文章目录
- 一、背景需求
- 二、创建ActionNodes
-
- [1. 功能实现](#1. 功能实现)
-
- [1.1 头文件定义](#1.1 头文件定义)
- [1.2 源文件实现](#1.2 源文件实现)
- [1.3 main文件实现](#1.3 main文件实现)
- [1.4 my_tree.xml 实现](#1.4 my_tree.xml 实现)
- [2. 执行结果](#2. 执行结果)
- [三、 执行失败处理](#三、 执行失败处理)
-
- [1. 添加尝试次数](#1. 添加尝试次数)
-
- [1.1 功能实现](#1.1 功能实现)
- [1.2 实验结果](#1.2 实验结果)
- [2. 完善异常处理](#2. 完善异常处理)
-
- [2.1 多节点组合兜底](#2.1 多节点组合兜底)
- [2.2 实验结果](#2.2 实验结果)
使用行为树控制机器人(一) ------ 节点
使用行为树控制机器人(二) ------ 黑板
使用行为树控制机器人(三) ------ 通用端口
近期在从ros1导航跨到ros2导航,ros2导航的任务调度逻辑采用的是行为树,所以在魔改ros2导航前先知己知彼学习一下行为树到底是个啥?本文也是在大佬的基础上加入自己的学习过程记录。(如整理有误,还请指点)
学习时参考链接:ROS机器人行为树教程
一、背景需求
关于行为树各节点的定义及其作用的博客整理,可以先参考链接中的教程,后续看自己是否有时间整理,本文直接根据需求进行代码实操。通过行为树控制机器人的一简单场景需求如下:

二、创建ActionNodes
1. 功能实现
对于每个动作作为简单案例多以打印输出后,直接返回成功,后续根据对行为树的掌握程度结合实际需求进行自定义复杂需求。
1.1 头文件定义
根据场景需求创建如下 SimpleActionNode:
- CheckBattery()
- GripperInterface::open()
- GripperInterface::close()
- CameraInterface::open()
- CameraInterface::close()
cpp
#ifndef BEHAVIOR_TREE_NODES_H
#define BEHAVIOR_TREE_NODES_H
#include "behaviortree_cpp/bt_factory.h"
#include <iostream>
// 同步动作节点 (无端口)
class ApproachObject : public BT::SyncActionNode
{
public:
ApproachObject(const std::string& name, const BT::NodeConfig& config) : BT::SyncActionNode(name, config)
{}
// 端口是节点与黑板(Blackboard)之间进行数据交换的接口
// 必须实现静态端口声明方法
static BT::PortsList providedPorts() {
return {}; // 无端口
