一、 核心功能
GoogCcNetworkController 是 WebRTC Google Congestion Control (GoogCC) 算法的网络控制核心。它负责根据网络反馈(如延迟、丢包、带宽估计)来调整发送端的码率、探测行为、拥塞窗口等,其主要功能包括:
-
带宽估计:基于延迟(Delay-Based)和丢包(Loss-Based)两种算法综合估算可用带宽。
-
码率控制:根据带宽估计结果、目标约束和网络状态,计算目标发送码率。
-
探测控制:负责发起带宽探测(如初始探测、ALR 探测、定期探测等),以快速发现可用带宽。
-
拥塞窗口控制:基于 RTT 和码率动态调整拥塞窗口,实现基于延迟的拥塞避免。
-
路由适应:当检测到网络路由变化时,安全地重置估计器状态。
-
ALR 检测:检测应用受限区域(Application Limited Region),辅助码率控制决策。
二、 核心算法原理
a. 延迟带宽估计(Delay-Based BWE)
-
原理:通过分析数据包的单向延迟变化趋势判断网络拥塞。
-
实现 :
DelayBasedBwe类使用趋势线滤波器或过载检测器,判断网络是处于"正常"、"过载"还是"欠载"状态,并据此调整带宽估计值。
b. 丢包带宽估计(Loss-Based BWE)
-
原理:根据丢包率调整发送码率。丢包率高时降低码率,低时提高码率。
-
实现 :
SendSideBandwidthEstimation根据接收端反馈的丢包信息,使用加性增、乘性减(AIMD)策略调整码率。
c. 联合控制
-
最终目标码率取延迟估计和丢包估计的最小值,确保不超过网络容量。
-
支持使用网络状态预测器进一步优化估计。
三、 关键数据结构
a. GoogCcConfig(配置结构)
struct GoogCcConfig {
std::unique_ptr<NetworkStateEstimator> network_state_estimator;
std::unique_ptr<NetworkStatePredictor> network_state_predictor;
bool feedback_only; // 是否仅使用传输反馈(而非RTCP)
};b. GoogCcNetworkController 成员变量
// 估计器与控制组件
std::unique_ptr<SendSideBandwidthEstimation> bandwidth_estimation_;
std::unique_ptr<DelayBasedBwe> delay_based_bwe_;
std::unique_ptr<AcknowledgedBitrateEstimatorInterface> acknowledged_bitrate_estimator_;
std::unique_ptr<ProbeController> probe_controller_;
std::unique_ptr<CongestionWindowPushbackController> congestion_window_pushback_controller_;
// 状态与配置
DataRate last_loss_based_target_rate_; // 最近一次基于丢包的目标码率
DataRate last_pushback_target_rate_; // 经拥塞窗口 pushback 调整后的码率
