OpenCV计算机视觉实战(22)------图像拼接详解
0. 前言
在计算机视觉应用中,图像拼接技术是将多张重叠图像融合为一张大视角图像的关键技术,广泛应用于无人驾驶、全景摄影、工业检测等场景。本文将介绍图像拼接的完整流程,从特征提取与匹配入手,介绍如何通过单应矩阵实现图像配准,接着讲解透视变换与图像融合的技术细节,并最终构建一个具有圆柱投影与多频段融合能力的全景图拼接系统。
1. 特征匹配与配准
提取两张图像中不变的局部特征(如 SIFT、ORB),通过描述符匹配找到对应点对,再使用 RANSAC 估计它们之间的单应性矩阵,用于后续对齐变换。
1.1 实现过程
- 加载图像并灰度化
- 创建特征检测器(如
SIFT或ORB),调用detectAndCompute得到关键点与描述符 - 匹配描述符,使用
BFMatcher(或FLANN),并应用Lowe比率测试过滤假匹配 - 用
RANSAC在匹配点对上调用findHomography估计3 × 3单应性矩阵H - 返回
H和内点掩码供下游使用
python
import cv2
import numpy as np
def register_images(img1, img2, method='sift'):
"""
功能:对两幅图像 img1, img2 进行特征匹配并计算单应性矩阵 H
返回:H 以及内点匹配掩码
"""
# 1. 灰度化
gray1 = cv2.cvtColor(img1, cv2.COLOR_BGR2GRAY)
gray2 = cv2.cvtColor(img2, cv2.COLOR_BGR2GRAY)
# 2. 特征检测与描述
if method == 'sift':
detector = cv2.SIFT_create()
else:
detector = cv2.ORB_create(5000)
kp1, des1 = detector.detectAndCompute(gray1, None)
kp2, des2 = detector.detectAndCompute(gray2, None)
# 3. 描述符匹配与比率测试
if method == 'sift':
matcher = cv2.BFMatcher(cv2.NORM_L2)
else:
matcher = cv2.BFMatcher(cv2.NORM_HAMMING)
raw_matches = matcher.knnMatch(des1, des2, k=2)
good = []
for m,n in raw_matches:
if m.distance < 0.75 * n.distance:
good.append(m)
if len(good) < 4:
raise RuntimeError("Not enough matches")
# 4. 构建点对并 RANSAC 估计单应性
src_pts = np.float32([kp1[m.queryIdx].pt for m in good]).reshape(-1,1,2)
dst_pts = np.float32([kp2[m.trainIdx].pt for m in good]).reshape(-1,1,2)
H, mask = cv2.findHomography(src_pts, dst_pts, cv2.RANSAC, 5.0)
return H, mask
imgA = cv2.imread('left.jpg')
imgB = cv2.imread('right.jpg')
