一、原理介绍
在非线性磁链观测器的基础之上增加零速启动算法,可以实现任意位置启动。
二、仿真模型
在MATLAB/simulink里面验证所提算法,搭建仿真。采用和实验中一致的控制周期1e-4,电机部分计算周期为5e-7。仿真模型如下所示:
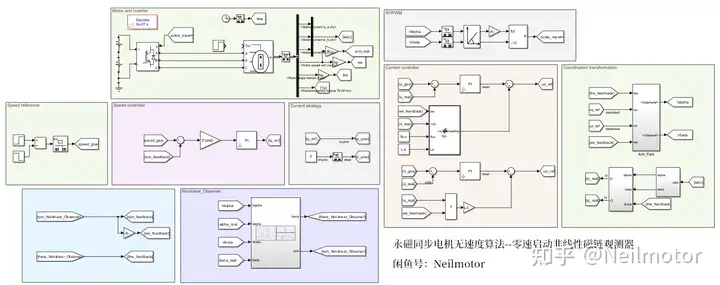
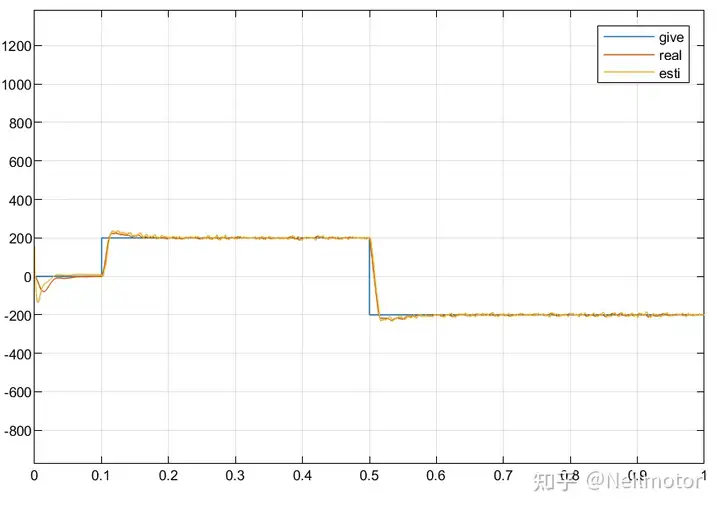
