在工业高温炉管检测与维护领域,炉管爬行器是实现管道内部自动化作业的关键设备。为解决传统爬行器运动稳定性差、多轴协同精度不足等问题,采用PMMP40一体化伺服电机,通过CANopen总线同步控制技术,显著提升了设备在高温复杂环境下的运动精度与可靠性。
1.炉管爬行器简介

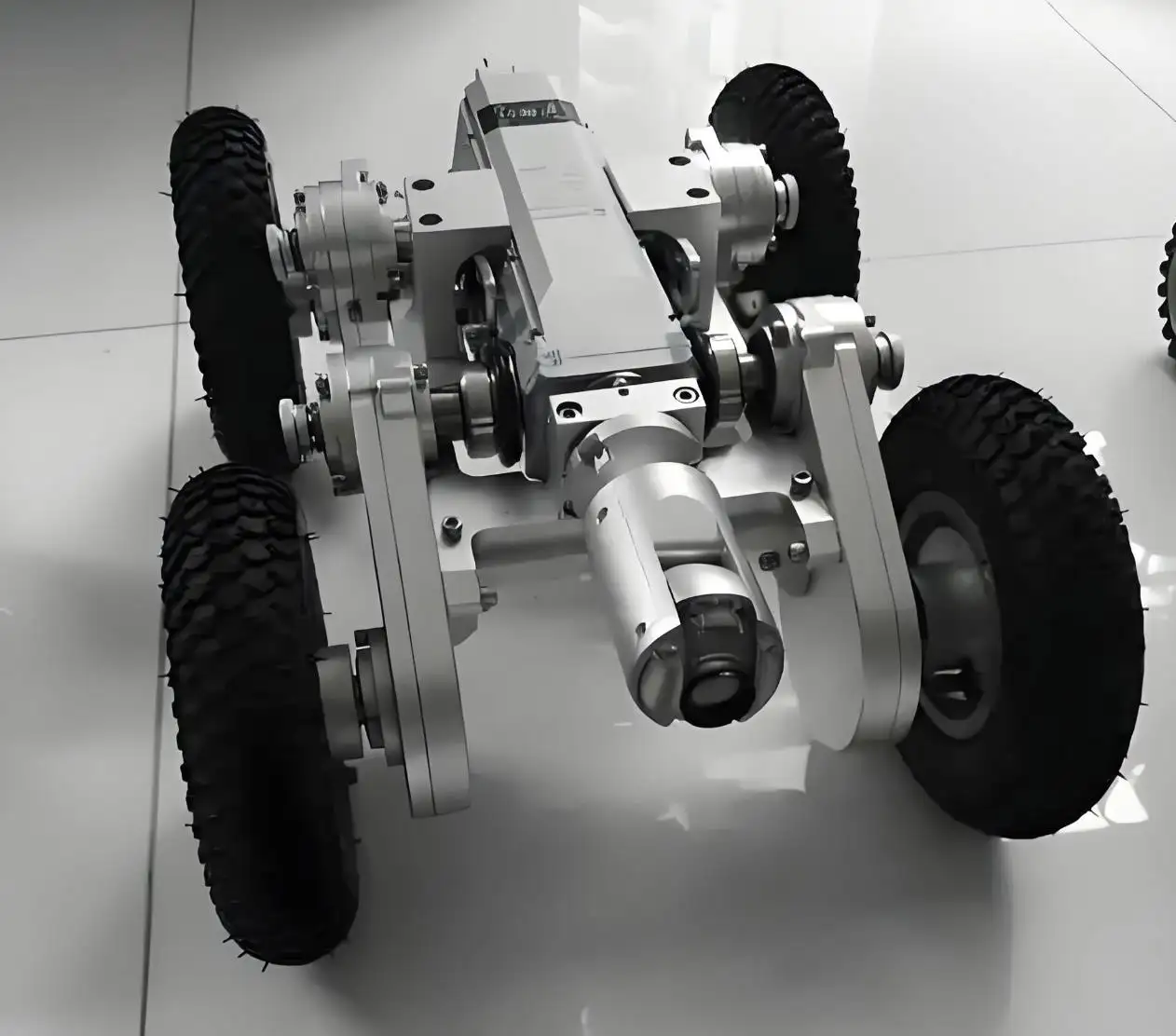
炉管爬行器是一种用于高温工业炉管内部检测、清洁或维修的特种机器人,需满足以下核心需求:
1.高温适应性:长期耐受300℃以上高温环境;
2.多轴协同:4台驱动电机需严格同步,确保爬行器平稳移动;
3.低速稳定性:以0.02~0.4m/s速度范围精准作业,避免卡顿或打滑。
2.应用方案与产品
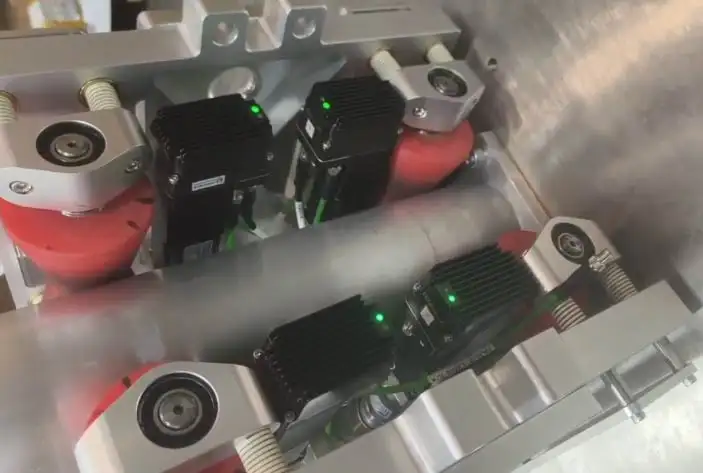

•伺服电机型号:PMMP4010B-CANopen(一体化设计,集成控制器与编码器);
•传动系统:高精度齿轮组,减速比适配低速重载工况;
•控制模式:PP(轮廓位置)模式,支持预设位置轨迹规划。
•通过CANopen总线协议实现4台电机同步控制,采用PDO同步模式确保动作一致性;
•上位机实时监控各电机扭矩、位置反馈,动态调整运动参数。
3.问题与解决
1.遇到的问题
多电机同步问题
4台电机动作不同步导致爬行器偏移
低速卡顿现象
0.08m/s时运动卡顿,0.02m/s运行正常
参数适配性不足
加减速0.2m/s²时电机响应滞后
2.解决方案
启用CANopen PDO同步模式,优化总线通信周期
更换大功率电源,确保电机在高速段供电稳定
调整速度环PID参数,降低加速度斜率
4.应用效果
1.同步精度提升:4台电机位置同步误差≤0.05mm,满足炉管狭窄空间作业需求;