absl::optional<DataSize> current_data_window_; // 当前拥塞窗口大小
LossBasedState last_loss_base_state_; // 丢包控制状态机状态c. 网络状态枚举
enum class BandwidthUsage { kBwNormal, kBwUnderusing, kBwOverusing };
enum class LossBasedState {
kDecreasing,
kIncreaseUsingPadding,
kIncreasing,
kDelayBasedEstimate
};四、 核心方法详解
a. OnTransportPacketsFeedback(处理反馈包)
这是最重要的方法,处理接收端返回的传输反馈信息。
NetworkControlUpdate GoogCcNetworkController::OnTransportPacketsFeedback(
TransportPacketsFeedback report) {
// 1. 更新RTT、传播延迟、丢包率
// 2. 更新确认码率估计(acknowledged_bitrate_estimator_)
// 3. 处理探测包并估算探测码率(probe_bitrate_estimator_)
// 4. 调用 delay_based_bwe_->IncomingPacketFeedbackVector 更新延迟估计
// 5. 调用 bandwidth_estimation_->UpdateLossBasedEstimator 更新丢包估计
// 6. 触发状态更新(MaybeTriggerOnNetworkChanged)
// 7. 更新拥塞窗口(UpdateCongestionWindowSize)
// 8. 返回网络控制更新(如目标码率、探测集群、拥塞窗口等)
}b. MaybeTriggerOnNetworkChanged(触发网络状态更新)
void GoogCcNetworkController::MaybeTriggerOnNetworkChanged(
NetworkControlUpdate* update,
Timestamp at_time) {
// 获取当前带宽估计、丢包率、RTT
DataRate loss_based_target_rate = bandwidth_estimation_->target_rate();
uint8_t fraction_loss = bandwidth_estimation_->fraction_loss();
TimeDelta round_trip_time = bandwidth_estimation_->round_trip_time();
// 如果状态变化,更新目标码率并设置探测
if (loss_based_target_rate != last_loss_based_target_rate_ || ...) {
TargetTransferRate target_rate_msg;
target_rate_msg.target_rate = pushback_target_rate; // 可能经过拥塞窗口调整
target_rate_msg.stable_target_rate = stable_target_rate;
// ... 设置网络估计参数(丢包率、RTT、周期)
update->target_rate = target_rate_msg;
// 请求探测