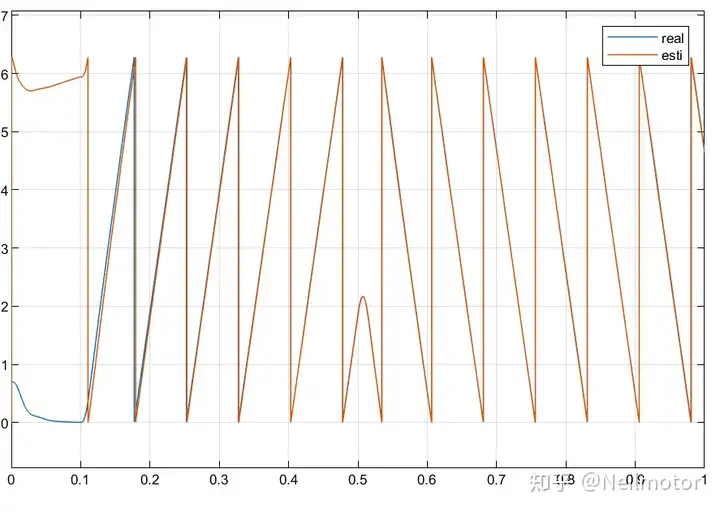
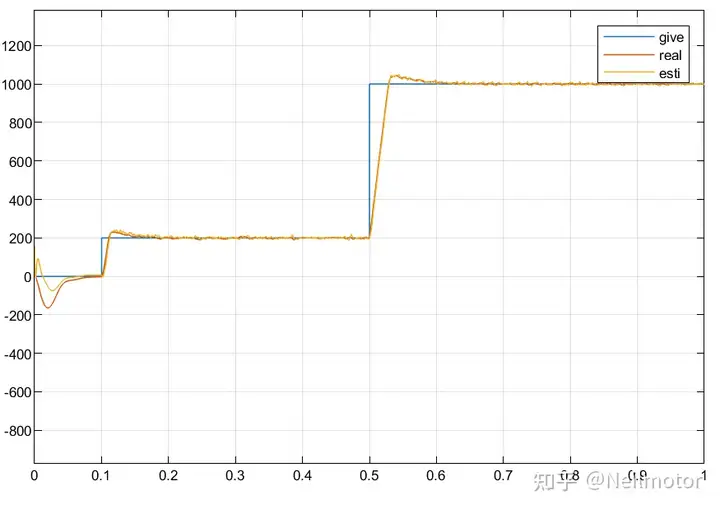
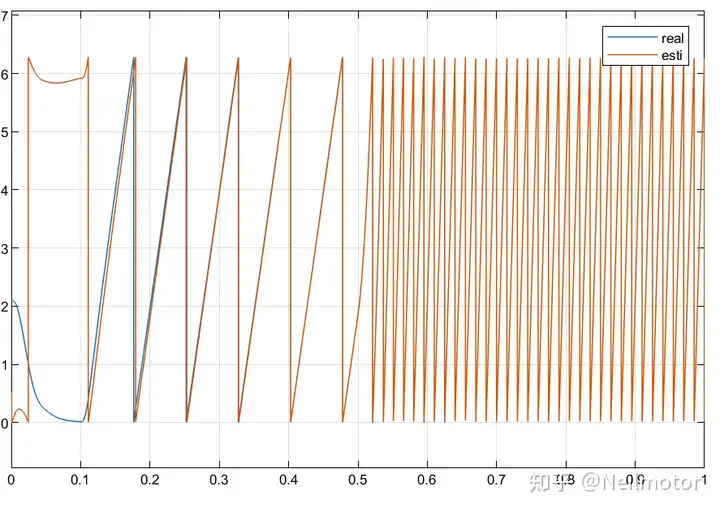
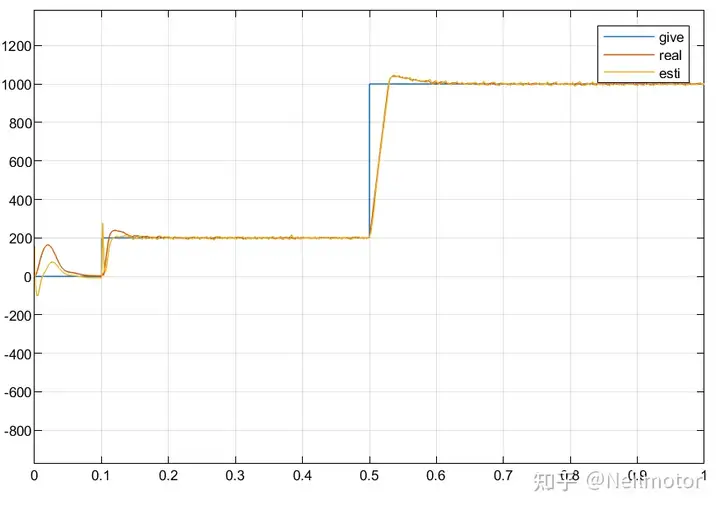
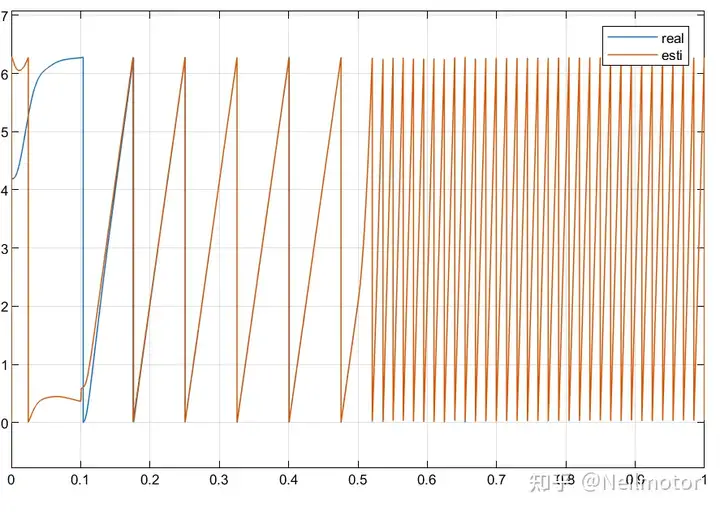
