不确定环境下AI Agent的贝叶斯信念更新策略研究
引言
在人工智能(AI)系统中,面对不确定性环境时,传统的确定性策略往往表现不佳。Bayesian推理 提供了一种系统化的方法来量化不确定性,使得AI Agent能够在信息不完全或存在噪声的情况下做出合理的决策。本篇文章将介绍Bayesian推理在AI Agent中的应用原理,并结合Python代码演示如何实现不确定性建模与决策。 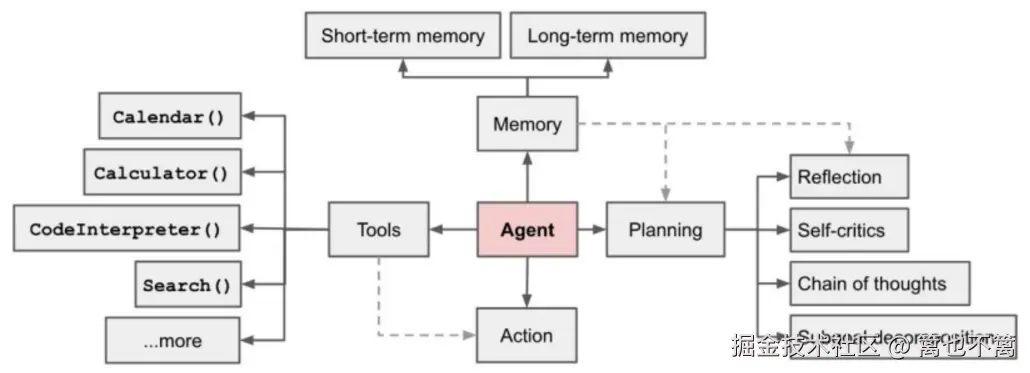
Bayesian推理基础
概率与不确定性
在现实世界中,AI Agent面临的数据往往带有噪声或不完整。例如,传感器可能提供错误信息,环境状态可能无法直接观测。Bayesian方法通过概率来表达不确定性,使Agent能够根据观测数据更新对环境的信念(Belief)。
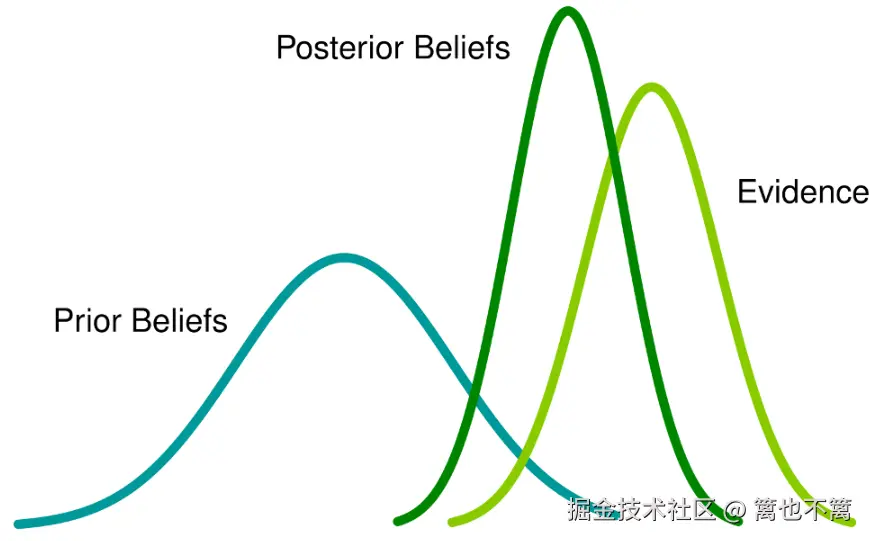
贝叶斯公式
贝叶斯公式是核心公式:
P(H∣D)=P(D)P(D∣H)⋅P(H)
- H:假设(Hypothesis),如环境状态或目标位置
- D:观测数据(Data)
- P(H∣D):后验概率(Posterior)
- P(H):先验概率(Prior)
- P(D∣H):似然函数(Likelihood)
AI Agent可以利用后验概率来更新对环境的信念,从而在不确定环境中做出决策。
AI Agent中的不确定性建模
贝叶斯网络(Bayesian Network)
贝叶斯网络是一种有向无环图(DAG),用于表示随机变量及其条件依赖关系。它能够捕捉环境变量之间的概率关系,便于Agent进行推理。
示意图:
rust
天气 --> 出行决策 --> 到达时间置信更新(Belief Update)
当Agent获得新观测时,可以通过Bayesian更新信念。例如,在迷宫导航中,Agent通过传感器测量周围墙壁位置,从而更新自己在迷宫中的位置概率分布。
决策策略
最大后验决策(MAP)
MAP策略选择后验概率最大的假设作为决策:
a∗=argamaxP(H∣D)
这种策略简单高效,但可能忽略不确定性分布的整体特征。
贝叶斯风险最小化
在决策过程中,可以引入损失函数 L(a,H),选择期望损失最小的动作:
a∗=argaminH∑L(a,H)⋅P(H∣D)
这种方法能够综合考虑不确定性,避免极端决策。
实战代码示例
下面用Python演示一个基于Bayesian推理的AI Agent在简单环境中的决策。假设Agent需要在三个房间中寻找宝藏,且观测传感器存在噪声。
python
import numpy as np
# 房间先验概率
priors = np.array([0.3, 0.5, 0.2])
# 观测似然矩阵 (观测为宝藏的概率)
# 行:观测结果,列:真实房间
likelihood = np.array([
[0.9, 0.2, 0.1], # 观测到宝藏
[0.1, 0.8, 0.2] # 没观测到宝藏
])
# 观测结果 (0: 宝藏, 1: 没有宝藏)
observation = 0
# 贝叶斯更新
posterior_numerator = likelihood[observation] * priors