H, mask = register_images(imgA, imgB, method='sift')
print("Estimated Homography:\n", H)关键函数解析:
detectAndCompute(gray, mask):一次性检测关键点并计算描述符BFMatcher(normType) + knnMatch(..., k=2):返回每个描述符的最近两邻,用于Lowe比率测试cv2.findHomography(srcPts, dstPts, method, ransacReprojThreshold):RANSAC筛除离群匹配,估计可靠的单应性矩阵
1.2 优化思路
-
FLANN加速
对于大尺寸特征集,用BFMatcher会变慢,可用FLANN:pythonindex_params = dict(algorithm=1, trees=5) # KDTree for SIFT/SURF search_params = dict(checks=50) matcher = cv2.FlannBasedMatcher(index_params, search_params) -
Cross-Check双向验证
同时做matcher.match(des1,des2)与matcher.match(des2,des1),只保留两者都存在的匹配,进一步过滤误配 -
可视化优化
用cv2.drawMatchesKnn显示前50个内点,并在匹配线上标注距离,帮助调参
python
import cv2
import numpy as np
def register_images(img1, img2, method='sift'):
"""
功能:对两幅图像 img1, img2 进行特征匹配并计算单应性矩阵 H
返回:H 以及内点匹配掩码
"""
# 1. 灰度化
gray1 = cv2.cvtColor(img1, cv2.COLOR_BGR2GRAY)
gray2 = cv2.cvtColor(img2, cv2.COLOR_BGR2GRAY)
# 2. 特征检测与描述
if method == 'sift':
detector = cv2.SIFT_create()
else:
detector = cv2.ORB_create(5000)
kp1, des1 = detector.detectAndCompute(gray1, None)
kp2, des2 = detector.detectAndCompute(gray2, None)
# 3. 描述符匹配与比率测试
if method == 'sift':
# FLANN Matcher
index_params = dict(algorithm=1, trees=5)
search_params = dict(checks=50)
matcher = cv2.FlannBasedMatcher(index_params, search_params)
raw_matches = matcher.knnMatch(des1, des2, k=2)
else:
# ORB 仍用 Hamming+crossCheck
matcher = cv2.BFMatcher(cv2.NORM_HAMMING, crossCheck=True)
raw = matcher.match(des1, des2)
# 转为 knn 格式以便后续流程一致
raw_matches = [[m] for m in raw]
# Ratio Test & cross-check
good = []
