1、Lidar测速的几种方案
直接法:通过FMCW回波的FFT变换,直接得出目标的速度,但是这里的速度是径向速度;这里的速率是每个Lidar点云直接的velocity measurement,是直接的测量值。
间接法:通过测量目标点云在两帧或者多帧之间的位移和时间的比值,计算出目标的速度;在实际的工程实现上,是需要先对Lidar的点云进行目标识别,完成目标的Tracking,在通过Tracking后的目标进行目标速度的估计,注意这里是velocity estimation,不是直接测量。
2、FMCW Lidar测速
多普勒效应:当目标与Lidar之间存在相对运动的,若Lidar发射信号的工作频率为𝑓0,则接收信号的频率为𝑓0 +𝑓𝑑, 𝑓𝑑为多普 勒频率。将这种由于目标相对辐射源的运动而导致回波信号频 率的变化称为多普勒效应。
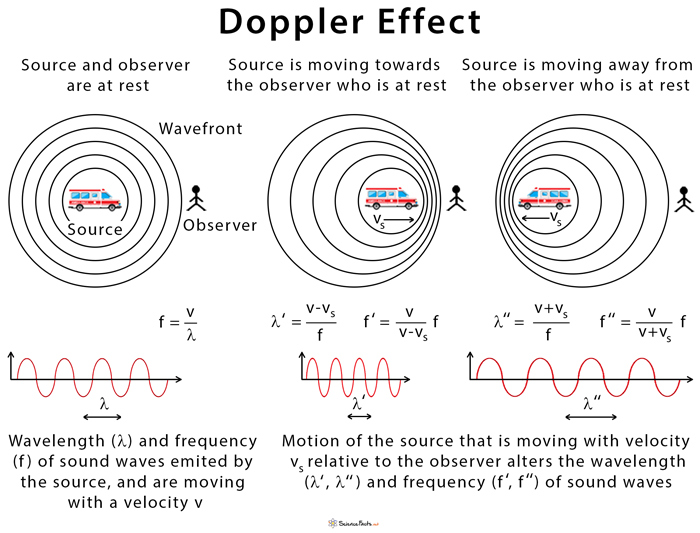 图1 Doppler Effert
图1 Doppler Effert
公式推导过程如下
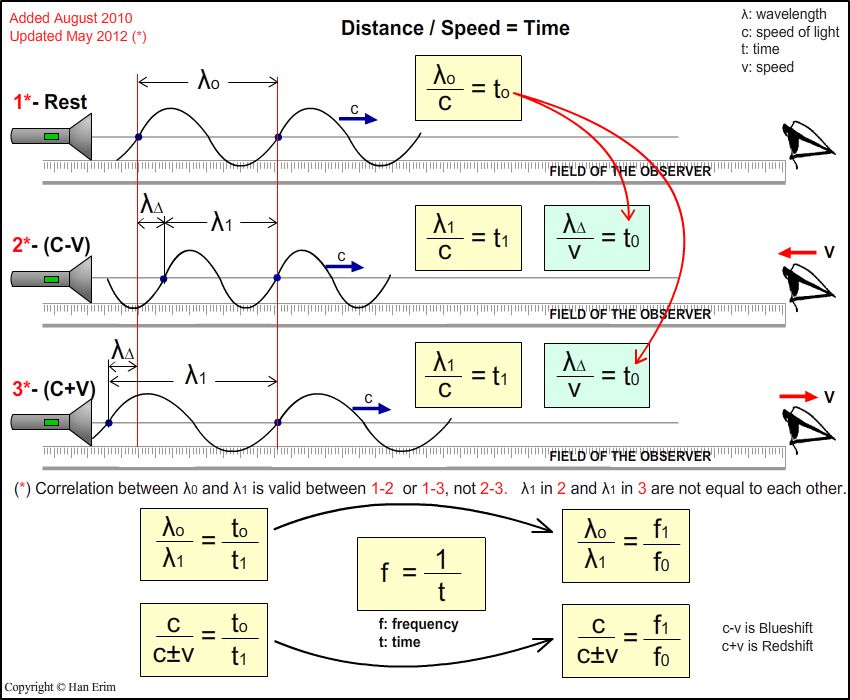 图2 多普勒推导过程
图2 多普勒推导过程
由上述公式推导过程可以得出,只有在两个不同的惯性系中才有可能发生多普勒效应。