}
BT::NodeStatus tick() override;
};
// 夹爪控制接口
class GripperInterface
{
public:
GripperInterface() : _open(true) {}
BT::NodeStatus open();
BT::NodeStatus close();
private:
bool _open; // 共享状态
};
// 相机控制接口
class CameraInterface
{
public:
CameraInterface() : _open(true) {}
BT::NodeStatus open();
BT::NodeStatus close();
private:
bool _open; // 共享状态
};
// 电池检查函数声明
BT::NodeStatus CheckBattery();
#endif // BEHAVIOR_TREE_NODES_H1.2 源文件实现
cpp
#ifndef BEHAVIOR_TREE_NODES_H
#define BEHAVIOR_TREE_NODES_H
#include "behaviortree_cpp/bt_factory.h"
#include <iostream>
// 同步动作节点 (无端口)
class ApproachObject : public BT::SyncActionNode
{
public:
ApproachObject(const std::string& name, const BT::NodeConfig& config) : BT::SyncActionNode(name, config)
{}
// 端口是节点与黑板(Blackboard)之间进行数据交换的接口
// 必须实现静态端口声明方法
static BT::PortsList providedPorts() {
return {}; // 无端口
}
BT::NodeStatus tick() override;
};
// 夹爪控制接口
class GripperInterface
{
public:
GripperInterface() : _open(true) {}
BT::NodeStatus open();
BT::NodeStatus close();
private:
bool _open; // 共享状态
};
// 相机打开
BT::NodeStatus CameraInterface::open()
{
_open = true;
std::cout << "CameraInterface::open" << std::endl;
return BT::NodeStatus::SUCCESS;
}
// 相机关闭
BT::NodeStatus CameraInterface::close()
{
std::cout << "CameraInterface::close" << std::endl;
_open = false;
return BT::NodeStatus::SUCCESS;