if method == 'sift':
for m,n in raw_matches:
if m.distance < 0.75 * n.distance:
good.append(m)
else:
good = [m for [m] in raw_matches]
# 可视化前 50 匹配
vis = cv2.drawMatches(
img1, kp1, img2, kp2, good[:50], None,
flags=cv2.DrawMatchesFlags_NOT_DRAW_SINGLE_POINTS
)
cv2.imshow('Matches', vis)
cv2.waitKey()
# 4. 构建点对并 RANSAC 估计单应性
src_pts = np.float32([kp1[m.queryIdx].pt for m in good]).reshape(-1,1,2)
dst_pts = np.float32([kp2[m.trainIdx].pt for m in good]).reshape(-1,1,2)
H, mask = cv2.findHomography(src_pts, dst_pts, cv2.RANSAC, 5.0)
return H, mask
imgA = cv2.imread('left.jpg')
imgB = cv2.imread('right.jpg')
H, mask = register_images(imgA, imgB, method='sift')
print("Estimated Homography:\n", H)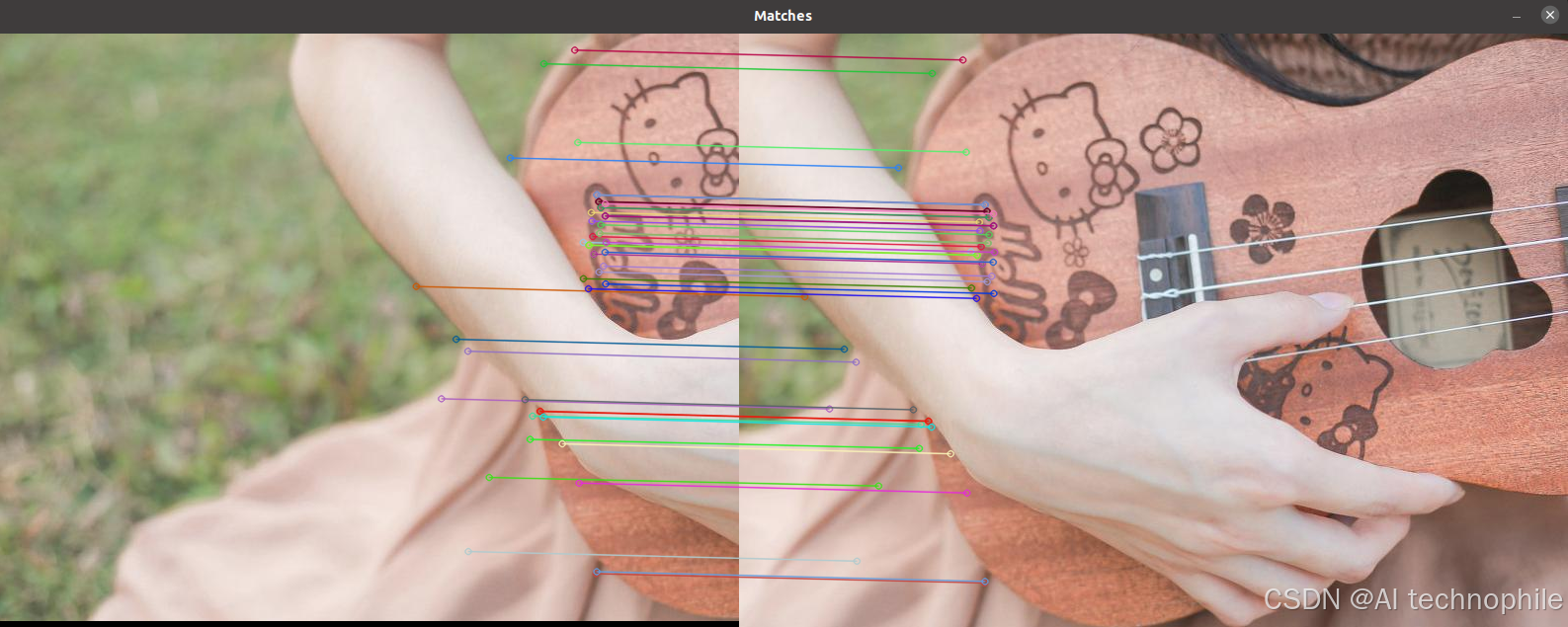
关键函数解析:
cv2.FlannBasedMatcher(index_params, search_params):在大数据集上加速最近邻搜索knnMatch(des1, des2, k):返回每个描述符的k个最邻近匹配cv2.drawMatches(...):绘制匹配对,可灵活显示前若干对加速调试
2. 透视变换与融合
2.1 实现过程
- 计算输出画布大小:通过变换四个角点,确定拼接后图像的边界范围
- 应用
warpPerspective:将第二张图投影到与第一张图相同的坐标系 - 创建融合掩码:对重叠区域使用线性权重渐变以平滑过渡
- 叠加图像:按权重合并两张图,或直接用前景覆盖背景
python
def warp_and_blend(img1, img2, H):
"""
功能:根据单应性矩阵 H,将 img2 投影到 img1 坐标系并线性融合
返回:拼接后的图像
"""
h1, w1 = img1.shape[:2]
h2, w2 = img2.shape[:2]
# 1. 计算 img2 角点在 img1 坐标系中的投影
corners_img2 = np.float32([[0,0],[0,h2],[w2,h2],[w2,0]]).reshape(-1,1,2)
projected = cv2.perspectiveTransform(corners_img2, H)
all_corners = np.concatenate((projected, np.float32([[0,0],[0,h1],[w1,h1],[w1,0]]).reshape(-1,1,2)), axis=0)
[xmin, ymin] = np.int32(all_corners.min(axis=0).ravel() - 0.5)