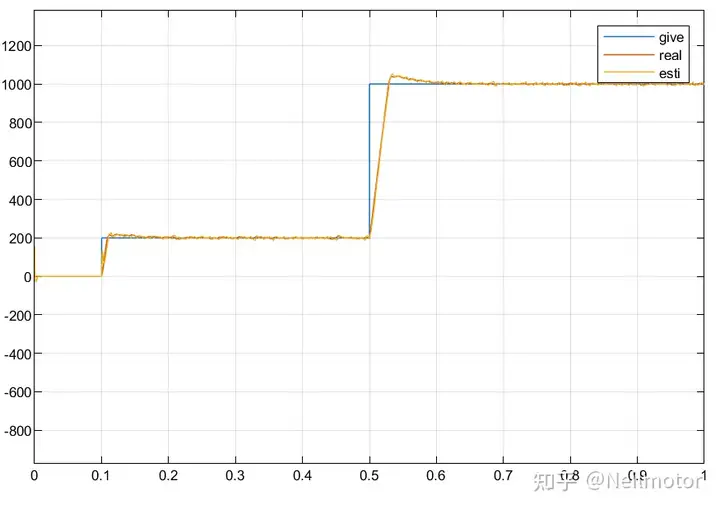
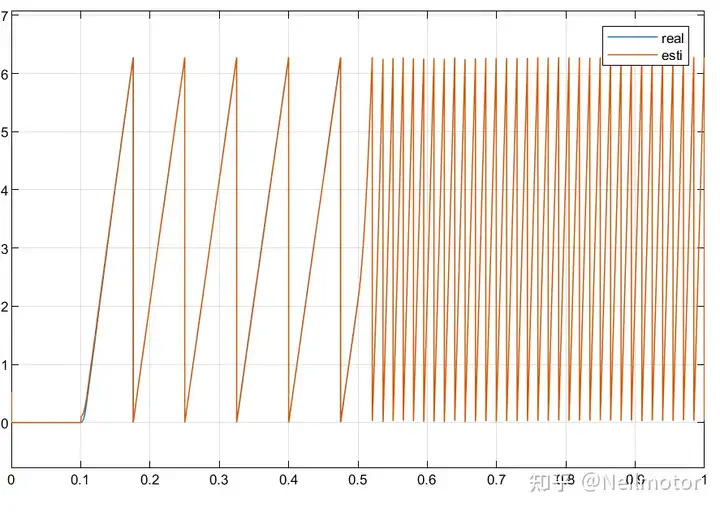
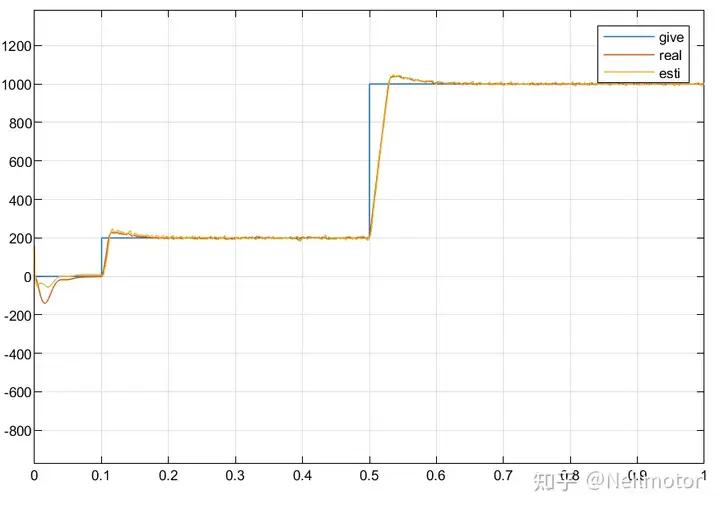
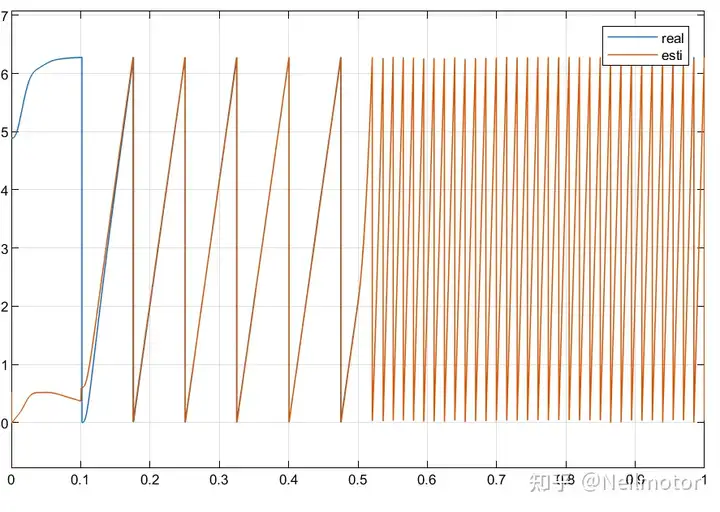
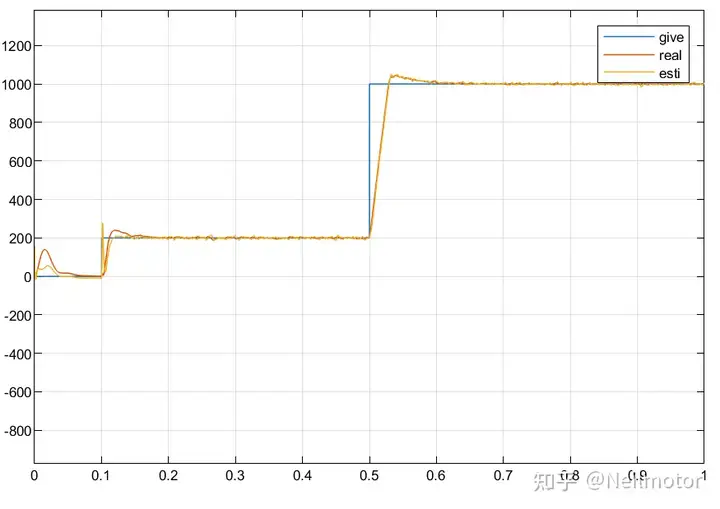
