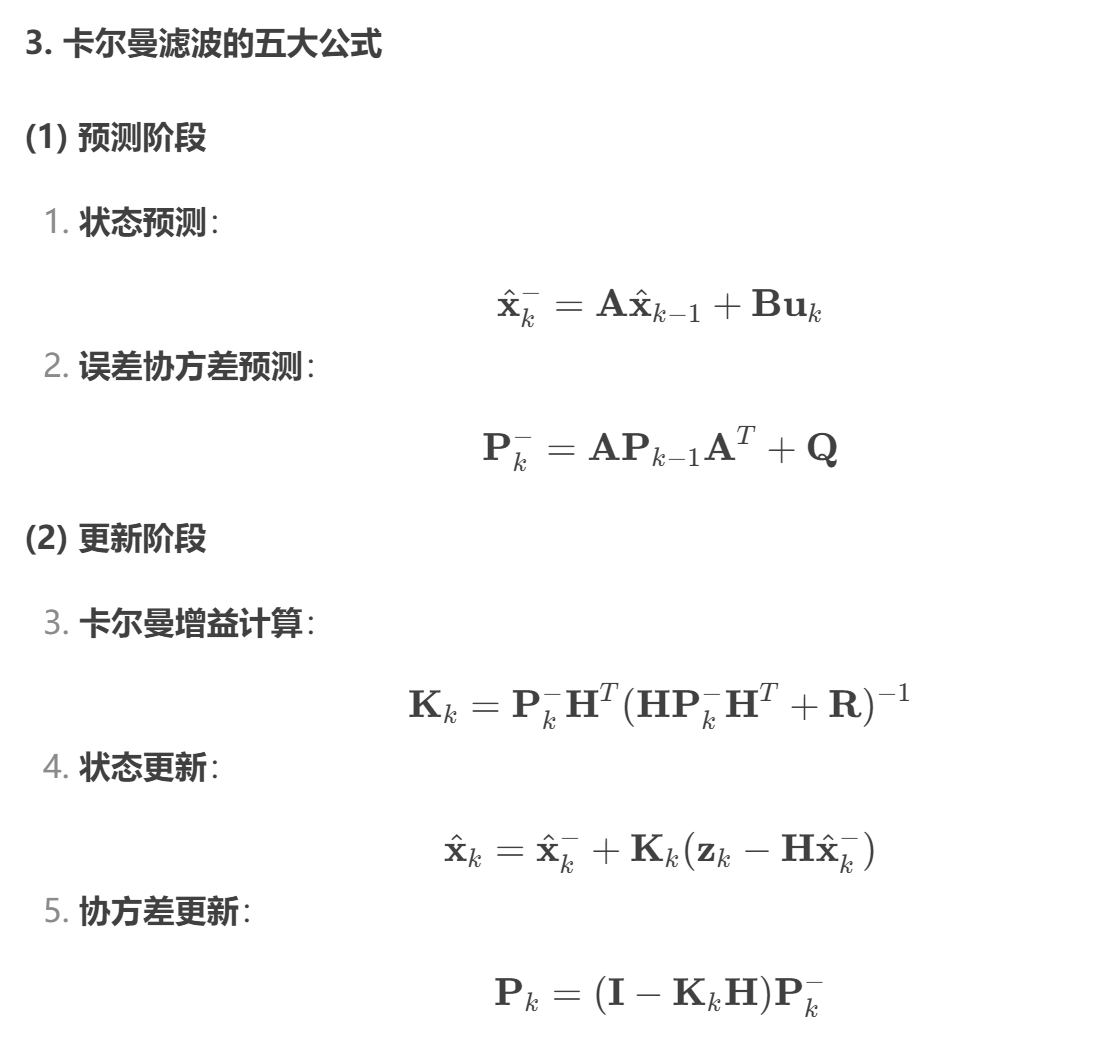
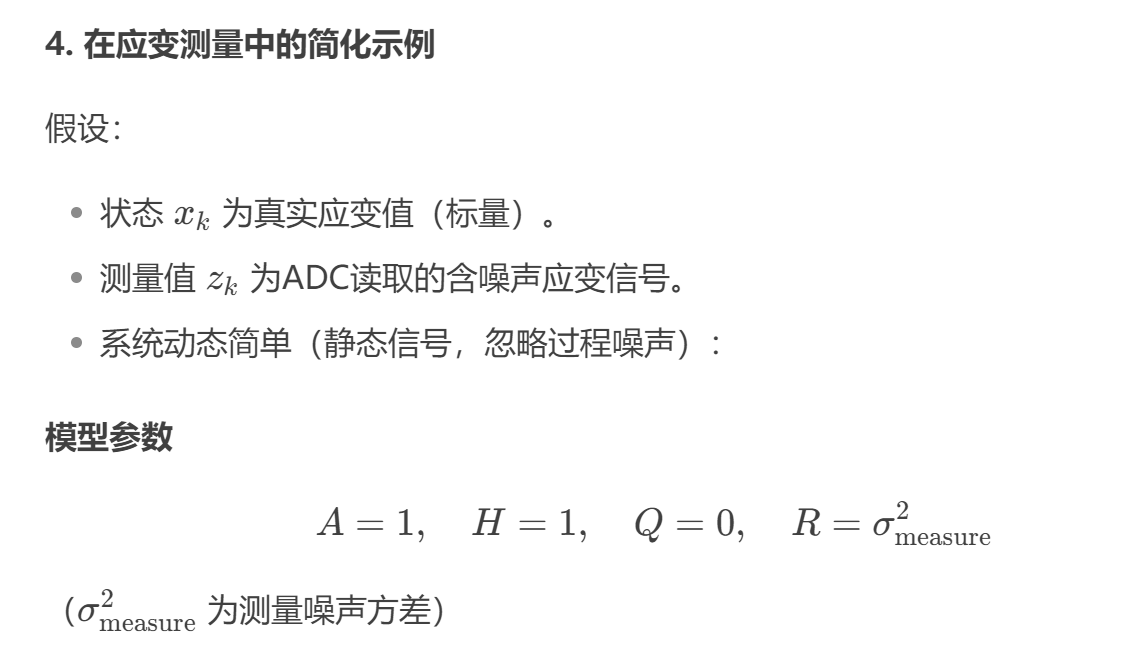
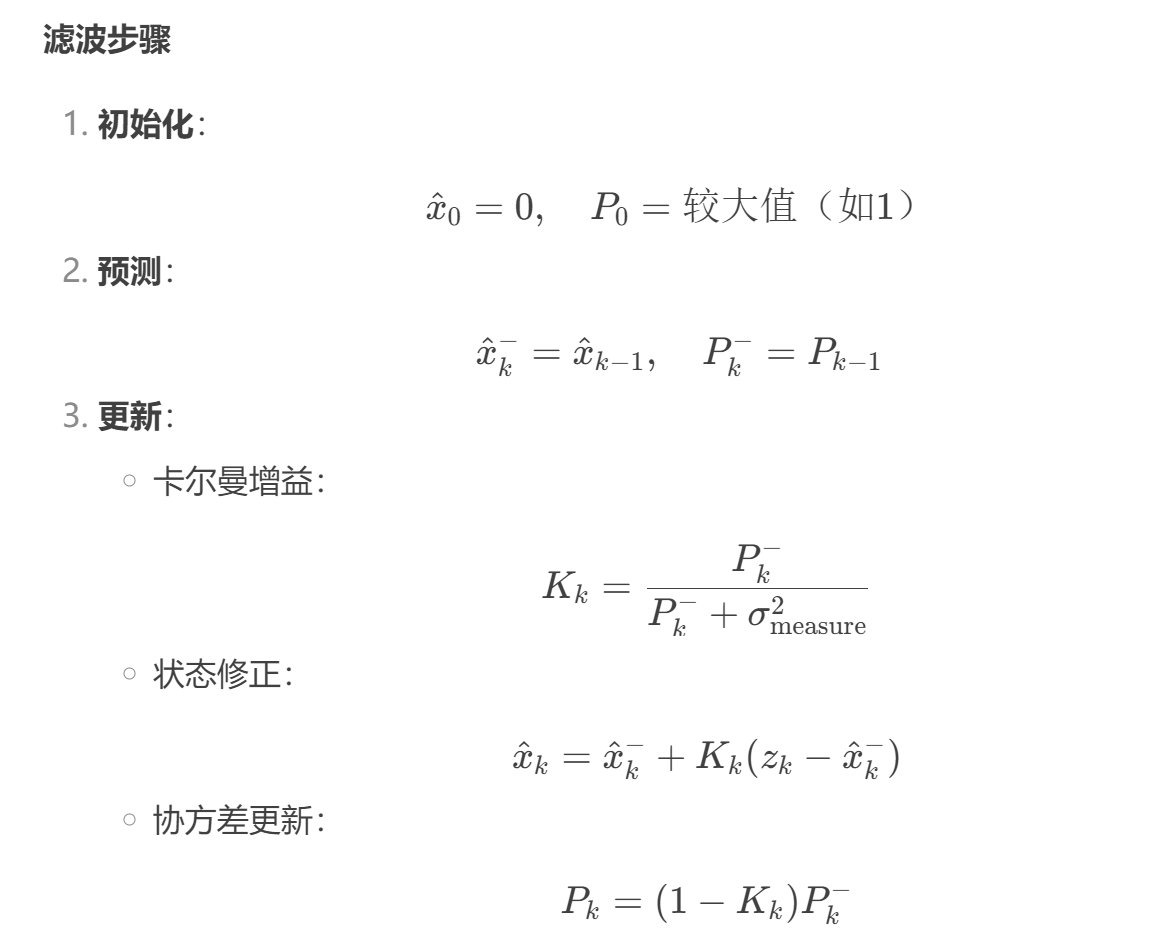
// 初始化
float x_hat = 0.0; // 初始状态估计
float P = 1.0; // 初始误差协方差
float Q = 0.001; // 过程噪声方差(假设微小)
float R = 0.1; // 测量噪声方差(需根据传感器校准)
void kalman_update(float z_k) {
// 预测
float x_hat_minus = x_hat;
float P_minus = P + Q;
// 更新
float K = P_minus / (P_minus + R);