[xmax, ymax] = np.int32(all_corners.max(axis=0).ravel() + 0.5)
t = [-xmin, -ymin]
# 2. 平移矩阵,扩大画布
M_trans = np.array([[1,0,t[0]],[0,1,t[1]],[0,0,1]])
M_trans = np.asarray(M_trans, dtype=np.float32)
out_size = (xmax - xmin, ymax - ymin)
# 3. 投影 img2
warped_img2 = cv2.warpPerspective(img2, M_trans.dot(H), out_size)
# 4. 将 img1 放入画布
canvas = cv2.warpPerspective(img1, M_trans, out_size)
# 5. 创建融合掩码
overlap = (canvas>0) & (warped_img2>0)
# 简单线性融合:对 overlap 区域做平均
blended = canvas.copy()
blended[overlap] = cv2.addWeighted(canvas, 0.5, warped_img2, 0.5, 0)[overlap]
# 非重叠区域直接叠加
blended[~overlap] = canvas[~overlap] + warped_img2[~overlap]
return blended
pan = warp_and_blend(imgA, imgB, H)
cv2.imshow('Blended Panorama', pan)
cv2.waitKey(0)
cv2.destroyAllWindows()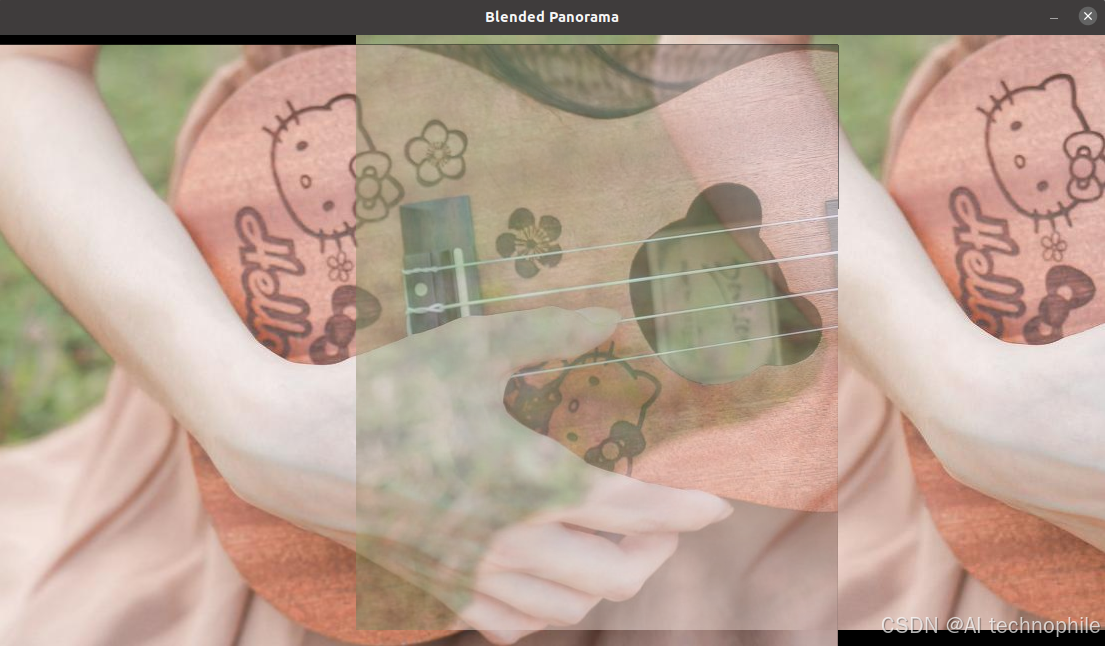
关键函数解析:
cv2.perspectiveTransform(pts, H):对点集应用单应性,用于确定输出边界cv2.warpPerspective(img, M, dsize):按3 × 3矩阵M进行透视变换- 线性融合:对重叠区域直接平均,可替换为权重渐变或多频段融合提升无缝效果
2.2 优化思路
-
曝光补偿
不同图像亮度差异大时,可先做增益补偿:pythoncomp = cv2.detail_Timelapser_createDefault(cv2.detail_TIMELAPSE_GAIN) comp.process(canvas, (0,0), warped_img2, (0,0)) -
多频段融合
用OpenCV的cv2.detail_MultiBandBlender,在低频段平滑融合,高频段保留细节,提高视觉效果 -
自动裁剪
拼接后常有黑边,可用轮廓检测或投影后非零区域最小矩形做自动裁剪
python
def warp_and_multiband_blend(img1, img2, H):
# 获取图像尺寸
h1, w1 = img1.shape[:2]
h2, w2 = img2.shape[:2]
# 将图像2的角点投影到图像1的坐标系中
corners_img2 = np.float32([[0, 0], [0, h2], [w2, h2], [w2, 0]]).reshape(-1, 1, 2)
warped_corners = cv2.perspectiveTransform(corners_img2, H)
# 计算整体图像范围
all_corners = np.concatenate((warped_corners, np.float32([[0, 0], [0, h1], [w1, h1], [w1, 0]]).reshape(-1, 1, 2)), axis=0)
