流程
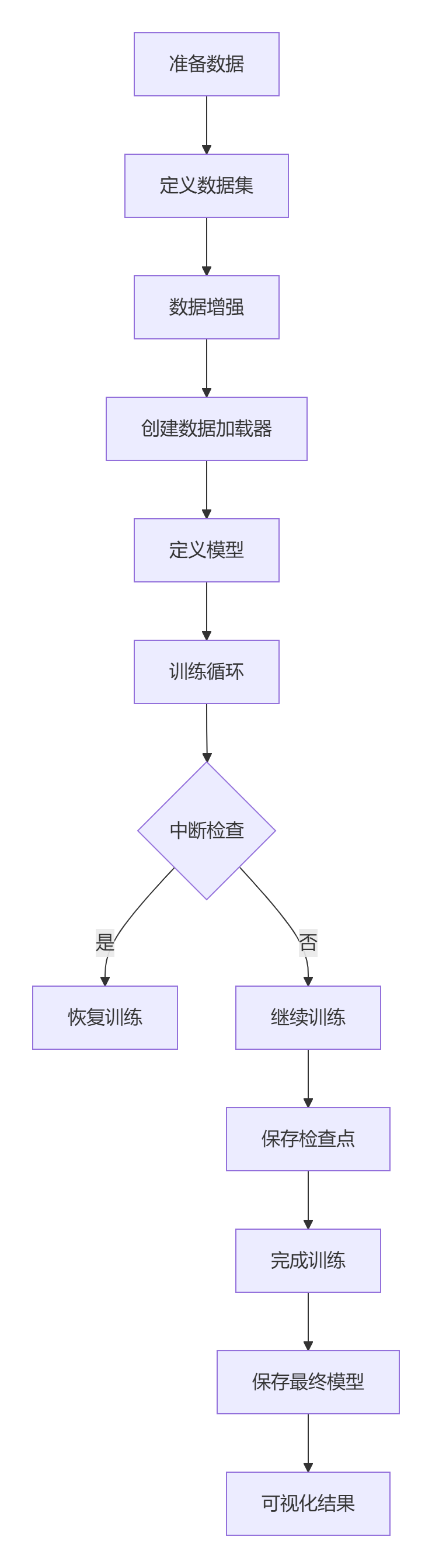 {:width="50%" height="50%"}
{:width="50%" height="50%"}
定义自定义数据集类
python
#======================
#1. 自定义数据集类
#======================
class CustomImageDataset(Dataset):
def __init__(self, root_dir, transform=None):
"""
自定义数据集初始化
:param root_dir: 数据集根目录
:param transform: 数据增强和预处理
"""
self.root_dir = root_dir
self.transform = transform
self.classes = sorted(os.listdir(root_dir))
self.class_to_idx = {cls_name: i for i, cls_name in enumerate(self.classes)}
# 收集所有图像路径和标签
self.image_paths = []
self.labels = []
for cls_name in self.classes:
cls_dir = os.path.join(root_dir, cls_name)
for img_name in os.listdir(cls_dir):
if img_name.lower().endswith(('.jpg', '.png', '.jpeg')):
self.image_paths.append(os.path.join(cls_dir, img_name))
self.labels.append(self.class_to_idx[cls_name])
def __len__(self):
return len(self.image_paths)
def __getitem__(self, idx):
# 加载图像
img_path = self.image_paths[idx]
try:
image = Image.open(img_path).convert('RGB')
except Exception as e:
print(f"Error loading image {img_path}: {e}")
# 返回空白图像作为占位符
image = Image.new('RGB', (224, 224), (0, 0, 0))
# 应用数据增强和预处理
if self.transform:
image = self.transform(image)
# 获取标签
label = self.labels[idx]
return image, label定义训练和验证的数据增强
python
#======================
#2. 数据增强与预处理
#======================
def get_transforms():
"""返回训练和验证的数据增强管道"""
# 训练集增强(更丰富)
train_transform = transforms.Compose([
transforms.RandomResizedCrop(224),
transforms.RandomHorizontalFlip(p=0.5),
transforms.RandomRotation(15),
transforms.ColorJitter(brightness=0.2, contrast=0.2, saturation=0.2),
transforms.ToTensor(),
transforms.Normalize(mean=[0.485, 0.456, 0.406], std=[0.229, 0.224, 0.225])
])
# 验证集预处理(无随机增强)
val_transform = transforms.Compose([
transforms.Resize(256),
transforms.CenterCrop(224),
transforms.ToTensor(),
transforms.Normalize(mean=[0.485, 0.456, 0.406], std=[0.229, 0.224, 0.225])
])
return train_transform, val_transform定义模型、损失函数和优化器
python
#======================
#3. 模型定义
#======================
def create_model(num_classes):
"""创建模型(使用预训练ResNet18)"""
model = resnet18(pretrained=True)
num_ftrs = model.fc.in_features
model.fc = nn.Linear(num_ftrs, num_classes)
return model训练循环,包括验证
python
#======================
#4. 训练函数
#======================
def train_model(model, dataloaders, criterion, optimizer, scheduler, device,