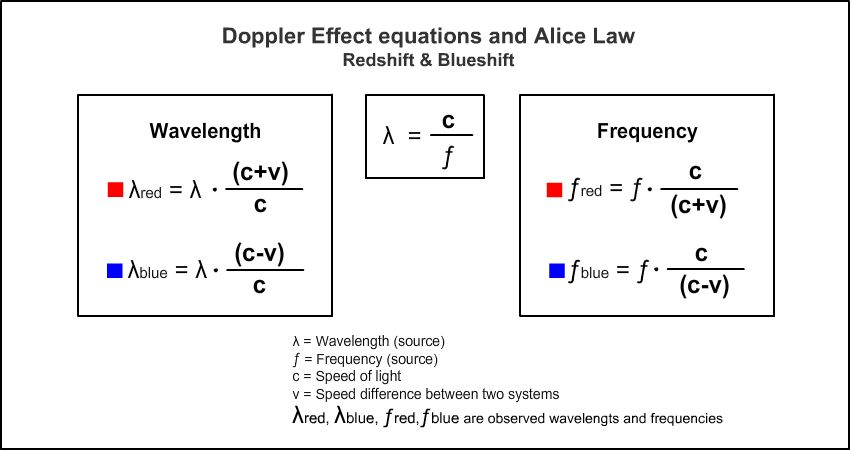 图3 多普勒公式总结
图3 多普勒公式总结
从上图可以看到,光速c为常数,由于多普勒效应,频率和波长成反比变化。通过测量这里的频率或者波长的变化,可以测量目标的想对速度。
利用多普勒效应,主动生成跳频连续被FMCW(chirp)如下所示
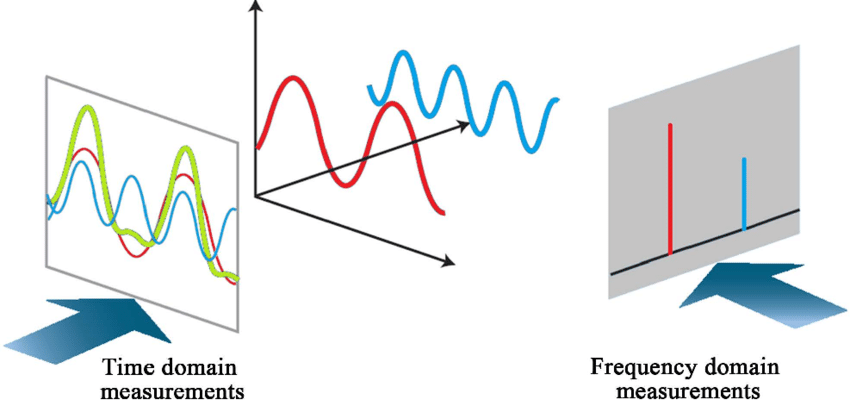 图4 时域和频域
图4 时域和频域
在时域上无法区分信号时(上图红色和蓝色叠加伪绿色),可以在频域进行区分(红色和蓝色)。
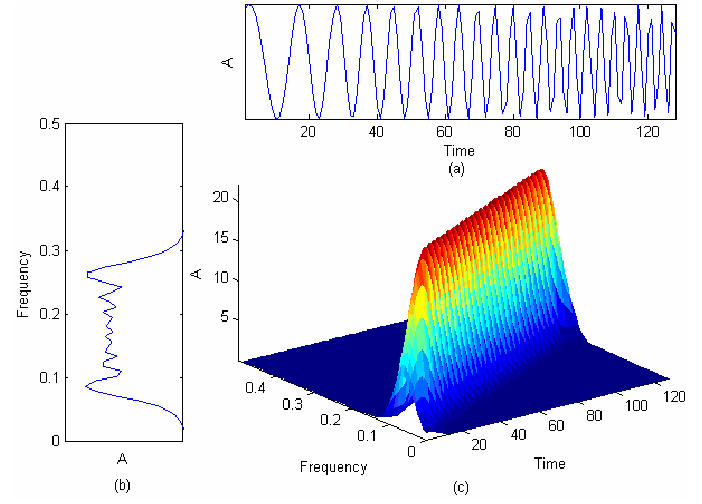 图5 Chirp信号(时域与频域)
图5 Chirp信号(时域与频域)
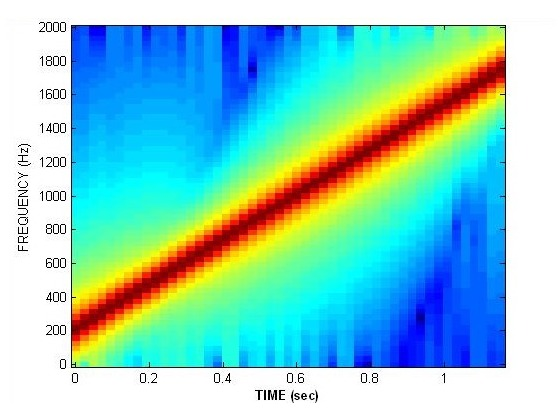 图6 Chirp信号(频率随时间变化)
图6 Chirp信号(频率随时间变化)
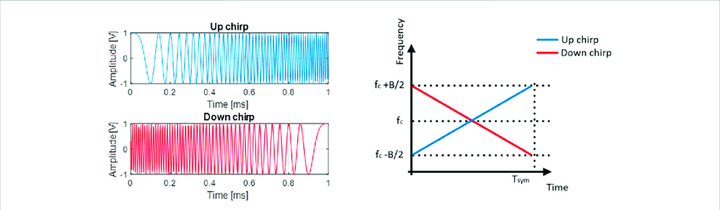 图7 Up Chirp和Down Chirp
图7 Up Chirp和Down Chirp
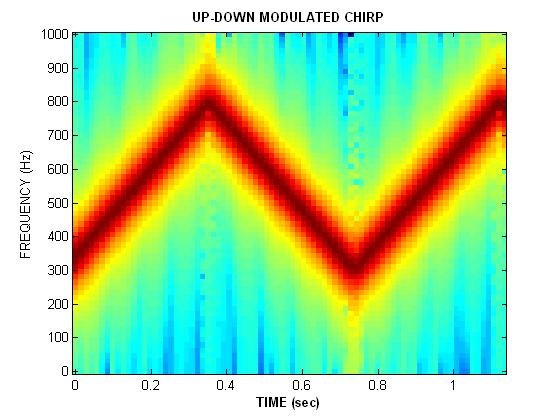 图8 Up Down Chirp
图8 Up Down Chirp