[xmin, ymin] = np.int32(all_corners.min(axis=0).ravel() - 0.5)
[xmax, ymax] = np.int32(all_corners.max(axis=0).ravel() + 0.5)
width, height = xmax - xmin, ymax - ymin
# 平移变换矩阵,使得所有图像内容为正坐标
translation = np.array([[1, 0, -xmin],
[0, 1, -ymin],
[0, 0, 1]])
# 变换图像2
H_translated = translation @ H
warped2 = cv2.warpPerspective(img2, H_translated, (width, height))
# 平移后的图像1放入大画布
canvas1 = np.zeros((height, width, 3), dtype=img1.dtype)
canvas1[-ymin:h1 - ymin, -xmin:w1 - xmin] = img1
# 多频带融合
composer = cv2.detail_MultiBandBlender()
composer.prepare((0, 0, width, height))
# 构建遮罩图像
mask1 = 255 * np.ones(img1.shape[:2], np.uint8)
mask2 = 255 * np.ones(img2.shape[:2], np.uint8)
mask1_canvas = np.zeros((height, width), dtype=np.uint8)
mask1_canvas[-ymin:h1 - ymin, -xmin:w1 - xmin] = mask1
mask2_warped = cv2.warpPerspective(mask2, H_translated, (width, height))
# 输入融合器
composer.feed(canvas1.astype(np.int16), mask1_canvas, (0, 0))
composer.feed(warped2.astype(np.int16), mask2_warped, (0, 0))
# 融合输出
result, result_mask = composer.blend(None, None)
# 自动裁剪有效区域
ys, xs = np.where(result_mask > 0)
x1, y1, x2, y2 = xs.min(), ys.min(), xs.max(), ys.max()
return result[y1:y2, x1:x2].astype(np.uint8)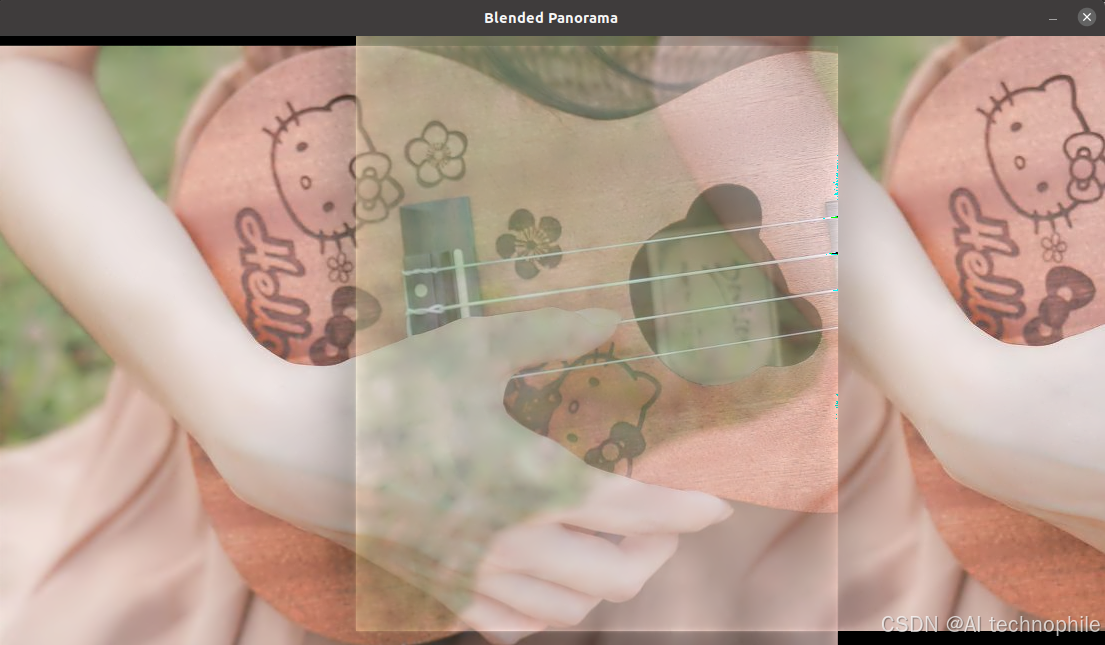
关键函数解析:
cv2.detail_MultiBandBlender():创建多频段融合器,分层处理不同频率信息composer.feed(img, mask, topleft):向融合器输入图像与对应掩码及位置composer.blend():执行多频段融合,返回融合后图像与掩码- 后续用
where(mask>0)找到有效区域并裁剪
3. 全景图生成
将配准与融合模块串联,循环处理多幅输入图像,自动拼接生成完整全景图。支持任意数量顺序图像,前景连续叠加。