num_epochs=25, checkpoint_path='checkpoint.pth', resume=False):
"""
训练模型并支持中断恢复
:param resume: 是否从检查点恢复训练
"""
# 训练历史记录
history = {
'train_loss': [], 'val_loss': [],
'train_acc': [], 'val_acc': [],
'epoch': 0, 'best_acc': 0.0
}
# 从检查点恢复
start_epoch = 0
if resume and os.path.exists(checkpoint_path):
print(f"Loading checkpoint from {checkpoint_path}")
checkpoint = torch.load(checkpoint_path)
model.load_state_dict(checkpoint['model_state_dict'])
optimizer.load_state_dict(checkpoint['optimizer_state_dict'])
scheduler.load_state_dict(checkpoint['scheduler_state_dict'])
history = checkpoint['history']
start_epoch = history['epoch'] + 1
print(f"Resuming training from epoch {start_epoch}")
# 训练循环
for epoch in range(start_epoch, num_epochs):
print(f'Epoch {epoch+1}/{num_epochs}')
print('-' * 10)
# 更新历史记录
history['epoch'] = epoch
# 每个epoch都有训练和验证阶段
for phase in ['train', 'val']:
if phase == 'train':
model.train() # 设置训练模式
else:
model.eval() # 设置评估模式
running_loss = 0.0
running_corrects = 0
# 迭代数据
for inputs, labels in dataloaders[phase]:
inputs = inputs.to(device)
labels = labels.to(device)
# 梯度清零
optimizer.zero_grad()
# 前向传播
with torch.set_grad_enabled(phase == 'train'):
outputs = model(inputs)
_, preds = torch.max(outputs, 1)
loss = criterion(outputs, labels)
# 训练阶段反向传播和优化
if phase == 'train':
loss.backward()
optimizer.step()
# 统计
running_loss += loss.item() * inputs.size(0)
running_corrects += torch.sum(preds == labels.data)
if phase == 'train':
scheduler.step()
epoch_loss = running_loss / len(dataloaders[phase].dataset)
epoch_acc = running_corrects.double() / len(dataloaders[phase].dataset)
# 记录历史
history[f'{phase}_loss'].append(epoch_loss)
history[f'{phase}_acc'].append(epoch_acc.item())
print(f'{phase} Loss: {epoch_loss:.4f} Acc: {epoch_acc:.4f}')
# 保存最佳模型
if phase == 'val' and epoch_acc > history['best_acc']:
history['best_acc'] = epoch_acc.item()
torch.save(model.state_dict(), 'best_model.pth')
print(f"New best model saved with accuracy: {epoch_acc:.4f}")
# 保存检查点(每个epoch结束后)
checkpoint = {
'epoch': epoch,
'model_state_dict': model.state_dict(),
'optimizer_state_dict': optimizer.state_dict(),
'scheduler_state_dict': scheduler.state_dict(),
'history': history
}
torch.save(checkpoint, checkpoint_path)
print(f"Checkpoint saved at epoch {epoch+1}")
print()
# 保存最终模型
torch.save(model.state_dict(), 'final_model.pth')
print('Training finished!')