}
// 电池检查函数声明
BT::NodeStatus CheckBattery();
#endif // BEHAVIOR_TREE_NODES_H1.3 main文件实现
cpp
#include "behavior_tree_nodes.h"
#include "behaviortree_cpp/bt_factory.h"
int main()
{
// 创建行为树工厂
BT::BehaviorTreeFactory factory;
// 注册自定义节点
factory.registerNodeType<ApproachObject>("ApproachObject");
// 注册简单条件节点 (使用正确的lambda签名)
factory.registerSimpleCondition("CheckBattery", [](BT::TreeNode&) { return CheckBattery(); });
// 创建相机、夹爪实例并注册动作
CameraInterface camera;
GripperInterface gripper;
factory.registerSimpleAction("OpenCamera", [&camera](BT::TreeNode&) { return camera.open(); });
factory.registerSimpleAction("OpenGripper", [&gripper](BT::TreeNode&) { return gripper.open(); });
factory.registerSimpleAction("CloseGripper", [&gripper](BT::TreeNode&) { return gripper.close(); });
factory.registerSimpleAction("CloseCamera", [&camera](BT::TreeNode&) { return camera.close(); });
try {
// 从XML文件加载行为树
auto tree = factory.createTreeFromFile("../trees/my_tree.xml");
// 打印树结构 (调试用)
std::cout << "------ Behavior Tree Structure ------" << std::endl;
BT::printTreeRecursively(tree.rootNode());
std::cout << "------------------------------------" << std::endl;
// 执行行为树
tree.tickWhileRunning();
} catch (const std::exception& e) {
std::cerr << "Error: " << e.what() << std::endl;
return 1;
}
return 0;
}上述采用的是三种注册节点方式:
- registerNodeType