3.1 实现过程
- 读取图像列表
- 初始化全景图为第一张图
- 依次对下一张图
- 调用配准模块获取
H_i - 调用融合模块将新图与当前全景图拼接
- 调用配准模块获取
- 输出最终结果
python
def create_panorama(image_paths, method='sift'):
# 1. 读取首图
pano = cv2.imread(image_paths[0])
for path in image_paths[1:]:
img = cv2.imread(path)
# 2. 特征配准
H, mask = register_images(pano, img, method=method)
# 3. 透视融合
pano = warp_and_blend(pano, img, H)
return pano
paths = sorted(glob.glob('images/*.jpg'))
panorama = create_panorama(paths, method='sift')
cv2.imshow('Final Panorama', panorama)
cv2.waitKey(0)
cv2.destroyAllWindows()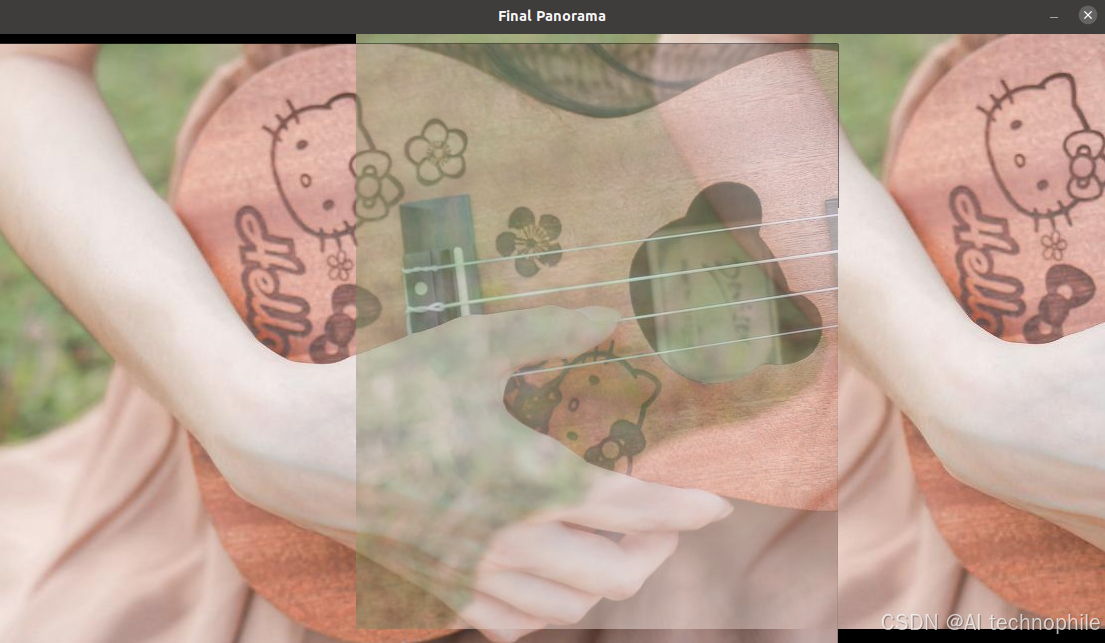
关键函数解析:
glob.glob(pattern):批量读取文件路径,保证输入顺序- 在循环中不断将
pano与下一图配准、融合,无需维护复杂的数据结构 - 支持切换
method以选择SIFT(精度高)或ORB(速度快)
小结
图像拼接是一项融合特征匹配、几何变换与图像融合等多项技术的综合性任务。本文首先讲解了如何通过 SIFT 或 ORB 特征提取配合 RANSAC 估算单应性矩阵,实现图像之间的精确配准。接着介绍了透视变换与线性融合的基础流程,并进一步引入曝光补偿与多频段融合策略,提升拼接结果的无缝性与视觉质量。通过合理组织模块并优化细节,最终可构建出一个高鲁棒性、高质量的自动全景图拼接系统。
系列链接
OpenCV计算机视觉实战(1)------计算机视觉简介
OpenCV计算机视觉实战(2)------环境搭建与OpenCV简介
OpenCV计算机视觉实战(3)------计算机图像处理基础
OpenCV计算机视觉实战(4)------计算机视觉核心技术全解析
OpenCV计算机视觉实战(5)------图像基础操作全解析
OpenCV计算机视觉实战(6)------经典计算机视觉算法
OpenCV计算机视觉实战(7)------色彩空间详解
OpenCV计算机视觉实战(8)------图像滤波详解
OpenCV计算机视觉实战(9)------阈值化技术详解
OpenCV计算机视觉实战(10)------形态学操作详解
OpenCV计算机视觉实战(11)------边缘检测详解
OpenCV计算机视觉实战(12)------图像金字塔与特征缩放
OpenCV计算机视觉实战(13)------轮廓检测详解
OpenCV计算机视觉实战(14)------直方图均衡化
OpenCV计算机视觉实战(15)------霍夫变换详解
OpenCV计算机视觉实战(16)------图像分割技术
OpenCV计算机视觉实战(17)------特征点检测详解
OpenCV计算机视觉实战(18)------视频处理详解
OpenCV计算机视觉实战(19)------特征描述符详解
OpenCV计算机视觉实战(20)------光流法运动分析
OpenCV计算机视觉实战(21)------模板匹配详解