auto probes = probe_controller_->SetEstimatedBitrate(...);
update->probe_cluster_configs.insert(...);
}
}c. ResetConstraints(重置码率约束)
std::vector<ProbeClusterConfig> GoogCcNetworkController::ResetConstraints(
TargetRateConstraints new_constraints) {
// 更新最小、最大、起始码率约束
min_target_rate_ = new_constraints.min_data_rate.value_or(DataRate::Zero());
max_data_rate_ = new_constraints.max_data_rate.value_or(DataRate::PlusInfinity());
starting_rate_ = new_constraints.starting_rate;
ClampConstraints(); // 确保约束有效性
// 更新带宽估计器和延迟估计器
bandwidth_estimation_->SetBitrates(...);
if (starting_rate_)
delay_based_bwe_->SetStartBitrate(*starting_rate_);
// 返回初始探测集群配置
return probe_controller_->SetBitrates(...);
}五、 设计亮点
-
多算法融合:结合延迟、丢包、确认码率、网络状态估计等多种信息,综合决策。
-
自适应探测机制:支持多种探测策略(初始探测、ALR 探测、最大分配码率触发探测等)。
-
拥塞窗口 Pushback:在带宽受限时通过拥塞窗口反向压制发送码率,防止队列堆积。
-
路由改变安全重置:支持在路由改变时选择性地重置估计器,避免历史信息误导。
-
配置灵活 :通过
FieldTrials实现大量算法参数和策略的运行时配置(A/B 测试)。
六、 典型工作流程
-
初始化:根据初始配置(起始码率、最小/最大码率)设置估计器,并发起初始探测。
-
反馈处理 :收到
TransportPacketsFeedback后,更新 RTT、丢包、确认码率、延迟趋势等信息。 -
带宽估计:
-
延迟估计器(
delay_based_bwe_)更新状态并返回新估计。 -
丢包估计器(
bandwidth_estimation_)根据丢包率调整码率。
-
-
状态决策 :若估计值发生变化,触发
MaybeTriggerOnNetworkChanged:-
计算目标码率(可能经拥塞窗口调整)。
-
设置网络状态估计(丢包率、RTT、周期)。
-
请求探测(若需要)。
-
-
输出控制 :返回
NetworkControlUpdate,包含:-
target_rate:目标发送码率。 -
probe_cluster_configs:探测集群配置。 -
congestion_window:拥塞窗口大小(如果启用)。 -
pacer_config: pacing 速率配置。
-
GoogCcNetworkController 类时序图
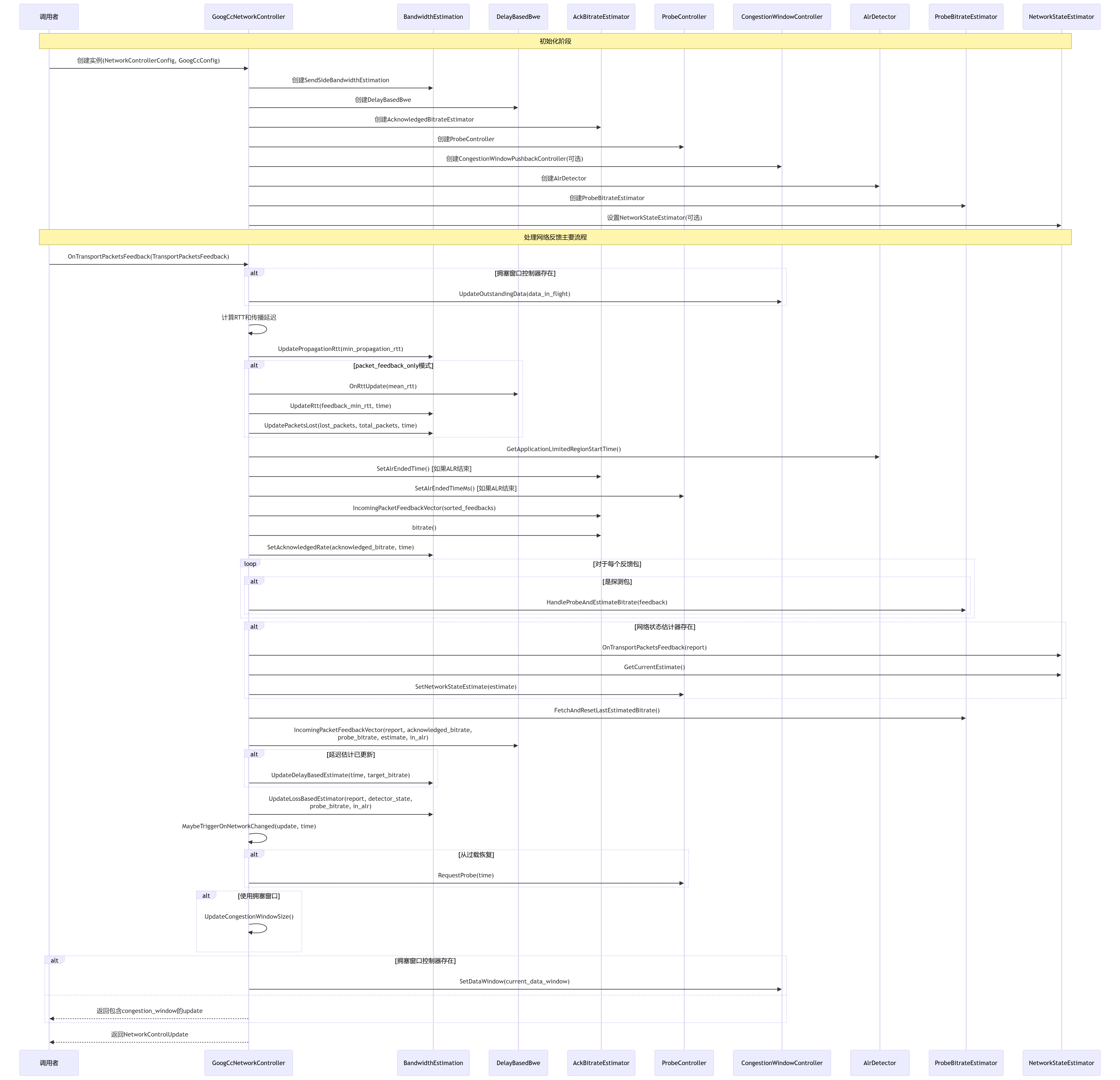
初始化阶段
-
调用者创建
GoogCcNetworkController实例,传入配置参数 -
控制器创建所有必要的子组件:
-
带宽估计器 (
SendSideBandwidthEstimation) -
延迟带宽估计器 (
DelayBasedBwe) -
确认码率估计器 (
AcknowledgedBitrateEstimator) -
探测控制器 (
ProbeController) -
拥塞窗口控制器 (
CongestionWindowPushbackController,可选) -
ALR检测器 (
AlrDetector) -
探测码率估计器 (
ProbeBitrateEstimator) -
网络状态估计器 (
NetworkStateEstimator,可选)
-
处理网络反馈主要流程
-
调用者调用
OnTransportPacketsFeedback方法,传入传输包反馈数据 -
如果有拥塞窗口控制器,更新在途数据量
-
计算RTT和传播延迟,更新带宽估计器
-
在 packet_feedback_only 模式下,更新RTT和丢包信息
-
检查ALR状态变化,更新相关组件
-
将反馈包输入确认码率估计器,获取确认码率并设置到带宽估计器
-
处理探测包,更新探测码率估计
-
如果有网络状态估计器,更新网络状态估计并通知探测控制器
-
获取探测码率估计值
-
将反馈包输入延迟带宽估计器,获取新的延迟估计
-
如果延迟估计已更新,更新带宽估计器的延迟估计值
-
更新基于丢包的估计器
-
可能触发网络状态变更,更新目标码率和探测配置
-
如果从过载状态恢复,请求探测
-
如果使用拥塞窗口,更新拥塞窗口大小
-
如果有拥塞窗口控制器,设置数据窗口;否则直接返回拥塞窗口
-
返回网络控制更新
这个时序图展示了 GoogCcNetworkController 如何处理网络反馈并生成控制决策的完整流程,突出了各组件之间的协作关系和数据处理顺序。
GoogCcNetworkController 类架构关系图
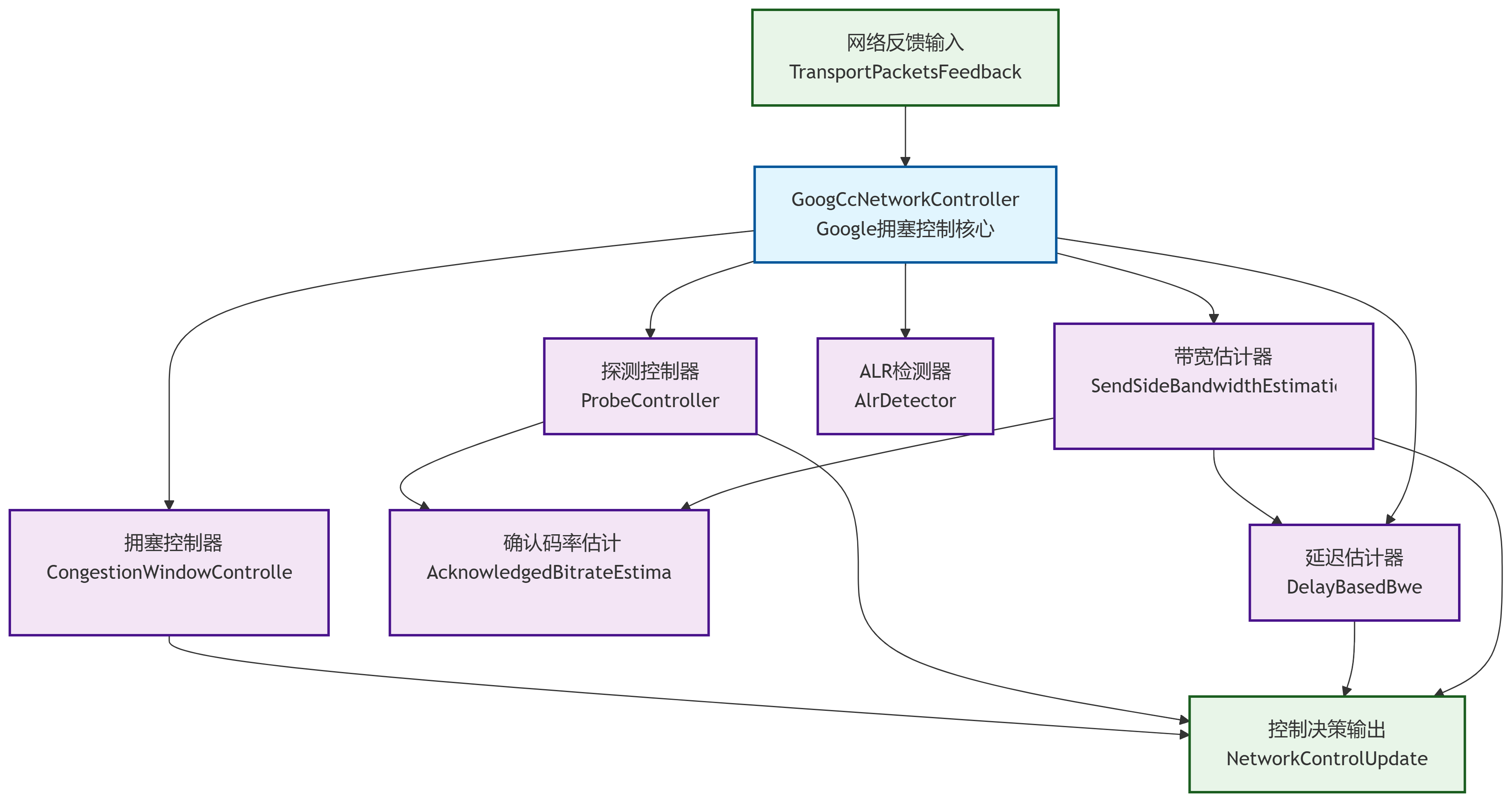
核心控制器
- GoogCcNetworkController: Google拥塞控制算法的核心实现,负责协调所有子组件。
主要组件
-
带宽估计器 (SendSideBandwidthEstimation): 综合延迟和丢包信息进行带宽估计
-
延迟估计器 (DelayBasedBwe): 基于网络延迟变化进行带宽估计
-
探测控制器 (ProbeController): 管理带宽探测策略
辅助组件
-
确认码率估计 (AcknowledgedBitrateEstimator): 估算已确认数据的传输速率
-
拥塞控制器 (CongestionWindowController): 管理拥塞窗口大小和反压机制
-
ALR检测器 (AlrDetector): 检测应用受限区域
数据流向
-
输入 : 网络反馈数据通过
TransportPacketsFeedback传入控制器 -
处理: 控制器协调各组件处理数据并生成估计结果
-
输出 : 生成
NetworkControlUpdate包含目标码率、探测配置等控制决策
注释精要
// 核心网络控制器类,实现 GoogCC 拥塞控制算法
class GoogCcNetworkController : public NetworkControllerInterface {
public:
// 构造函数,接受网络控制器配置和 GoogCC 特定配置
GoogCcNetworkController(NetworkControllerConfig config, GoogCcConfig goog_cc_config);