x_hat = x_hat_minus + K * (z_k - x_hat_minus);
P = (1 - K) * P_minus;
// 返回滤波后的值 x_hat
}

| 场景 | 推荐算法 | 理由 |
|---|---|---|
| 嵌入式实时滤波(STM32) | 卡尔曼滤波 | 低计算量,最优估计 |
| 离线数据分析(NI上位机) | 小波变换 | 可捕捉瞬态冲击信号 |
| 简单传感器去噪 | 滑动平均/中值滤波 | 实现成本低 |
| 非线性系统(如姿态估计) | 粒子滤波 | 能处理复杂动力学 |
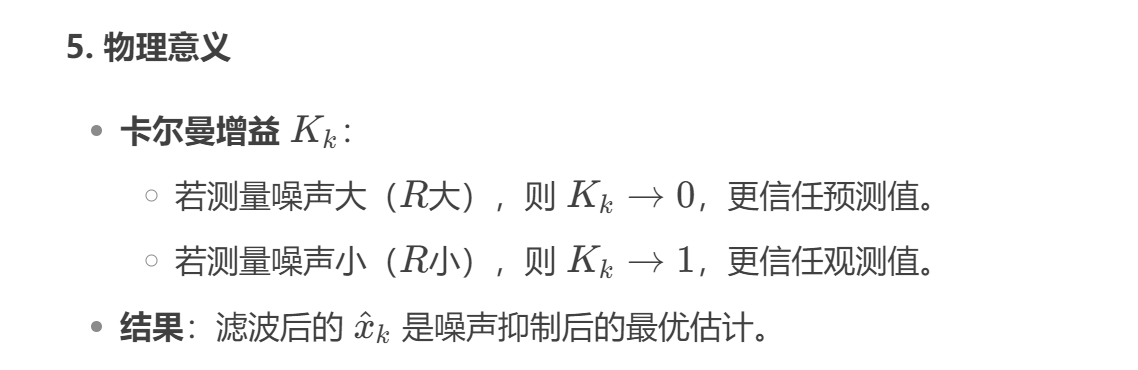
核心思想 "卡尔曼滤波是一种基于状态空间模型的最优递归估计算法,通过预测-更新两步循环,在存在噪声的系统中动态估计真实状态。它的核心优势是结合系统动力学模型和实时观测值,通过协方差矩阵动态调整对预测和测量的信任权重。"太复杂了,有没有简单描述
一句话极简版
"卡尔曼滤波是一个动态称重算法------它根据你对系统的了解(预测)和传感器的测量(观测),自动计算两者的可信度比例,给出最优结果。"
通俗类比版
想象你在蒙眼走路:
-
预测:你根据上一步的位置和速度,估算现在该在哪。
-
测量:你用手摸墙(但手会抖,测量不准)。
-
卡尔曼滤波:综合你的步长推算和手的触觉,算出最可能的位置。
工程人话版
"它是一个实时去噪算法,一边用物理规律猜数据该是多少,一边用传感器测数据,最后按两者的可靠程度加权平均。"
面试场景用法
先抛简单版:"就像天气预报,结合昨天的预测(模型)和今天的卫星数据(测量),给出更准的结果。"
再补技术细节:"具体是通过状态方程和观测方程,用协方差矩阵..." (展示深度)