有了FMCW之后,通过TX发射chirp信号(下图中的红色信号),目标物发射chirp信号(下图中的蓝色信号)。如果没有相对运动,则TX RX频差固定,通过这个频差,可以测量出相对距离。
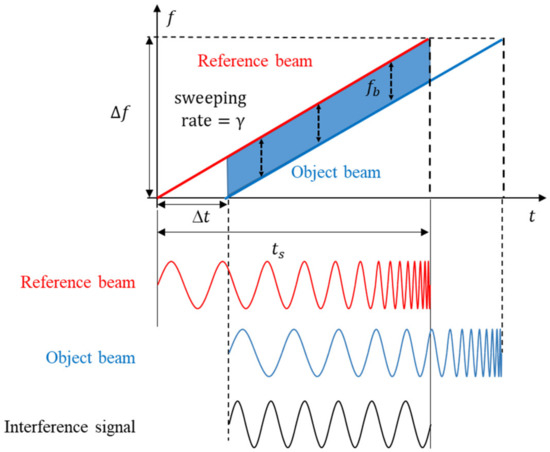 图9 TX RX Chirp
图9 TX RX Chirp
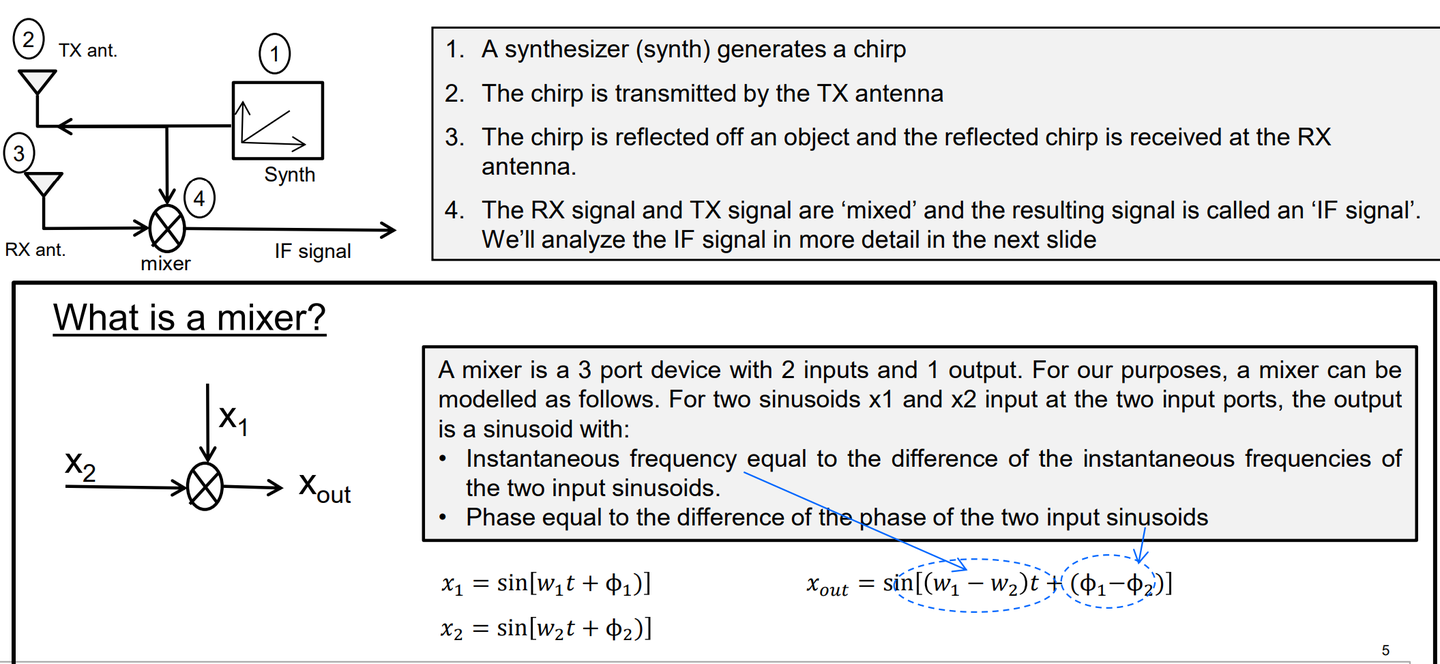 图10 TX RX Chirp 混频
图10 TX RX Chirp 混频
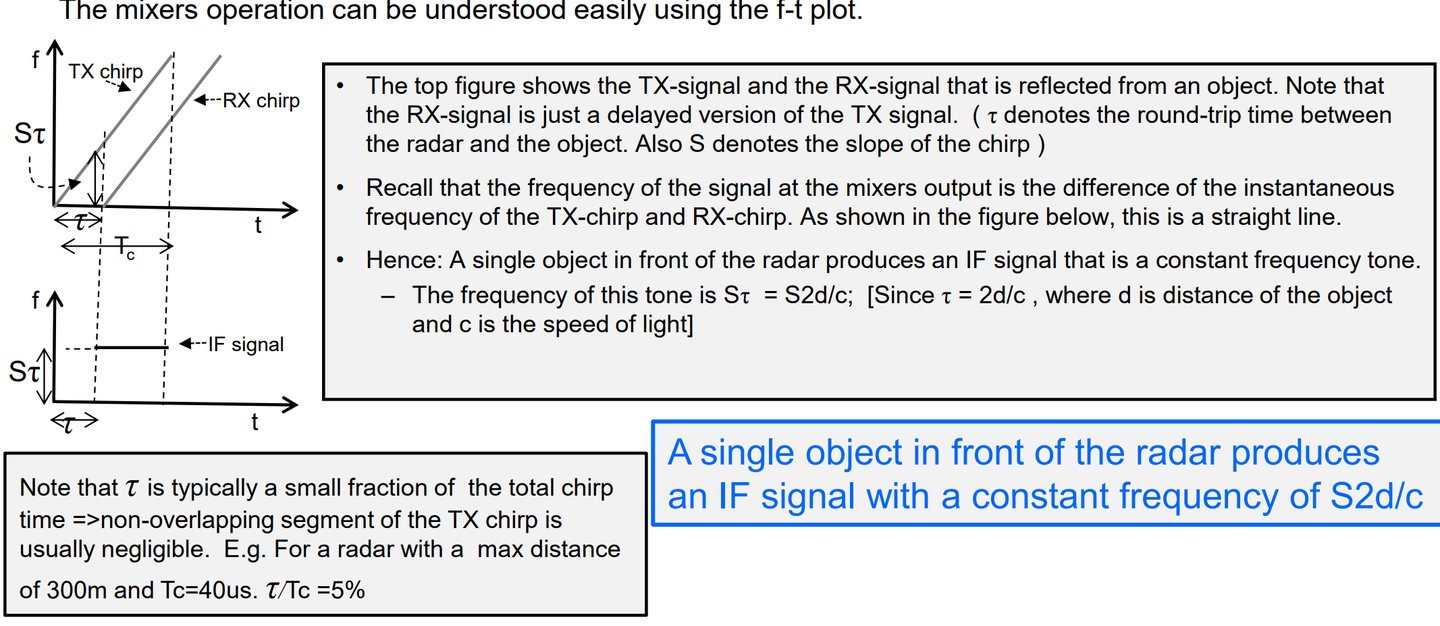 图11 TX RX Chirp 混频
图11 TX RX Chirp 混频
线性调频的调频速率定义如下
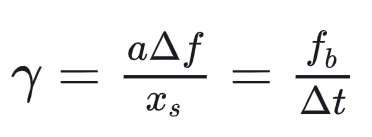
Lidar和目标之间的距离如下
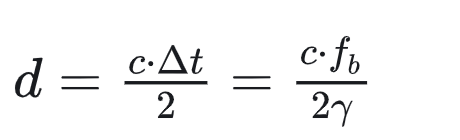
从上可以看到,距离d可以通过混频后的频率差fb得到,而不是△t;另外距离分辨率可以从下式得到
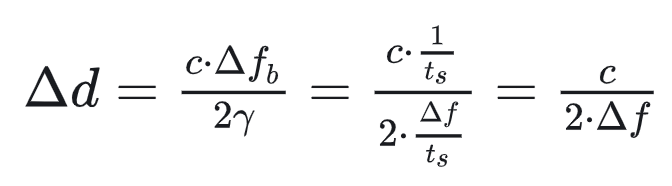
距离分辨率
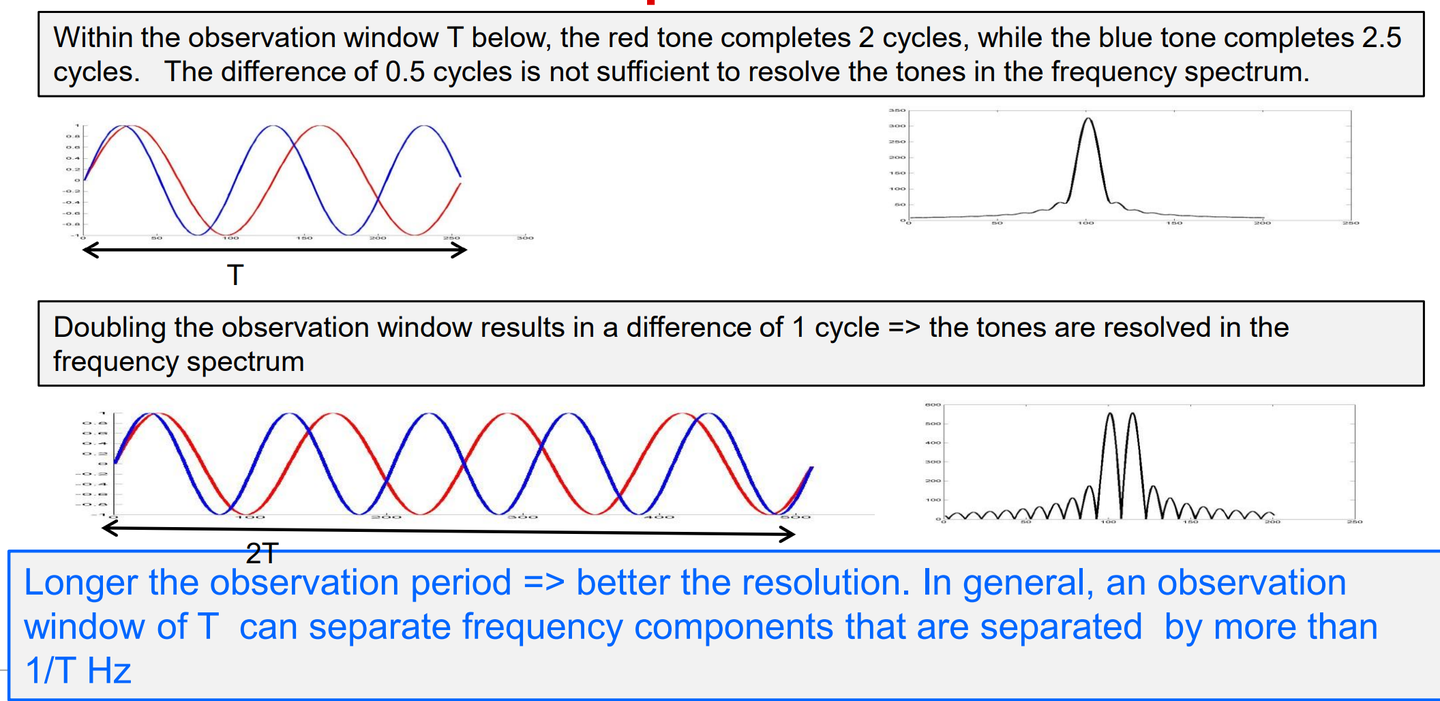 图12 距离分辨率和扫频带宽(扫频时间X扫频速度)相关