return model, history训练可视化
python
#======================
#5. 可视化训练历史
#======================
def plot_history(history):
plt.figure(figsize=(12, 4))
# 损失曲线
plt.subplot(1, 2, 1)
plt.plot(history['train_loss'], label='Train Loss')
plt.plot(history['val_loss'], label='Validation Loss')
plt.xlabel('Epochs')
plt.ylabel('Loss')
plt.legend()
plt.title('Training and Validation Loss')
# 准确率曲线
plt.subplot(1, 2, 2)
plt.plot(history['train_acc'], label='Train Accuracy')
plt.plot(history['val_acc'], label='Validation Accuracy')
plt.xlabel('Epochs')
plt.ylabel('Accuracy')
plt.legend()
plt.title('Training and Validation Accuracy')
plt.tight_layout()
plt.savefig('training_history.png')
plt.show()整个流程
python
#======================
#6. 主函数
#======================
def main():
# 设置随机种子(确保可复现性)
torch.manual_seed(42)
np.random.seed(42)
# 检查设备
device = torch.device("cuda" if torch.cuda.is_available() else "cpu")
print(f"Using device: {device}")
# 创建数据增强管道
train_transform, val_transform = get_transforms()
# 创建数据集
train_dataset = CustomImageDataset(
root_dir='path/to/your/train_data', # 替换为你的训练数据路径
transform=train_transform
)
val_dataset = CustomImageDataset(
root_dir='path/to/your/val_data', # 替换为你的验证数据路径
transform=val_transform
)
# 创建数据加载器
train_loader = DataLoader(
train_dataset,
batch_size=32,
shuffle=True,
num_workers=4,
pin_memory=True
)
val_loader = DataLoader(
val_dataset,
batch_size=32,
shuffle=False,
num_workers=4,
pin_memory=True
)
dataloaders = {'train': train_loader, 'val': val_loader}
# 创建模型
num_classes = len(train_dataset.classes)
model = create_model(num_classes)
model = model.to(device)
# 定义损失函数和优化器
criterion = nn.CrossEntropyLoss()
optimizer = optim.Adam(model.parameters(), lr=0.001, weight_decay=1e-4)
scheduler = optim.lr_scheduler.StepLR(optimizer, step_size=7, gamma=0.1)
# 检查是否要恢复训练
resume_training = False
checkpoint_path = 'checkpoint.pth'
# 检查是否存在检查点文件
if os.path.exists(checkpoint_path):
print("Checkpoint file found. Do you want to resume training? (y/n)")
response = input().lower()
if response == 'y':
resume_training = True
# 开始训练
start_time = time.time()
model, history = train_model(
model=model,
dataloaders=dataloaders,
criterion=criterion,
optimizer=optimizer,
scheduler=scheduler,
device=device,
num_epochs=25,
checkpoint_path=checkpoint_path,
resume=resume_training
)
end_time = time.time()
# 保存训练历史
with open('training_history.json', 'w') as f:
json.dump(history, f, indent=4)
# 打印训练时间
training_time = end_time - start_time
print(f"Total training time: {training_time//3600}h {(training_time%3600)//60}m {training_time%60:.2f}s")
# 可视化训练历史
plot_history(history)
if __name__ == "__main__":
main()模型评估
python
#======================
#模型评估
#======================
def evaluate_model(model, dataloader, device):
model.eval()
correct = 0
total = 0
with torch.no_grad():
for inputs, labels in dataloader:
inputs, labels = inputs.to(device), labels.to(device)
outputs = model(inputs)
_, predicted = torch.max(outputs.data, 1)
total += labels.size(0)
correct += (predicted == labels).sum().item()
accuracy = 100 * correct / total
print(f'Test Accuracy: {accuracy:.2f}%')
return accuracy
test_dataset = CustomImageDataset('path/to/test_data', transform=val_transform)
test_loader = DataLoader(test_dataset, batch_size=32, shuffle=False)
evaluate_model(model, test_loader, device)高级功能扩展
混合精度训练
python
from torch.cuda.amp import autocast, GradScaler
#在训练函数中添加
scaler = GradScaler()
#修改训练循环
with autocast():
outputs = model(inputs)
loss = criterion(outputs, labels)
scaler.scale(loss).backward()
scaler.step(optimizer)
scaler.update()分布式训练
python
import torch.distributed as dist
from torch.nn.parallel import DistributedDataParallel as DDP
#初始化分布式环境
dist.init_process_group(backend='nccl')
local_rank = int(os.environ['LOCAL_RANK'])
torch.cuda.set_device(local_rank)
#包装模型
model = DDP(model.to(local_rank), device_ids=[local_rank])
#修改数据加载器
train_sampler = torch.utils.data.distributed.DistributedSampler(train_dataset)
train_loader = DataLoader(..., sampler=train_sampler)