2.速度稳定性优化:0.02~0.4m/s全速段运行平稳,卡顿问题完全消除;
3.可靠性增强:连续高温作业200小时后无性能衰减,故障率降低60%。
5.总结概要
通过一体化伺服电机的应用,攻克了炉管爬行器在多轴协同、低速稳定性方面的技术瓶颈。该案例验证了PMMP4010B型号伺服电机在高温、高精度场景下的卓越性能,为特种机器人驱动系统提供了标准化解决方案,未来可拓展至化工管道检测、核设施维护等更严苛领域。
【一体化电机优势】
高集成度提升设备便携性:一体化步进/伺服电机集成了步进(伺服)电机、驱动器、编码器和控制器等功能模块,大大减少了设备的体积和重量。同时,简化系统布线、减少潜在故障点。
灵活性满足多样化需求:一体化步进/伺服电机支持CANopen/Modbus通信,可以根据需要进行灵活的控制和调整,适应不同的工作需求。
高精度定位提升测量精度:一体化步进电机具有较高的定位精度,能够实现移动设备的高精度定位。
多种控制模式:支持 PP、 VM、 PV、 PT、 HM、 IP、 CSP、 CSV、 CST 标准模式;支持NiMotion位置模式、NiMotion速度模式、NiMotion力矩模式。
高速响应提升设备效率:一体化步进/伺服电机具有快速的响应速度,能够快速调整设备的角度和位置。这意味着机器人可以更快速地获取环境信息,提高设备的工作效率和响应能力。
完善的报警功能:一体化步进/伺服电机上电自检诊断,能及时发现硬件故障,避免影响系统运行搭载多种安全保护功能, 通过 LED 闪烁警报,直观显示电机当前状态,同时具备过压/欠压、过热、过流、堵转报警等保护功能。
以上即是今天分享的全部内容,如果您有任何问题请及时联系我们。
˜ 本文章全部内容或部分内容禁止擅自转载、拷贝。