图12 距离分辨率和扫频带宽(扫频时间X扫频速度)相关
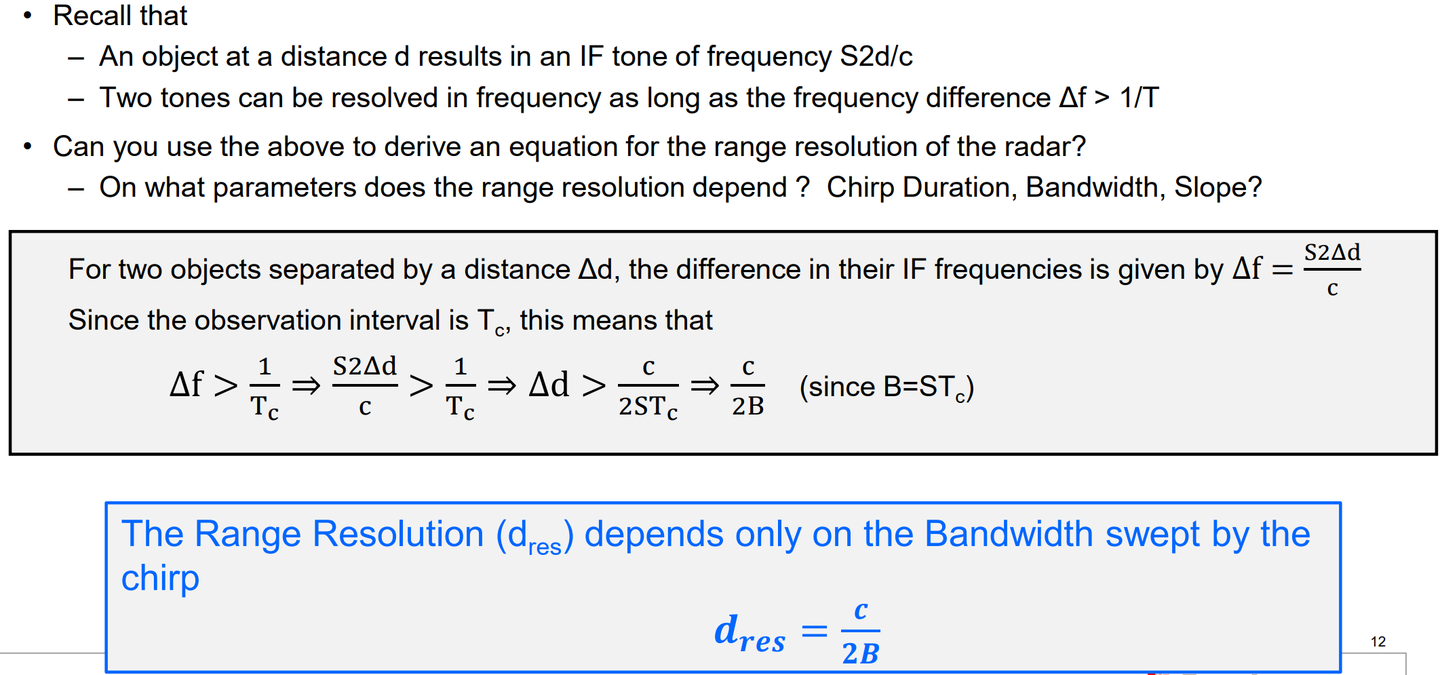 图13 距离分辨率和扫频带宽(扫频时间X扫频速度)相关
图13 距离分辨率和扫频带宽(扫频时间X扫频速度)相关
最大探测距离
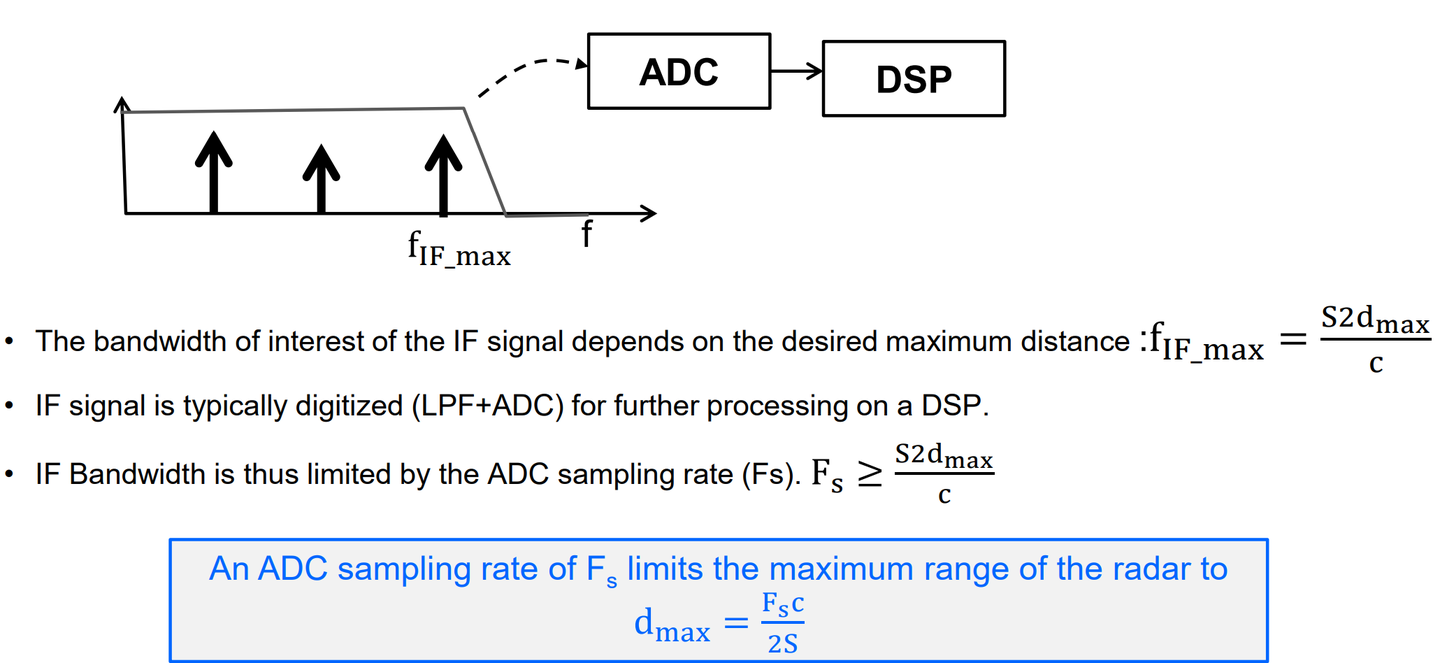 图14 ADC采样频率限制了最大探测距离
图14 ADC采样频率限制了最大探测距离
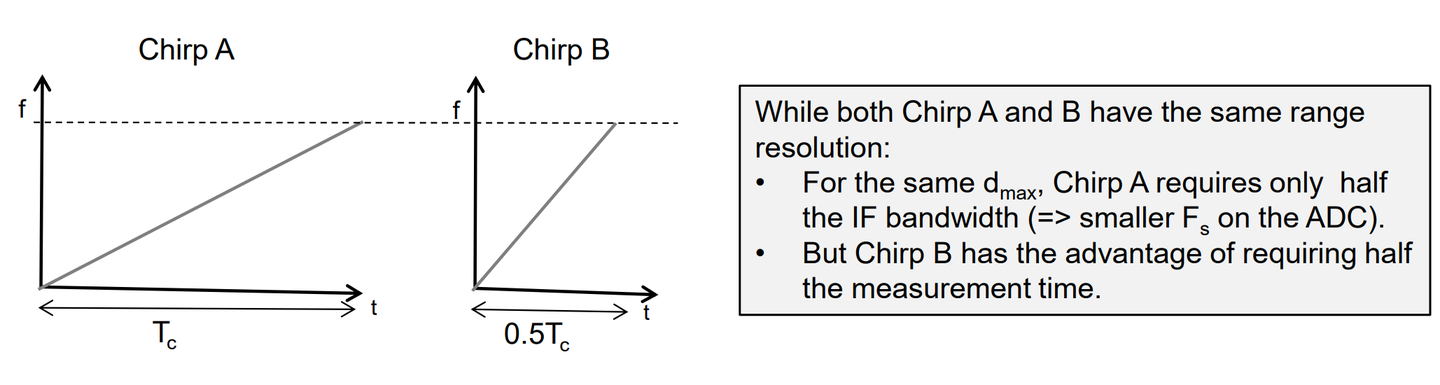 图15 ADC采样频率限制了最大探测距离
图15 ADC采样频率限制了最大探测距离
当目标存在相对速度时,这个速度在中频信号上,只能影响中频信号的相位变化,通过对IF相位变化的处理,可以得到目标的相对速度。
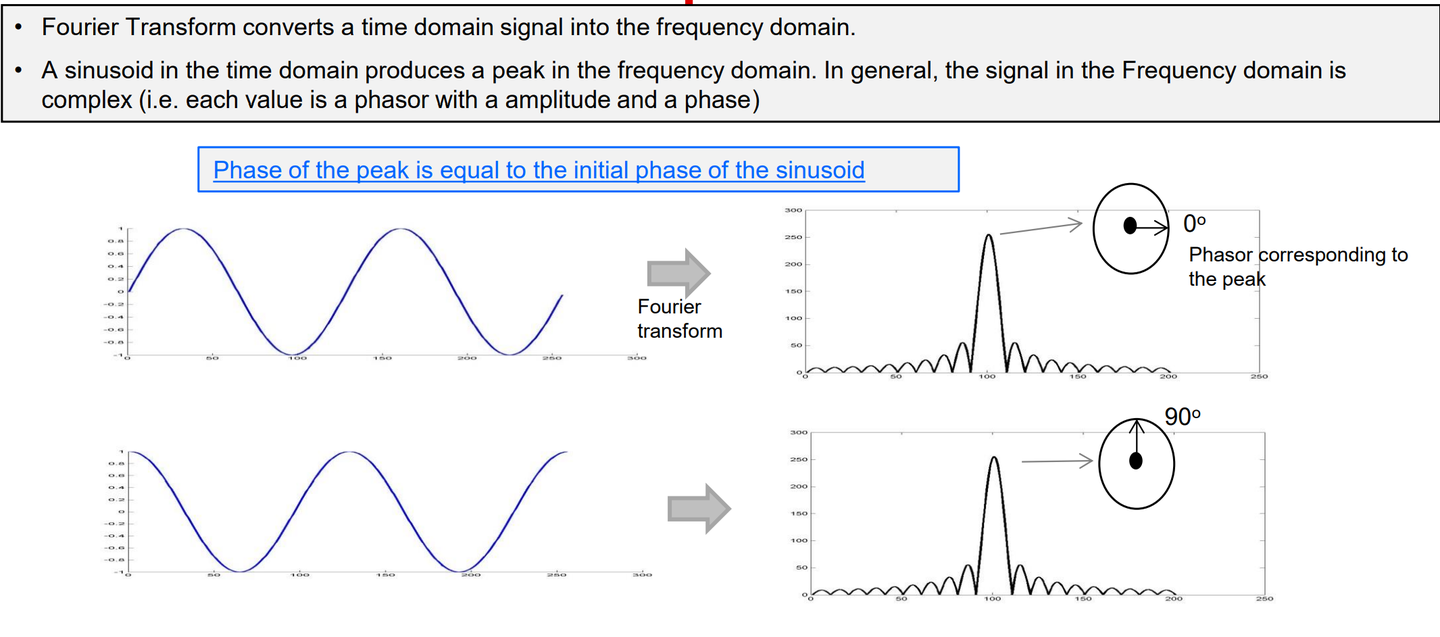 图16 中频信号的相位信息
图16 中频信号的相位信息
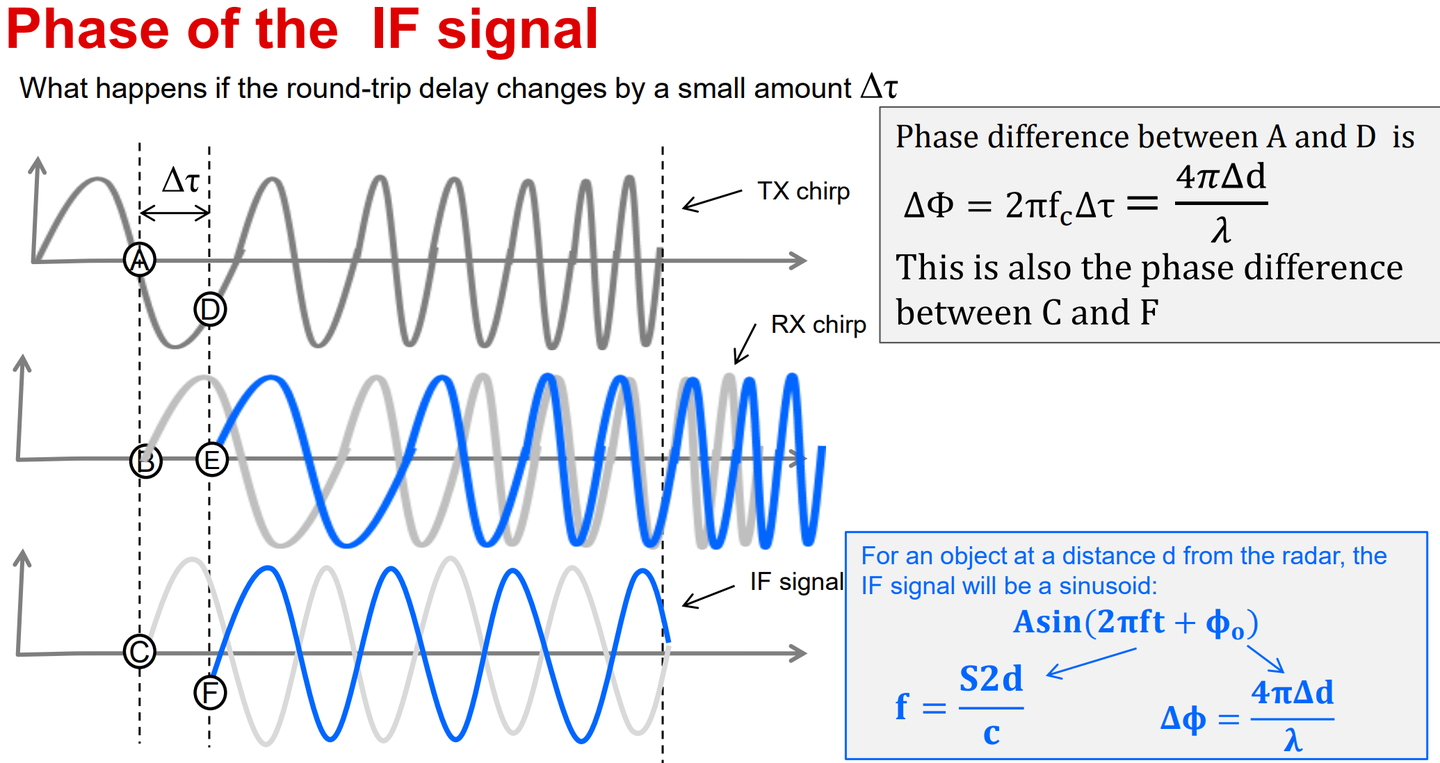 图17 中频信号的相位信息
图17 中频信号的相位信息
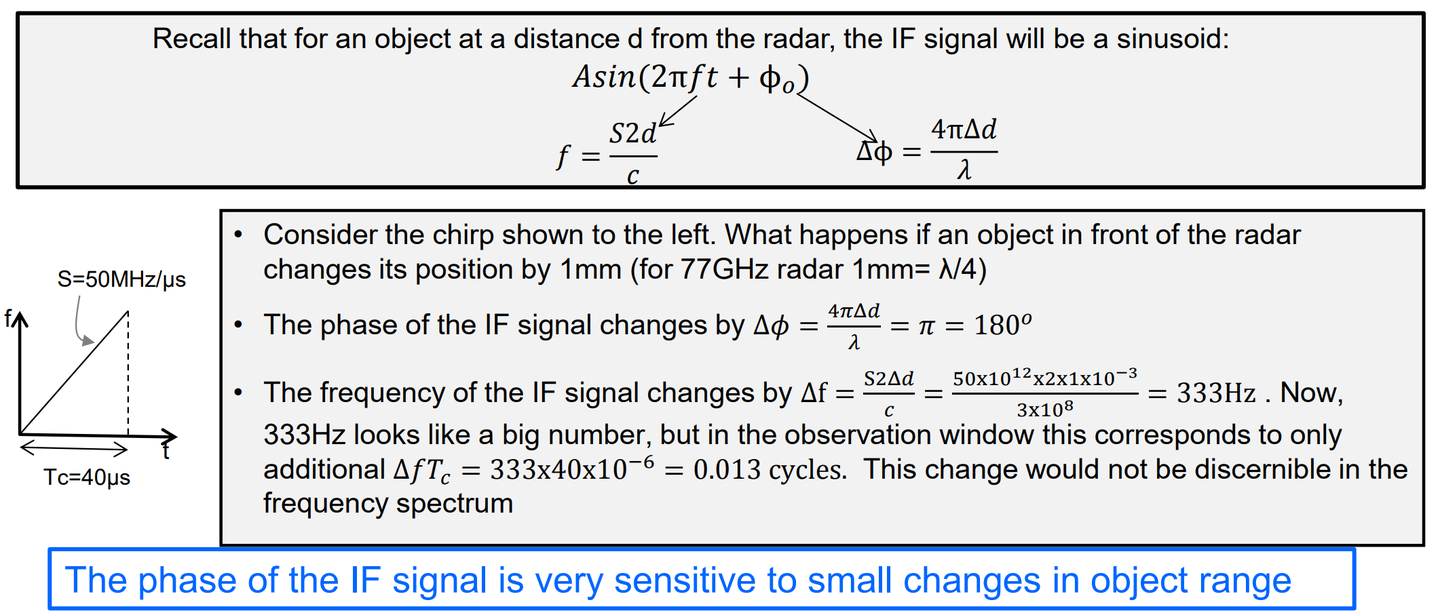 图18 中频信号的相位信息