- registerSimpleCondition
- registerSimpleAction
特性维度 registerNodeType registerSimpleAction registerSimpleCondition 节点基类 需继承 BT::ActionNode 等 自动封装为 SimpleActionNode 自动封装为 SimpleConditionNode 返回值 自行实现 tick() 返回状态 SUCCESS/FAILURE/RUNNINGLambda 返回 NodeStatus SUCCESS/FAILURE/RUNNINGLambda 返回 bool SUCCESS/FAILURE数据交互 通过黑板端口(强类型) 可选端口(需手动检查) 无端口(纯条件检查) 状态维护 支持(成员变量) 不支持(无状态) 不支持 典型用途 复杂动作/控制节点 简单一次性动作 条件判断(瞬时完成) 生命周期控制 可重写 halt() 等方法 无 无 线程安全 更易实现 需外部保证 需外部保证
1.4 my_tree.xml 实现
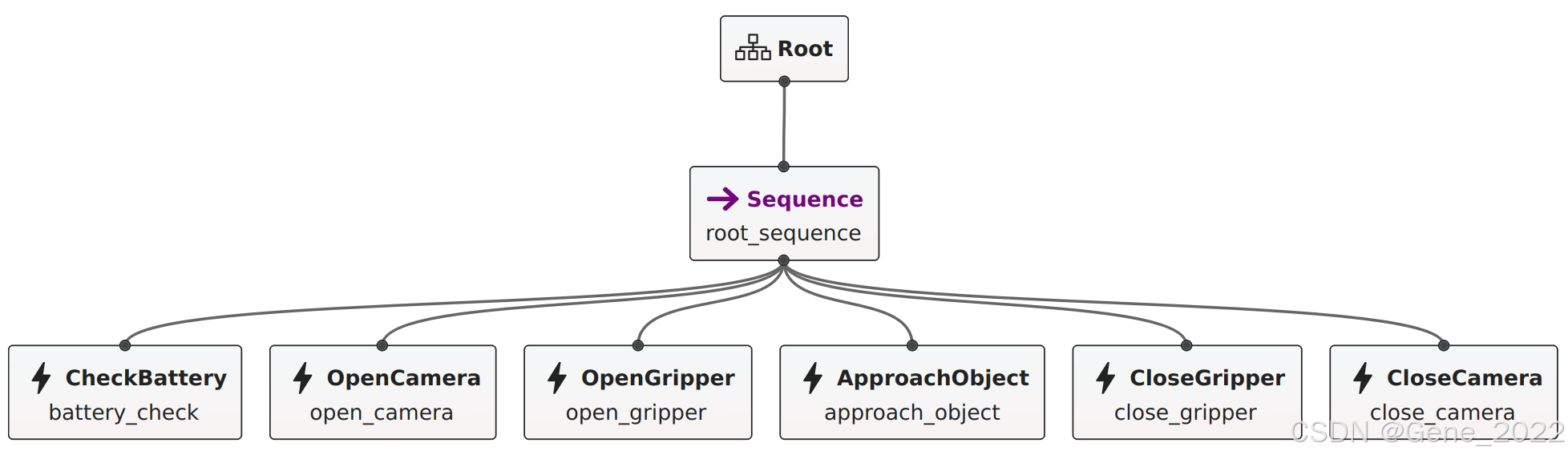
行为树实现逻辑如上,xml文件定义如下:
xml
<root BTCPP_format="4" main_tree_to_execute="MainTree">
<BehaviorTree ID="MainTree">
<Sequence name="root_sequence">
<CheckBattery name="battery_check"/>
<OpenCamera name="open_camera"/>
<OpenGripper name="open_gripper"/>
<ApproachObject name="approach_object"/>
<CloseGripper name="close_gripper"/>
<CloseCamera name="close_camera"/>
</Sequence>
</BehaviorTree>
</root>注意
XML中使用的标识符必须与用于注册TreeNodes的标识符相一致,比如:xml文件定义的CheckBattery 要和 main文件中 factory.registerSimpleCondition("CheckBattery", [](BT::TreeNode&) { return CheckBattery(); });的CheckBattery 作对应。
2. 执行结果
bash
------ Behavior Tree Structure ------
----------------
root_sequence
battery_check
open_camera
gripper_control
RetryUntilSuccessful
open_gripper
recovery_sequence
close_camera_on_failure
ForceFailure
recovery_success
approach_object