posterior = posterior_numerator / posterior_numerator.sum()
print("后验概率分布:", posterior)
# MAP 决策
decision = np.argmax(posterior)
print("Agent选择搜索的房间:", decision + 1)代码说明
priors表示Agent对宝藏分布的初始信念。likelihood表示观测传感器在不同房间下的概率。- 通过贝叶斯公式更新后验概率。
- 最后,使用MAP策略选择最可能有宝藏的房间进行搜索。
输出示例
makefile
后验概率分布: [0.4737 0.4211 0.1053]
Agent选择搜索的房间: 1从结果可以看出,Agent将优先选择房间1进行搜索,即使房间2的先验更高,也因为观测信息使得房间1的后验概率最大。
拓展应用
- 机器人导航:通过贝叶斯滤波(如Kalman Filter、Particle Filter)在噪声环境中定位。
- 推荐系统:利用贝叶斯模型对用户兴趣进行动态更新和预测。
- 医疗诊断:根据症状和测试结果更新疾病概率,实现辅助决策。
连续状态空间中的贝叶斯推理
在实际环境中,Agent通常面对连续状态空间(如位置、速度、角度等),而不是离散的房间或类别。在这种情况下,贝叶斯更新公式可以用概率密度函数(PDF)表示:
p(xt∣z1:t)=p(zt∣z1:t−1)p(zt∣xt)∫p(xt∣xt−1)p(xt−1∣z1:t−1)dxt−1
- xt:当前状态
- zt:观测
- p(xt∣xt−1):状态转移模型
- p(zt∣xt):观测模型
- p(xt∣z1:t):后验分布
这种连续贝叶斯更新在机器人定位、无人车导航中非常重要。 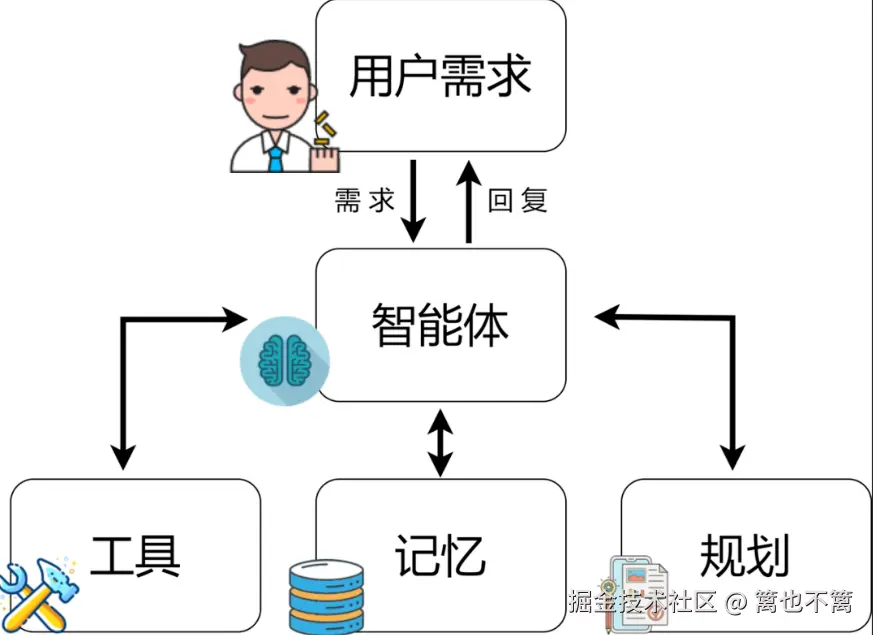
Kalman滤波(Kalman Filter)
Kalman滤波假设系统线性且噪声为高斯分布,是连续状态下最经典的贝叶斯推理方法。主要步骤:
- 预测:利用状态转移模型预测下一个状态
- 更新:结合观测更新状态估计和不确定性
Kalman滤波示例
python
import numpy as np
# 初始状态
x = np.array([0.0]) # 初始位置
P = np.array([[1.0]]) # 初始协方差
# 状态转移和观测模型
A = np.array([[1.0]]) # 状态转移矩阵
Q = np.array([[0.1]]) # 过程噪声协方差
H = np.array([[1.0]]) # 观测矩阵
R = np.array([[0.2]]) # 观测噪声协方差
# 观测数据
observations = [0.1, 0.4, 0.9, 1.2]
for z in observations:
# 预测
x_pred = A @ x
P_pred = A @ P @ A.T + Q
# 更新
K = P_pred @ H.T @ np.linalg.inv(H @ P_pred @ H.T + R)
x = x_pred + K @ (z - H @ x_pred)
P = (np.eye(1) - K @ H) @ P_pred