图18 中频信号的相位信息
重复这些chirp,如下图
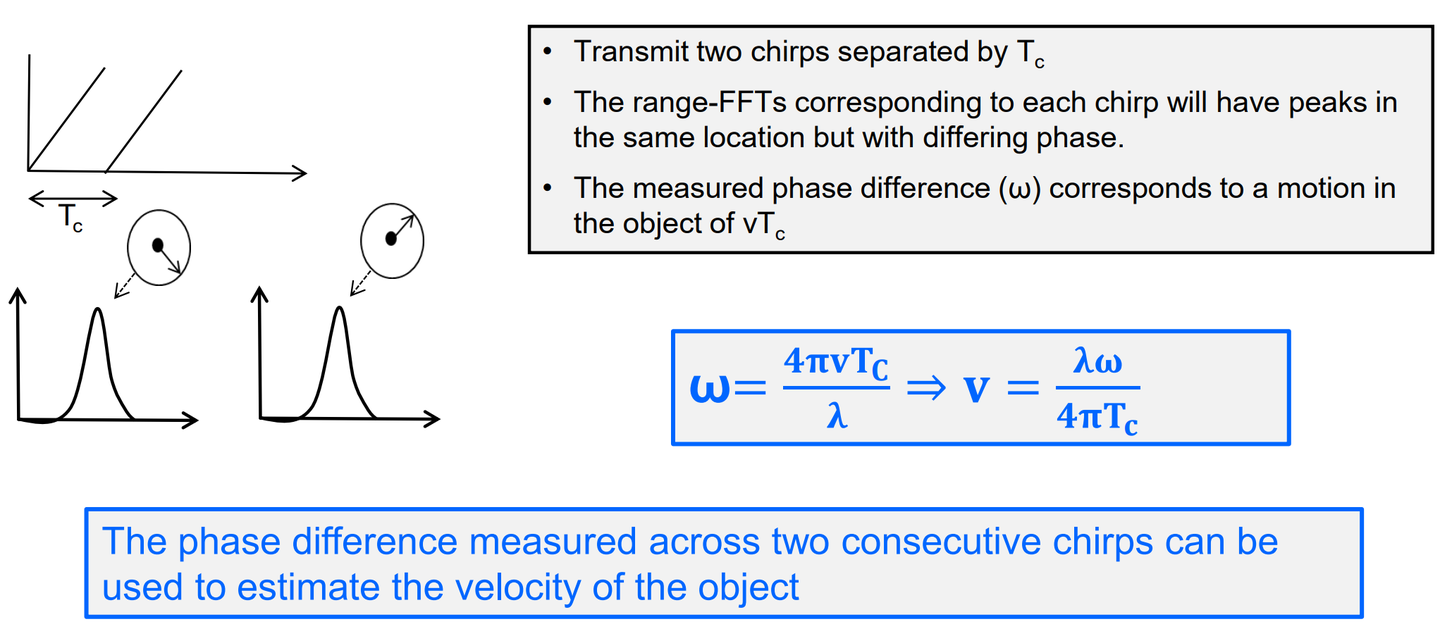 图19 中频信号的相位信息
图19 中频信号的相位信息
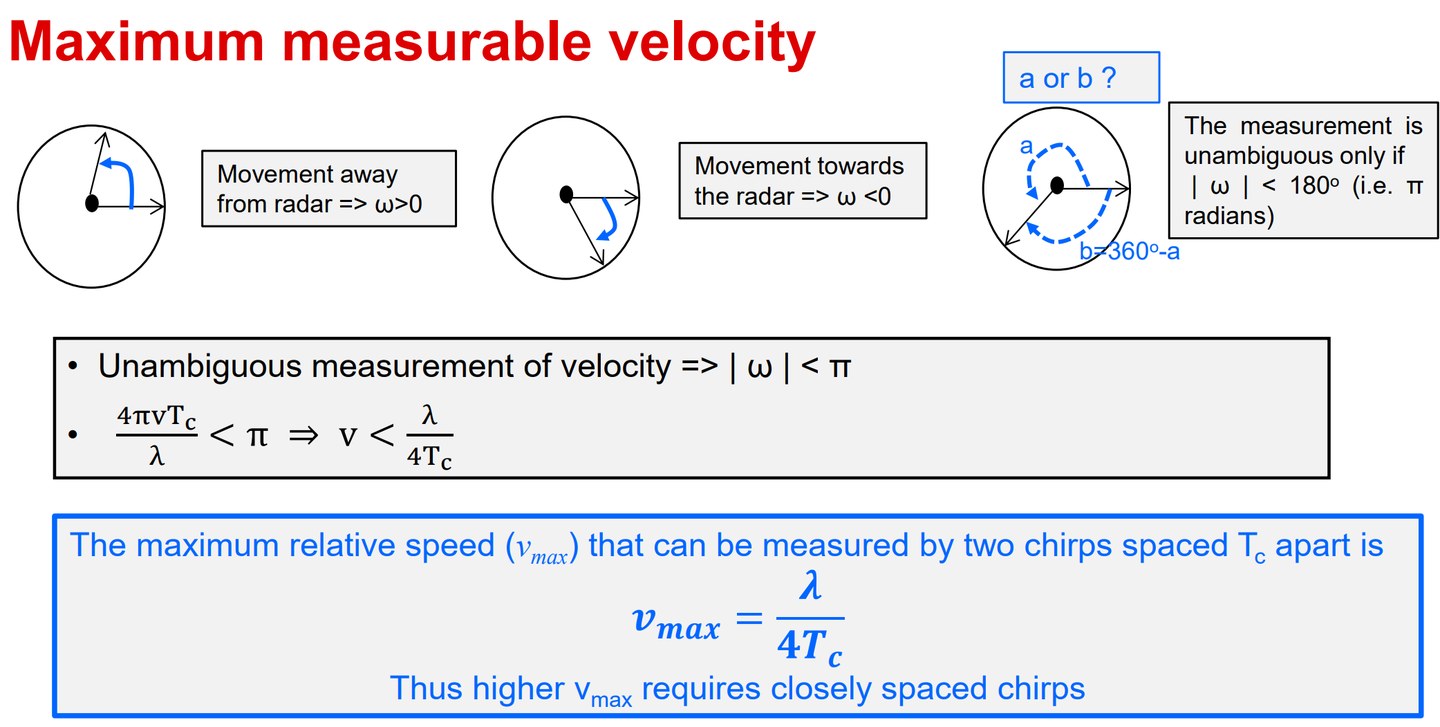 图20 最大可测量速度
图20 最大可测量速度
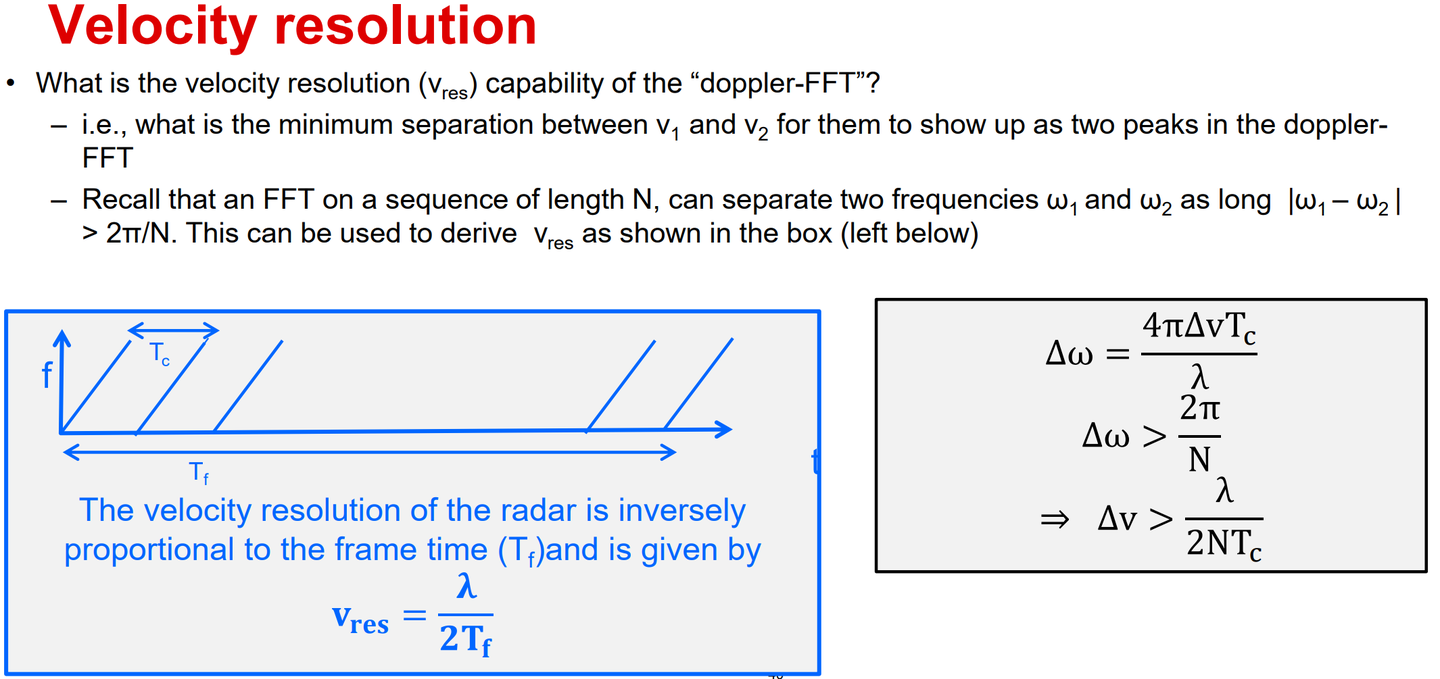 图21 速度分辨率
图21 速度分辨率
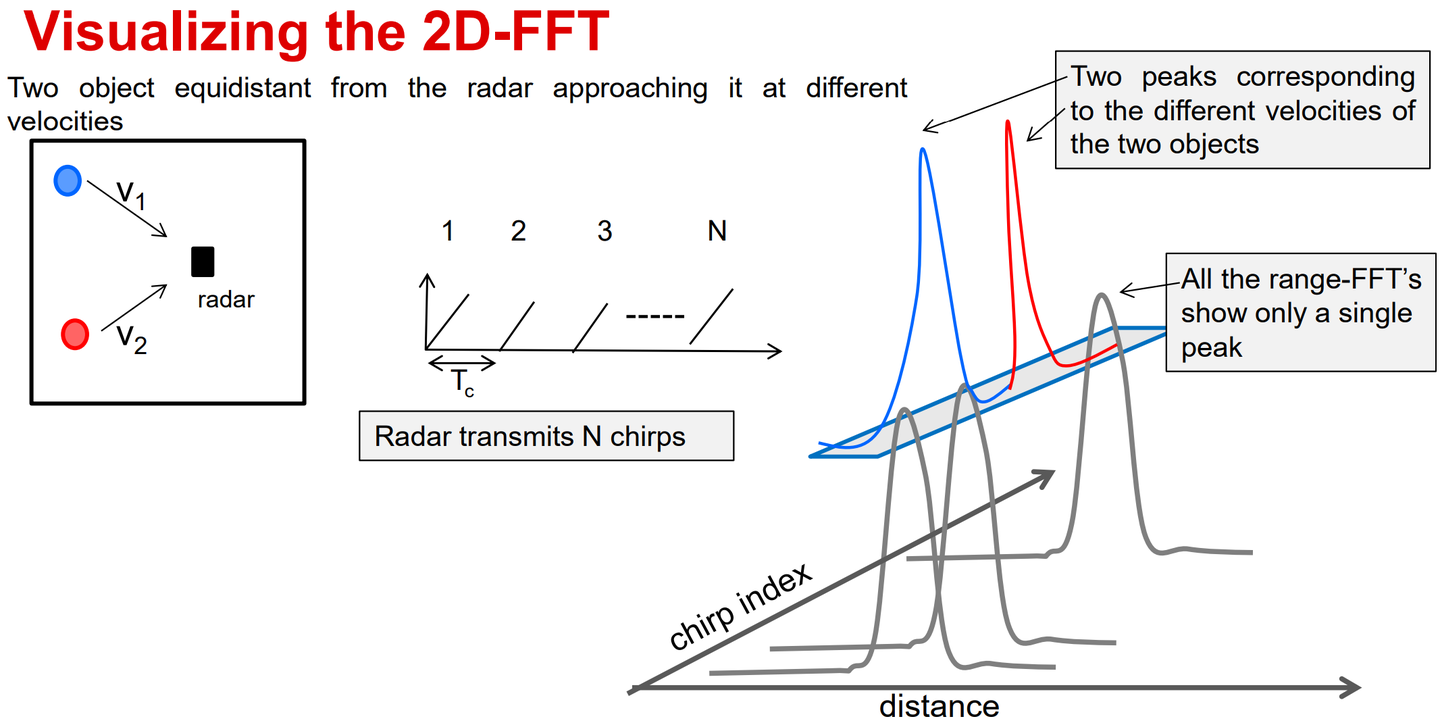 图22 距离和速度的组合测量
图22 距离和速度的组合测量
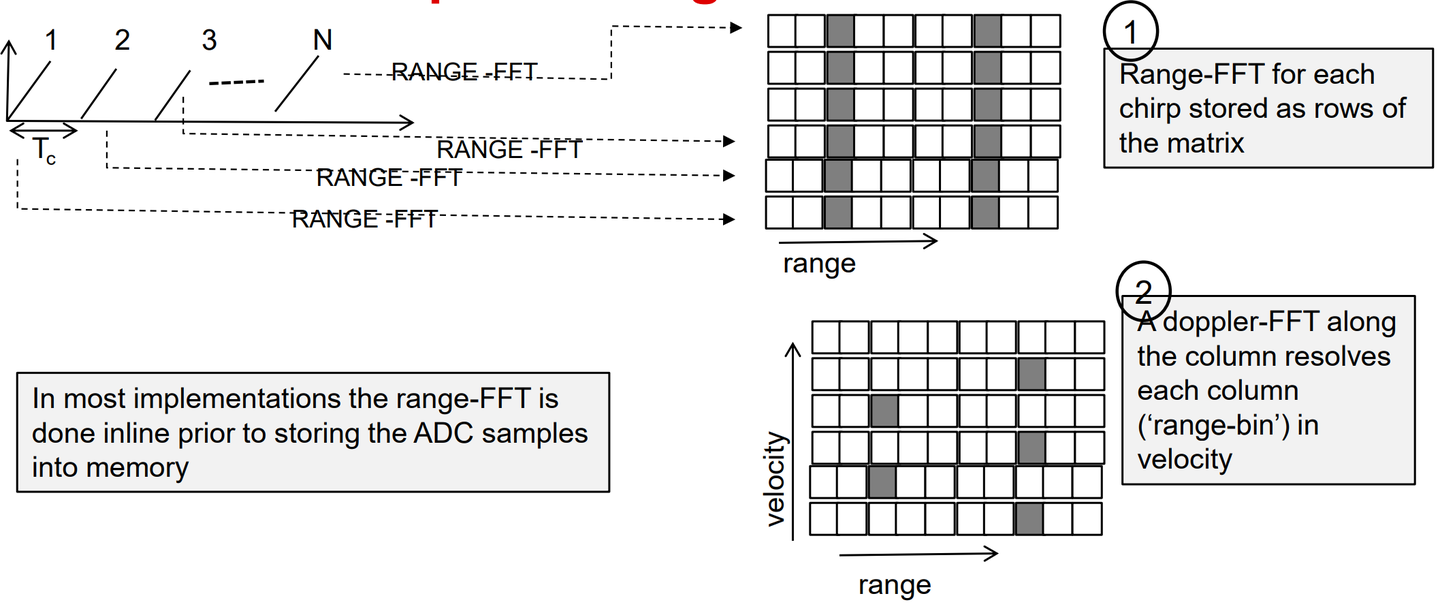 图23 距离和速度的组合测量
图23 距离和速度的组合测量
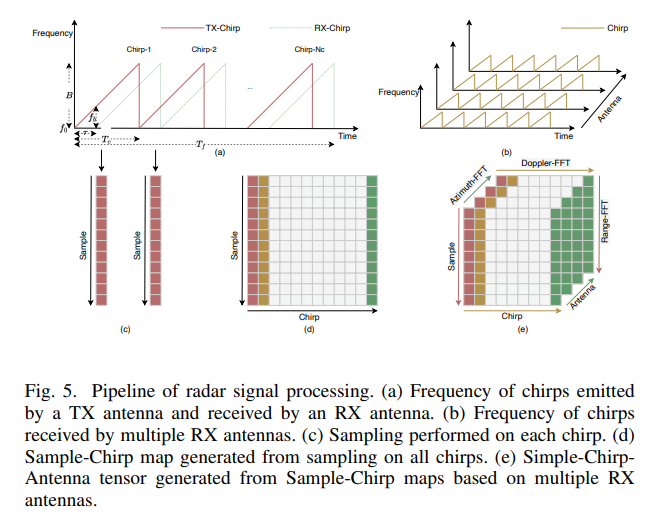 图24 数据Cubic,注意Lidar中目前没有多天线的方位向数据采集
图24 数据Cubic,注意Lidar中目前没有多天线的方位向数据采集
3、间接速度测量
间接速度测量和卡尔曼滤波算法强相关,需要介绍一个kalman滤波算法
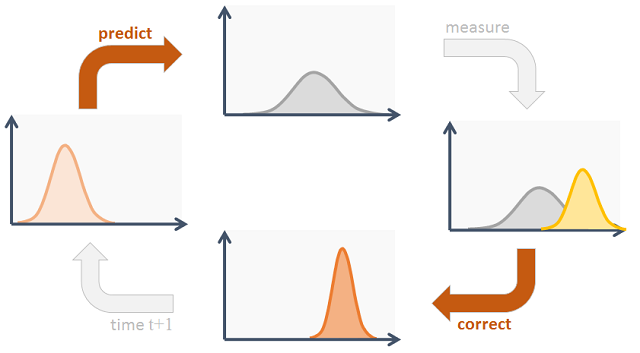 图25 Kalman Filter流程