close_gripper
close_camera
----------------
------------------------------------
[ Battery: OK ]
CameraInterface::open
GripperInterface::open successfully!
ApproachObject: approach_object
GripperInterface::close
CameraInterface::close三、 执行失败处理
1. 添加尝试次数
1.1 功能实现
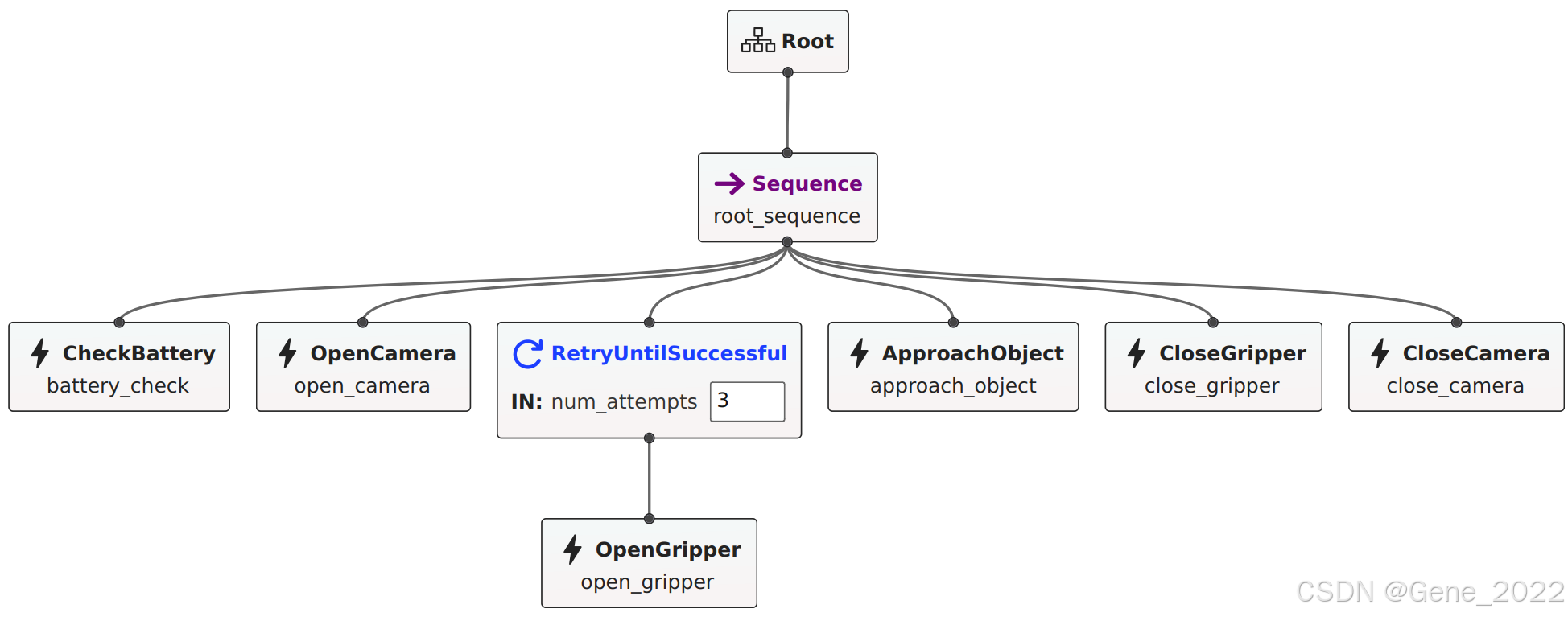
观察整个功能实现逻辑,如出现执行异常(如,夹爪初始化中打开夹爪失败),无再次尝试的可能。故调整代码,在对打开夹爪进行多次打开尝试,如尝试3次,3次尝试都失败再返回错误。行为树逻辑及xml文件如下:
xml
<root BTCPP_format="4" main_tree_to_execute="MainTree">
<BehaviorTree ID="MainTree">
<Sequence name="root_sequence">
<CheckBattery name="battery_check"/>
<OpenCamera name="open_camera"/>
<RetryUntilSuccessful num_attempts="3">
<OpenGripper name="open_gripper"/>
</RetryUntilSuccessful>
<ApproachObject name="approach_object"/>
<CloseGripper name="close_gripper"/>
<CloseCamera name="close_camera"/>
</Sequence>
</BehaviorTree>
</root>为了实现打开次数的尝试,为打开夹爪添加变量计数:
cpp
// 夹爪打开
BT::NodeStatus GripperInterface::open()
{
if(_open_cnt < 2)
{
_open_cnt ++;
std::cout << "\033[1;31m"<< "GripperInterface::open failed!"<< "\033[0m" << std::endl;
return BT::NodeStatus::FAILURE;
}
_open = true;
_open_cnt = 0;
std::cout << "\033[1;32m"<< "GripperInterface::open successfully!"<<"\033[0m" << std::endl;
return BT::NodeStatus::SUCCESS;
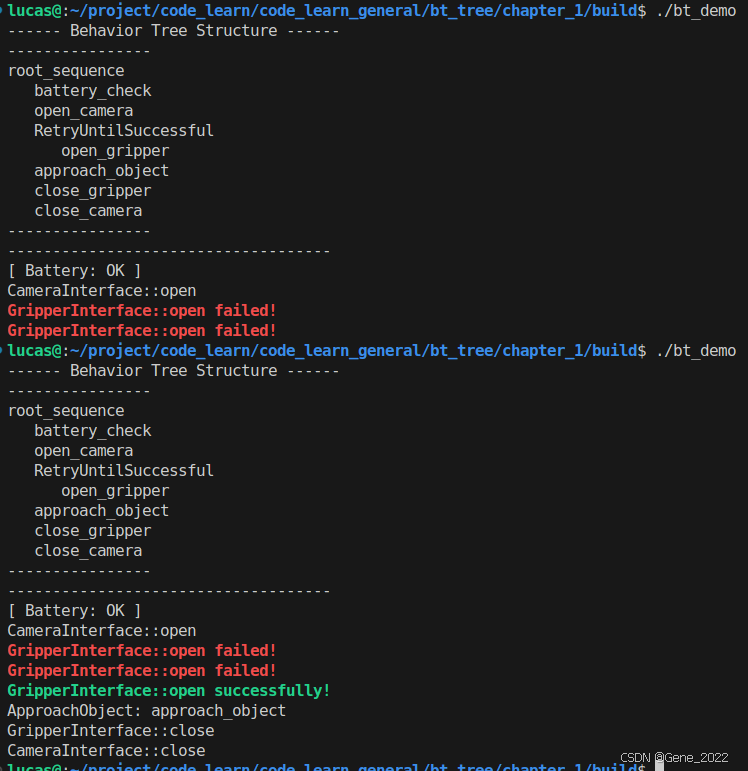
}1.2 实验结果
下图第一次测试,修改xml尝试 2次 打开夹爪失败后,直接返回失败;第二次测试,尝试 3次 打开夹爪并成功运行整个流程。