// 处理网络可用性变化(如网络中断恢复)
NetworkControlUpdate OnNetworkAvailability(NetworkAvailability msg) override;
// 处理网络路由变化(如切换WiFi/4G),可能重置估计器
NetworkControlUpdate OnNetworkRouteChange(NetworkRouteChange msg) override;
// 处理定时处理间隔,更新状态、执行探测、更新拥塞窗口等
NetworkControlUpdate OnProcessInterval(ProcessInterval msg) override;
// 处理接收端报告的 REMB(仅在使用 RTCP 时有效)
NetworkControlUpdate OnRemoteBitrateReport(RemoteBitrateReport msg) override;
// 处理 RTT 更新(非平滑值)
NetworkControlUpdate OnRoundTripTimeUpdate(RoundTripTimeUpdate msg) override;
// 处理发送包事件,更新 ALR 检测和已发送数据量
NetworkControlUpdate OnSentPacket(SentPacket msg, bool is_video) override;
// 处理接收包事件(当前为空实现)
NetworkControlUpdate OnReceivedPacket(ReceivedPacket msg) override;
// 处理流配置变化(如 ALR 探测开关、最大分配码率等)
NetworkControlUpdate OnStreamsConfig(StreamsConfig msg) override;
// 处理目标码率约束变化(如用户手动设置码率范围)
NetworkControlUpdate OnTargetRateConstraints(TargetRateConstraints msg) override;
// 处理传输丢包报告(非反馈包模式)
NetworkControlUpdate OnTransportLossReport(TransportLossReport msg) override;
// 【核心】处理传输包反馈(Transport-CC 反馈),更新估计值并返回控制决策
NetworkControlUpdate OnTransportPacketsFeedback(TransportPacketsFeedback msg) override;
// 处理网络状态估计(来自外部估计器)
NetworkControlUpdate OnNetworkStateEstimate(NetworkStateEstimate msg) override;
// 获取当前网络状态(目标码率、 pacing 配置、拥塞窗口等)
NetworkControlUpdate GetNetworkState(Timestamp at_time) const;
};作为网络控制的核心组件,GoogCcNetworkController 直接决定视频通话的质量和稳定性,通过智能的带宽估计和码率控制,在保证流畅性的同时最大化视频质量。
这类是 WebRTC 拥塞控制系统的关键组成部分,广泛应用于实时音视频通信场景中。