图25 Kalman Filter流程
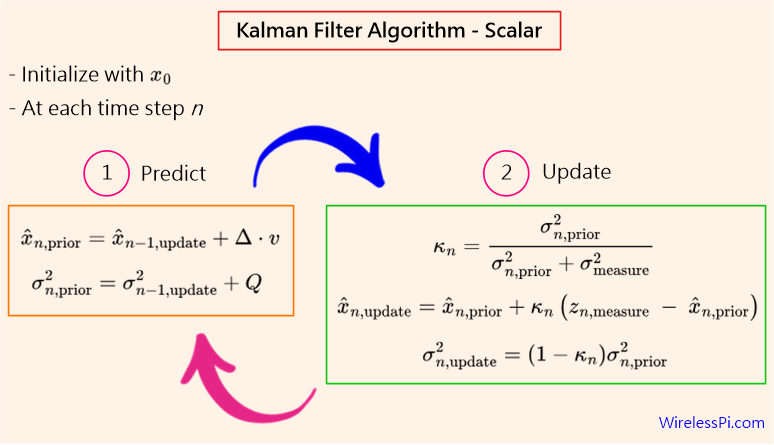 图26 Kalman Filter流程
图26 Kalman Filter流程
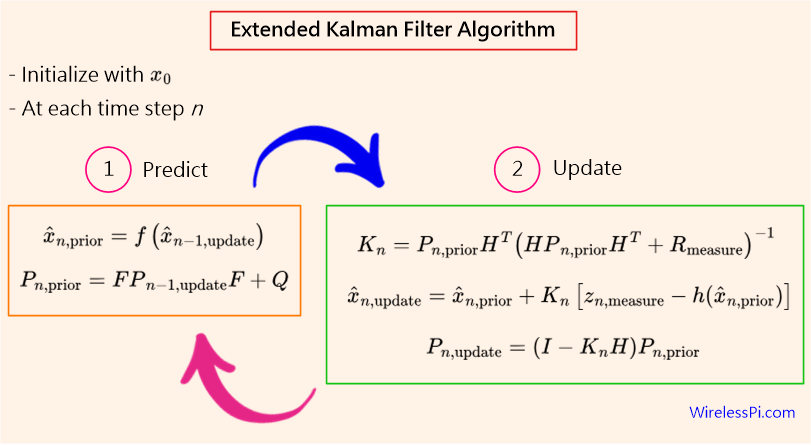 图27 Extended Kalman Filter流程
图27 Extended Kalman Filter流程
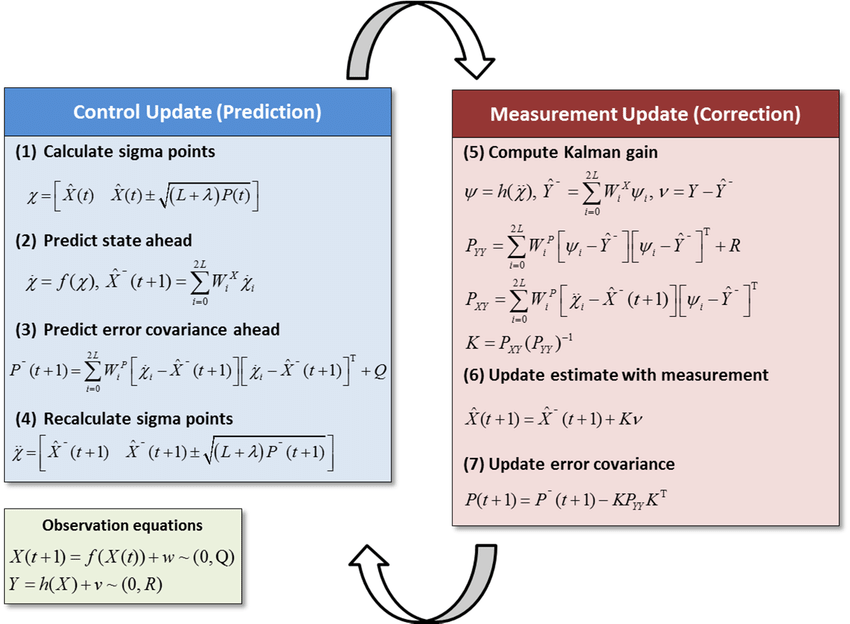 图28 Unscented Kalman Filter流程
图28 Unscented Kalman Filter流程
Ref:Object Tracking: Kalman Filter with Ease - CodeProject
和Kalman 滤波相关的还有运动学模型,影响Kalman滤波中的运动状态更新公式的选取。
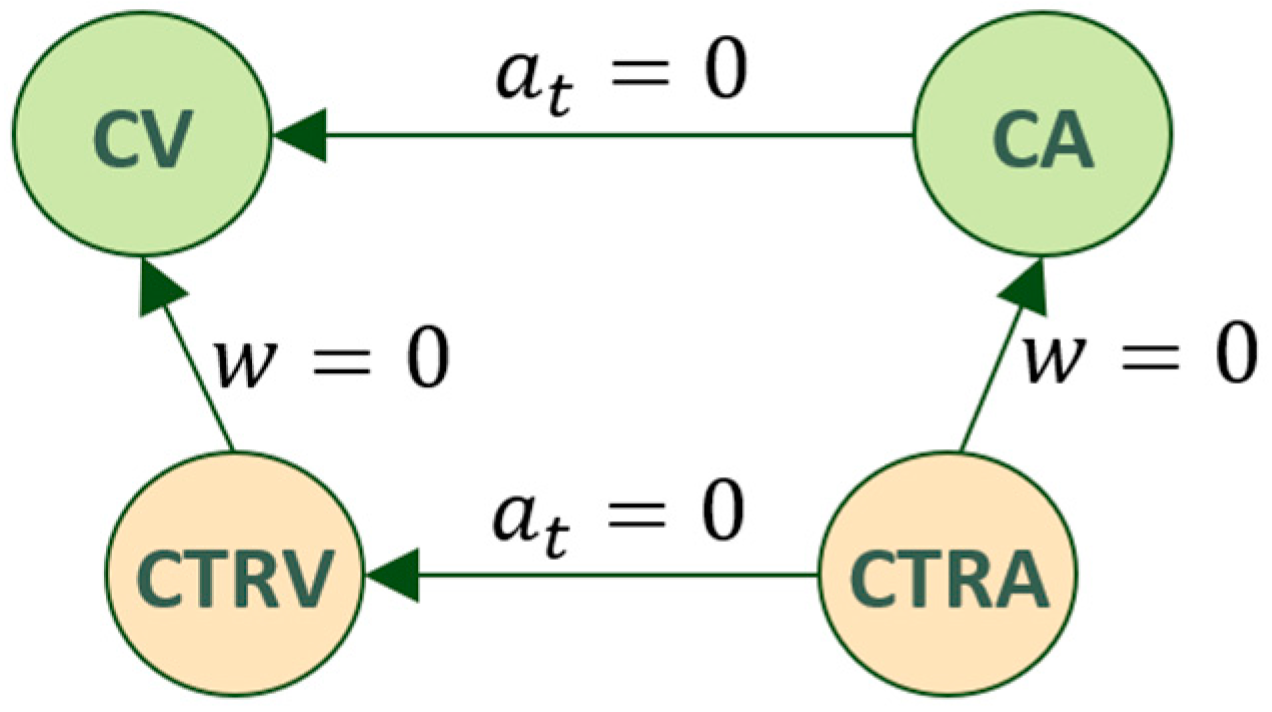 图29 运动模型
图29 运动模型
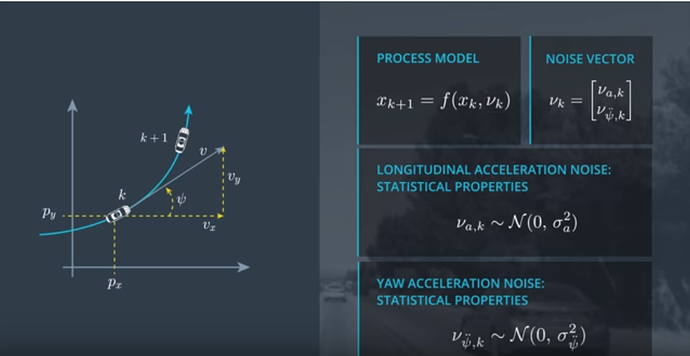 图30 CTRV模型
图30 CTRV模型
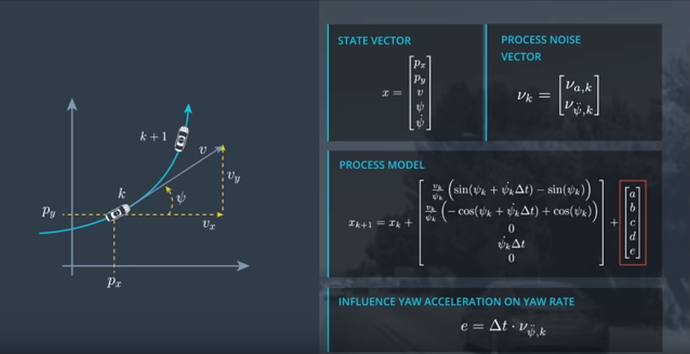 图31 CTRV模型