2. 完善异常处理
2.1 多节点组合兜底
观察尝试多次打开夹爪实现,发现若++尝试打开夹爪多次依旧打开失败,直接躺平,没有进行关闭相机操作++ ,实际场景这是不允许的!!此时就用到了其他节点的组合(此处,想一想该如何组合节点):
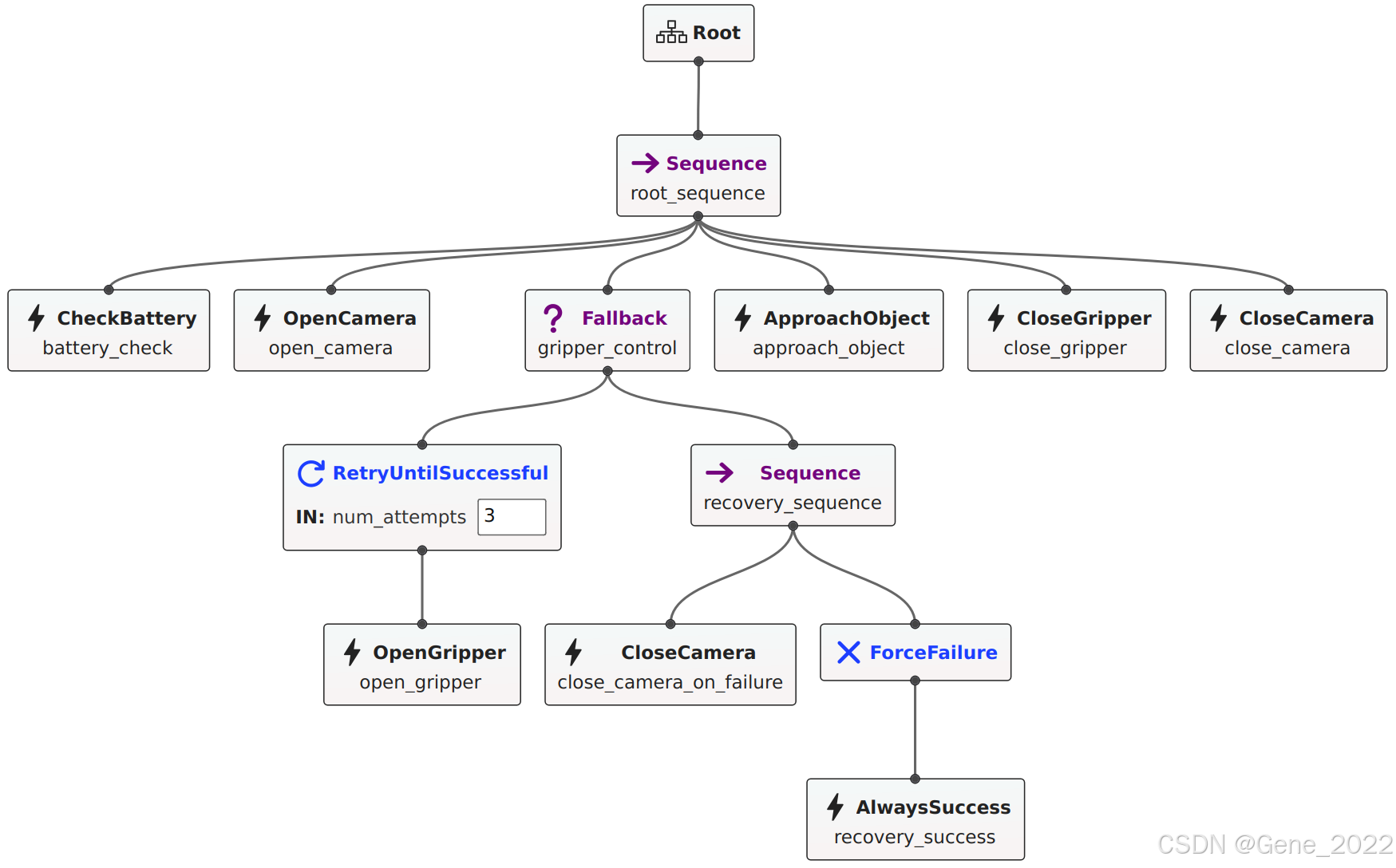
上述行为树表示:
当3次尝试打开夹爪均返回失败,此时通过 Fallback节点,进行关闭相机操作。>
注意 :
ForceFailure装饰器 无论相机是否关闭成功,即:
CloseCamera (SUCCESS) → ForceFailure(AlwaysSuccess) → 最终返回FAILURE CloseCamera (FAILURE) → ForceFailure(AlwaysSuccess) → 最终返回FAILURE
为什么要添加 ForceFailure节点 ,想象一下,若没有该节点,++通过Fallback节点关闭相机成功,此时返回成功,会继续执行ApproachObject、CloseGripper等操作++,这是不允许的。
xml
<root BTCPP_format="4" main_tree_to_execute="MainTree">
<BehaviorTree ID="MainTree">
<Sequence name="root_sequence">
<CheckBattery name="battery_check"/>
<OpenCamera name="open_camera"/>
<!-- 主控制流程 -->
<Fallback name="gripper_control">
<!-- 尝试3次开夹爪 -->
<RetryUntilSuccessful num_attempts="3">
<OpenGripper name="open_gripper"/>
</RetryUntilSuccessful>
<!-- 失败恢复流程 -->
<Sequence name="recovery_sequence">
<CloseCamera name="close_camera_on_failure"/>
<!-- ForceFailure 装饰器, 强制覆盖子节点结果,始终返回FAILURE-->
<ForceFailure>
<AlwaysSuccess name="recovery_success"/>
</ForceFailure>
</Sequence>
</Fallback>
<ApproachObject name="approach_object"/>
<CloseGripper name="close_gripper"/>
<CloseCamera name="close_camera"/>
</Sequence>
</BehaviorTree>
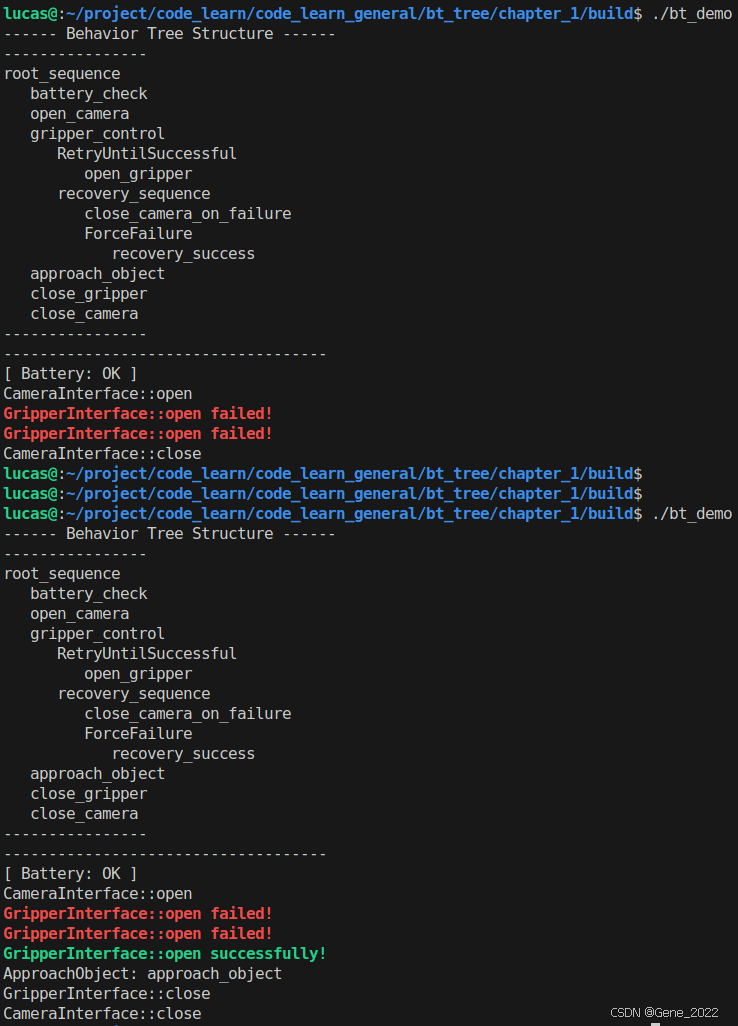
</root>2.2 实验结果
通过下图可以看出:尝试 2次 打开夹爪失败后,先关闭相机后 再直接返回失败;第二次测试,尝试 3次 打开夹爪并成功运行整个流程。