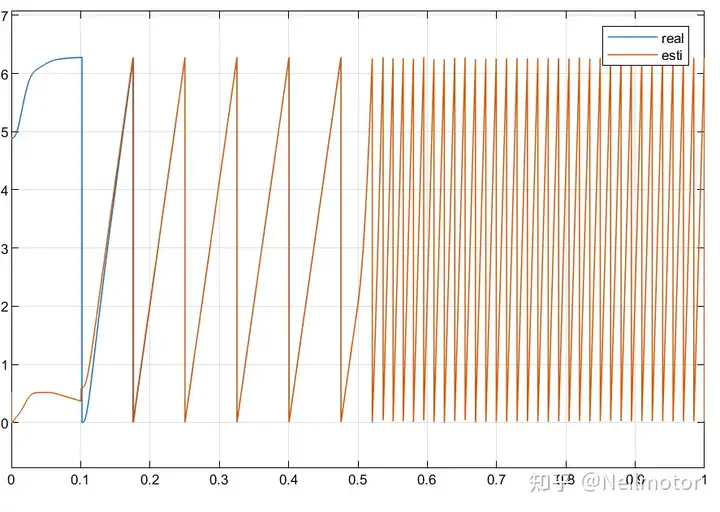
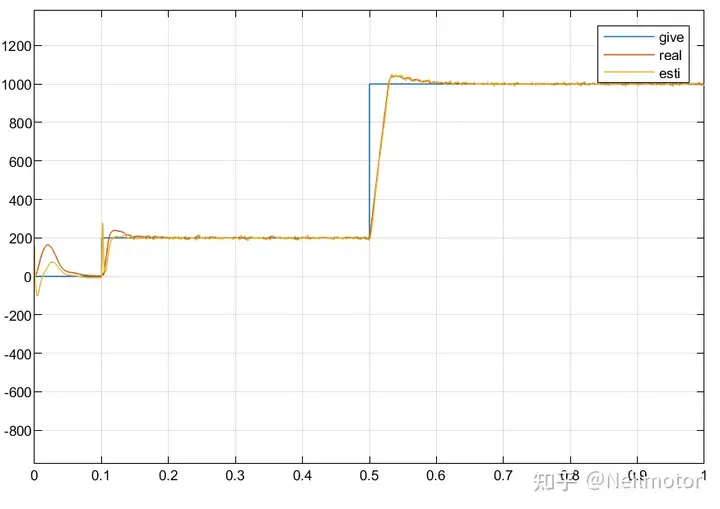
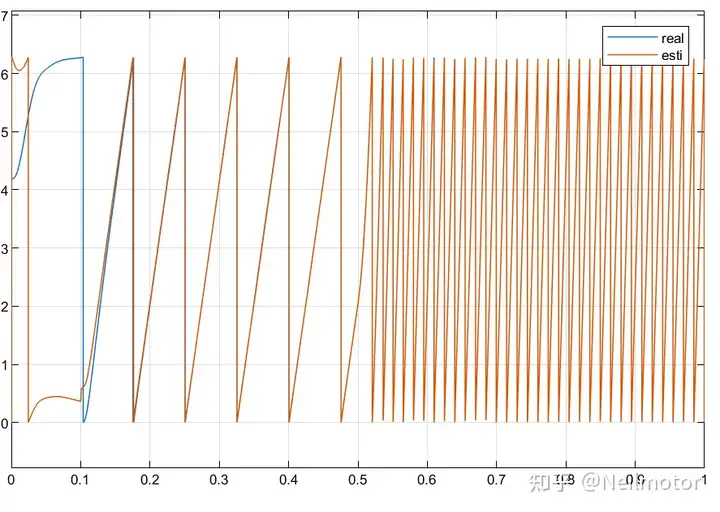
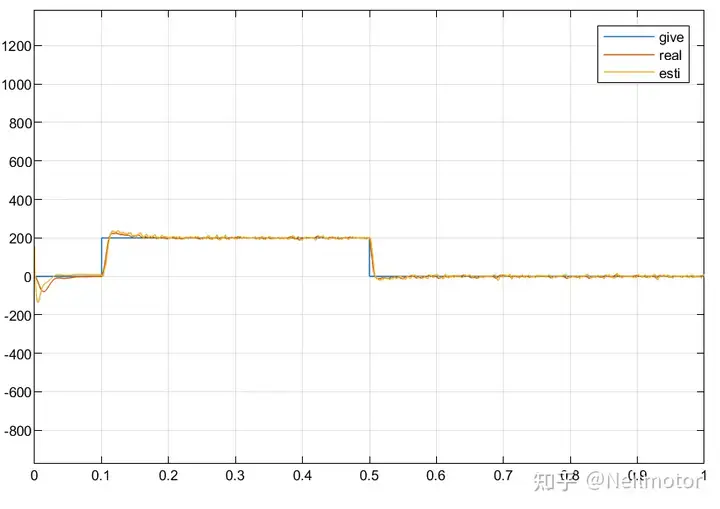
**仿真工况:**分别设置转子初始角度为30°,60°,90°,110°,160°,250°,330°。