图31 CTRV模型
Ref:https://www.mdpi.com/1424-8220/22/15/5828
基于以上的,可以通过Lidar点云,识别得到运动目标,再对运动目标进行Kalman滤波,从而估计出运动目标的速度。
https://patents.google.com/patent/CN103901425A/zh
基于扩展卡尔曼滤波的横向速度估计
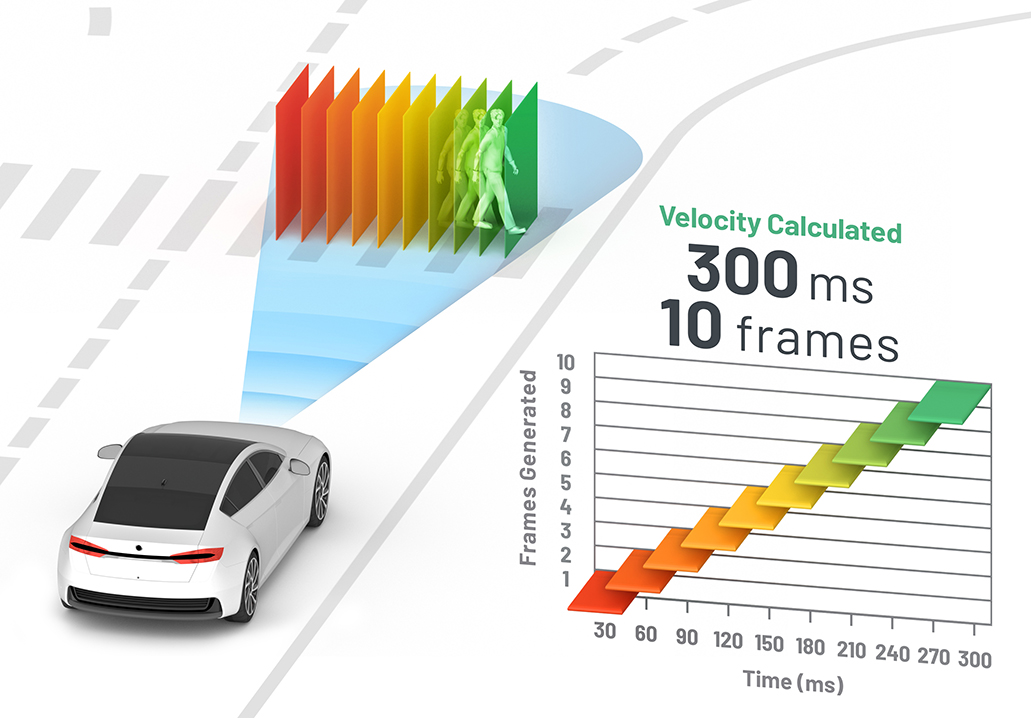 图32 目标横向速度估计
图32 目标横向速度估计
 图33 目标横向速度估计
图33 目标横向速度估计
https://www.mdpi.com/1424-8220/24/23/7718
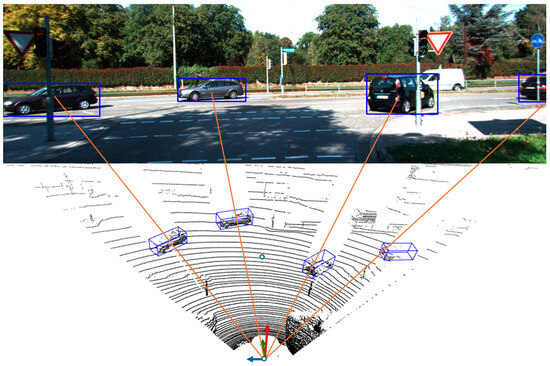 图34 Inputs to our fusion tracking approach, where 3D detections from the LiDAR point-cloud are shown in the lower half of the image, and the camera 2D detections are shown in the upper half.