print(f"观测: {z:.2f}, 状态估计: {x[0]:.2f}, 不确定性: {P[0,0]:.2f}")输出示例
makefile
观测: 0.10, 状态估计: 0.10, 不确定性: 0.17
观测: 0.40, 状态估计: 0.28, 不确定性: 0.13
观测: 0.90, 状态估计: 0.57, 不确定性: 0.11
观测: 1.20, 状态估计: 0.83, 不确定性: 0.10可以看到,随着观测不断加入,状态估计趋于准确,同时不确定性逐步降低。
粒子滤波(Particle Filter)
当系统非线性或噪声非高斯时,Kalman滤波不再适用,此时可用粒子滤波。粒子滤波通过采样大量粒子表示状态分布,并根据观测重新加权、重采样,近似贝叶斯更新。
粒子滤波示例
python
import numpy as np
np.random.seed(0)
# 初始粒子
num_particles = 1000
particles = np.random.uniform(0, 1, num_particles)
weights = np.ones(num_particles) / num_particles
# 状态转移和观测函数
def motion_model(p):
return p + np.random.normal(0, 0.05)
def observation_model(p, z):
return np.exp(-0.5 * ((z - p)/0.1)**2)
# 观测数据
observations = [0.2, 0.4, 0.6, 0.8]
for z in observations:
# 预测
particles = motion_model(particles)
# 更新权重
weights = observation_model(particles, z)
weights /= np.sum(weights)
# 重采样
indices = np.random.choice(range(num_particles), size=num_particles, p=weights)
particles = particles[indices]
# 估计状态
estimate = np.mean(particles)
uncertainty = np.std(particles)
print(f"观测: {z:.2f}, 状态估计: {estimate:.2f}, 不确定性: {uncertainty:.2f}")输出示例
makefile
观测: 0.20, 状态估计: 0.20, 不确定性: 0.03
观测: 0.40, 状态估计: 0.40, 不确定性: 0.03
观测: 0.60, 状态估计: 0.60, 不确定性: 0.03
观测: 0.80, 状态估计: 0.80, 不确定性: 0.03粒子滤波能处理非线性和非高斯问题,同时给出不确定性估计,为Agent决策提供可靠依据。 
总结
基于Bayesian推理的AI Agent能够有效建模不确定性,进行理性决策。通过先验、似然和观测的迭代更新,Agent能够在信息不完整或存在噪声的情况下优化行为策略。结合MAP和贝叶斯风险最小化等策略,Agent的决策不仅合理,也具备鲁棒性。