电机空载零速启动,0.1s给定转速阶跃至200rpm,0.5s给定转速阶跃至1000rpm
2.1转子初始角度为30°的转速、转子位置波形
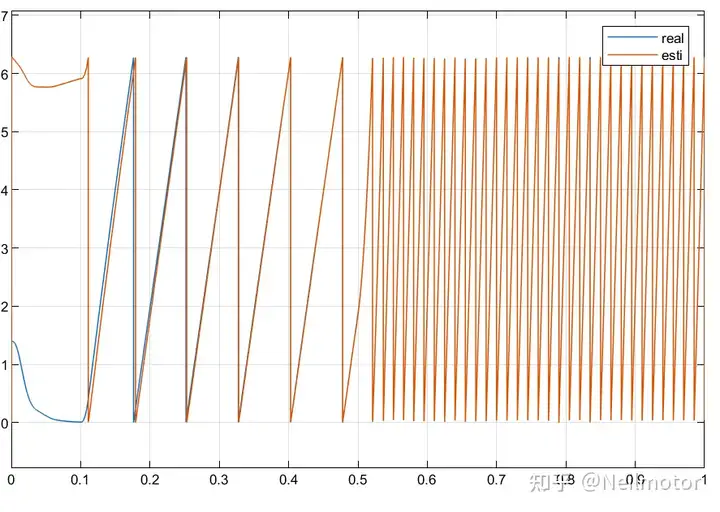
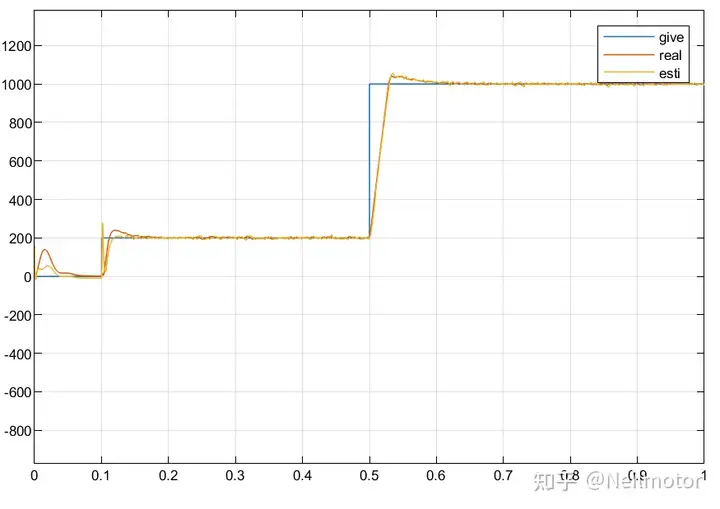
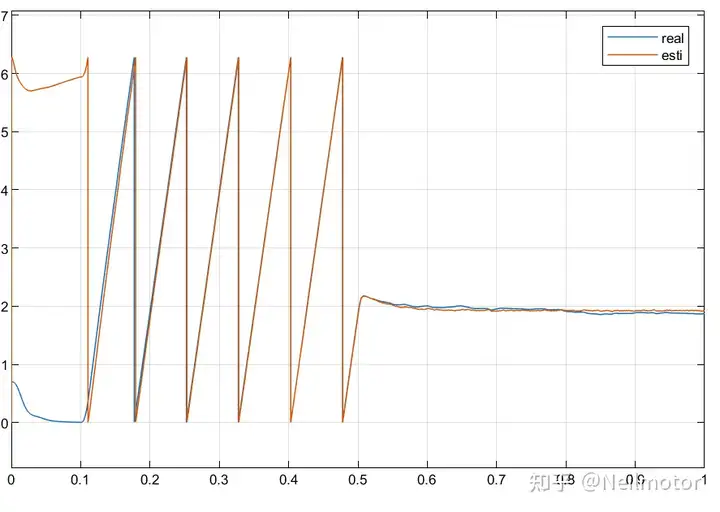
2.2转子初始角度为60°的转速、转子位置波形
2.3转子初始角度为90°的转速、转子位置波形
2.4转子初始角度为110°的转速、转子位置波形
2.5转子初始角度为160°的转速、转子位置波形
2.6转子初始角度为250°的转速、转子位置波形
2.7转子初始角度为330°的转速、转子位置波形
2.8电机正转切零速的转速、转子位置波形
2.9电机正转切反转的转速、转子位置波形