图34 Inputs to our fusion tracking approach, where 3D detections from the LiDAR point-cloud are shown in the lower half of the image, and the camera 2D detections are shown in the upper half.
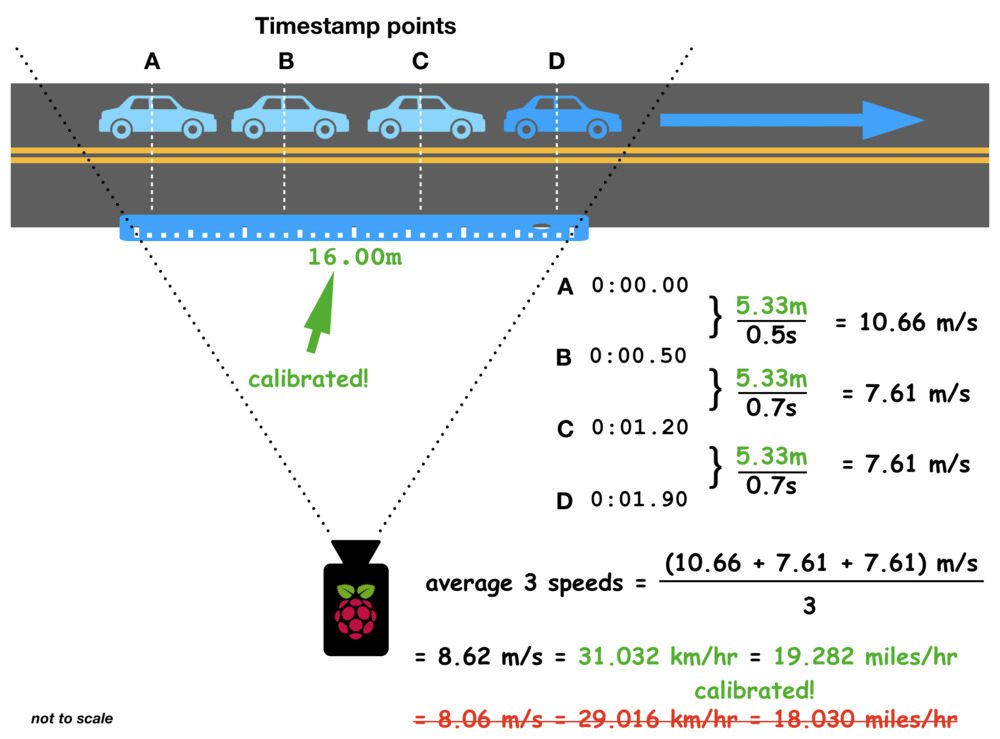 图35 目标速度简易测量
图35 目标速度简易测量
OpenCV Vehicle Detection, Tracking, and Speed Estimation - PyImageSearch
上图的方法,实际上是无法在实际的ADAS项目中应用的。
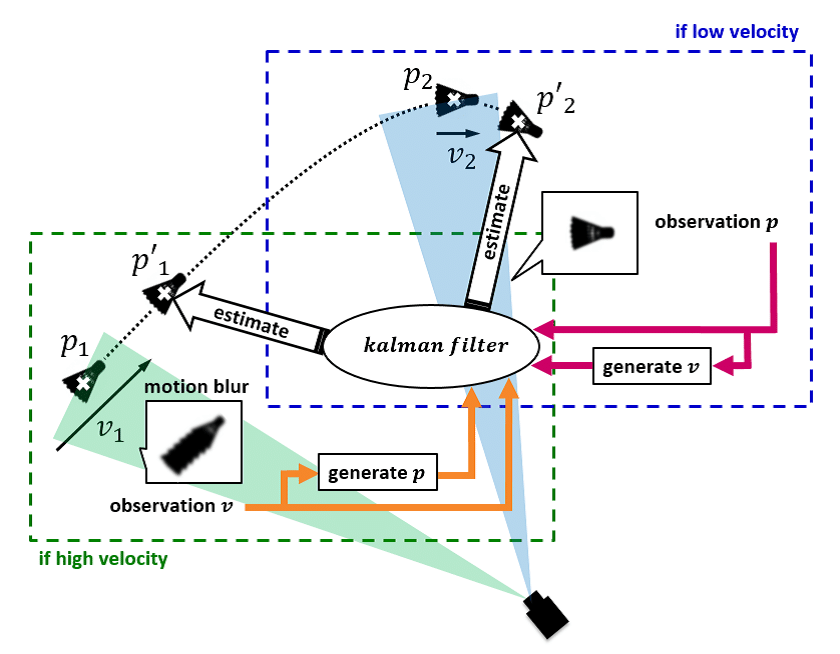 图36 Kalman Filter得到目标的位置和速度
图36 Kalman Filter得到目标的位置和速度
ResearchGate - Temporarily Unavailable
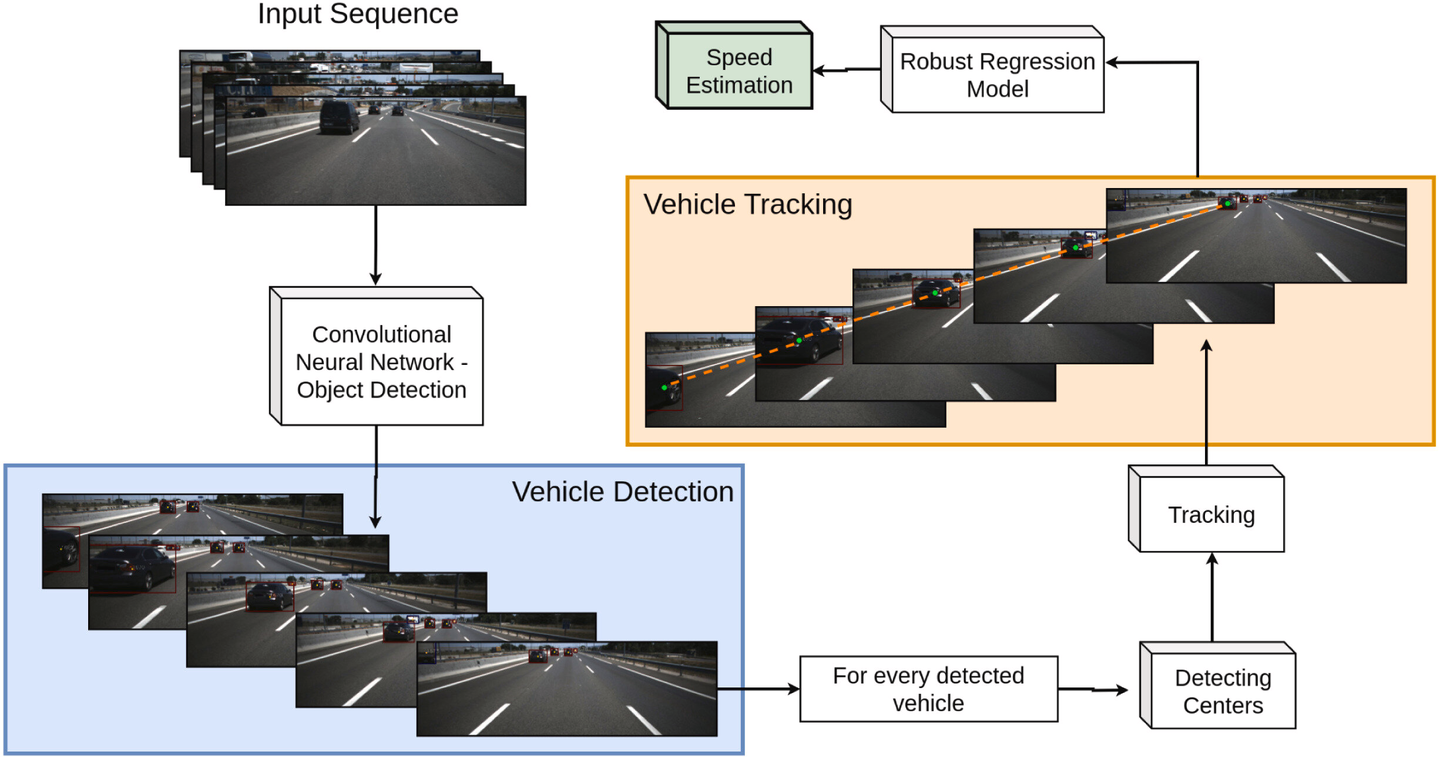 图37 Kalman Filter得到目标的位置和速度
图37 Kalman Filter得到目标的位置和速度
https://techxplore.com/news/2023-12-vision-vehicles-road-real-time.html
How to Estimate Speed with Computer Vision
How to Estimate Speed with lidar point
https://www.mdpi.com/1424-8220/23/23/9426
https://www.mathworks.com/help/fusion/ug/track-vehicles-using-lidar.html
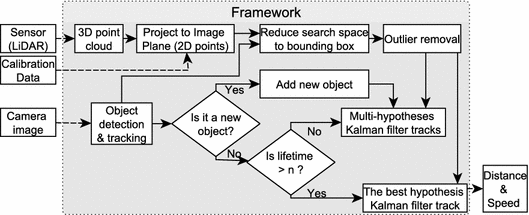 图38 Lidar点云和camera图像对目标进行联合估计
图38 Lidar点云和camera图像对目标进行联合估计
Target Position and Speed Estimation Using LiDAR | SpringerLink
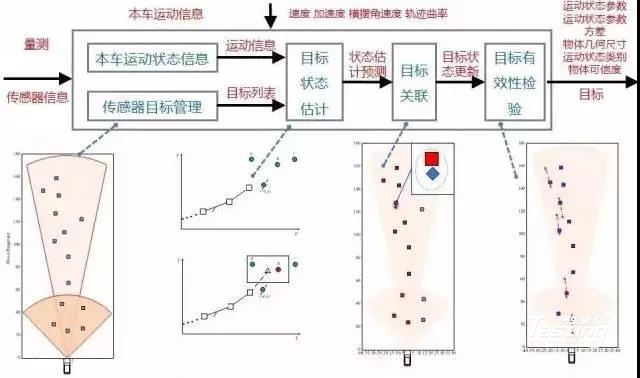 图39 目标状态估计
图39 目标状态估计