Isaac Sim机械臂教程 - 阶段1:基础环境搭建与机械臂加载
isaacsim平台以及环境搭建见下文
1. 理论基础
1.1 Isaac Sim框架概述
Isaac Sim是NVIDIA基于Omniverse构建的机器人仿真平台,它提供了:
- 物理仿真引擎:基于PhysX的高精度物理计算
- 渲染引擎:实时光线追踪和材质渲染
- 机器人框架:支持多种机器人模型和传感器
- AI集成:与深度学习框架无缝集成
1.2 CortexWorld核心概念
CortexWorld是Isaac Sim中的世界管理器,负责:
- 场景管理:协调所有仿真对象
- 时间同步:确保物理仿真和渲染同步
- 生命周期管理:处理对象的创建、更新和销毁
- 事件系统:管理仿真中的各种事件
1.3 Franka机械臂简介
Franka Emika Panda是一款7自由度协作机械臂,特点:
- 7个旋转关节,提供高灵活性
- 力控制能力,适合精细操作
- 安全协作,可与人类共同工作
2. 代码实现详解
2.1 导入和初始化设置
python
import argparse
from isaacsim import SimulationApp
# 创建参数解析器
parser = argparse.ArgumentParser("franka_examples")
parser.add_argument(
"--behavior",
type=str,
default="block_stacking_behavior",
help="Which behavior to run. See behavior/franka for available behavior files.",
)
args, _ = parser.parse_known_args()
# 创建仿真应用实例
simulation_app = SimulationApp({"headless": False})关键点解析:
SimulationApp是Isaac Sim的核心应用类{"headless": False}表示启用GUI界面- 参数解析允许选择不同的机械臂行为
2.2 核心组件导入
python
import numpy as np
from behaviors.franka.franka_behaviors import ContextStateMonitor, behaviors
from isaacsim.core.api.objects import DynamicCuboid, VisualCuboid
from isaacsim.cortex.framework.cortex_utils import load_behavior_module
from isaacsim.cortex.framework.cortex_world import Behavior, CortexWorld, LogicalStateMonitor
from isaacsim.cortex.framework.robot import add_franka_to_stage
from isaacsim.cortex.framework.tools import SteadyRate重要API说明:
CortexWorld:世界管理器add_franka_to_stage:添加Franka机械臂的工厂函数DynamicCuboid:动态物理方块对象ContextStateMonitor:状态监控器
2.3 世界创建与机械臂添加
python
def main():
# 创建Cortex世界实例
world = CortexWorld()
# 创建上下文状态监控器
context_monitor = ContextStateMonitor(print_dt=0.25)
# 添加Franka机械臂到世界
robot = world.add_robot(add_franka_to_stage(name="franka", prim_path="/World/Franka"))核心流程:
- 世界实例化:创建仿真世界容器
- 监控器设置:每0.25秒打印一次状态信息
- 机械臂注册:将Franka机械臂添加到指定路径
3. 第一阶段实践代码
让我们创建一个简化版本,专注于环境搭建和机械臂加载:
python
# stage1_basic_setup.py
import argparse
from isaacsim import SimulationApp
def main():
# 1. 初始化仿真应用
simulation_app = SimulationApp({"headless": False})
# 2. 导入必要组件(需要在SimulationApp创建后导入)
from isaacsim.cortex.framework.cortex_world import CortexWorld
from isaacsim.cortex.framework.robot import add_franka_to_stage
# 3. 创建世界实例
print("Creating CortexWorld...")
world = CortexWorld()
# 4. 添加Franka机械臂
print("Adding Franka robot to stage...")
robot = world.add_robot(
add_franka_to_stage(
name="franka",
prim_path="/World/Franka"
)
)
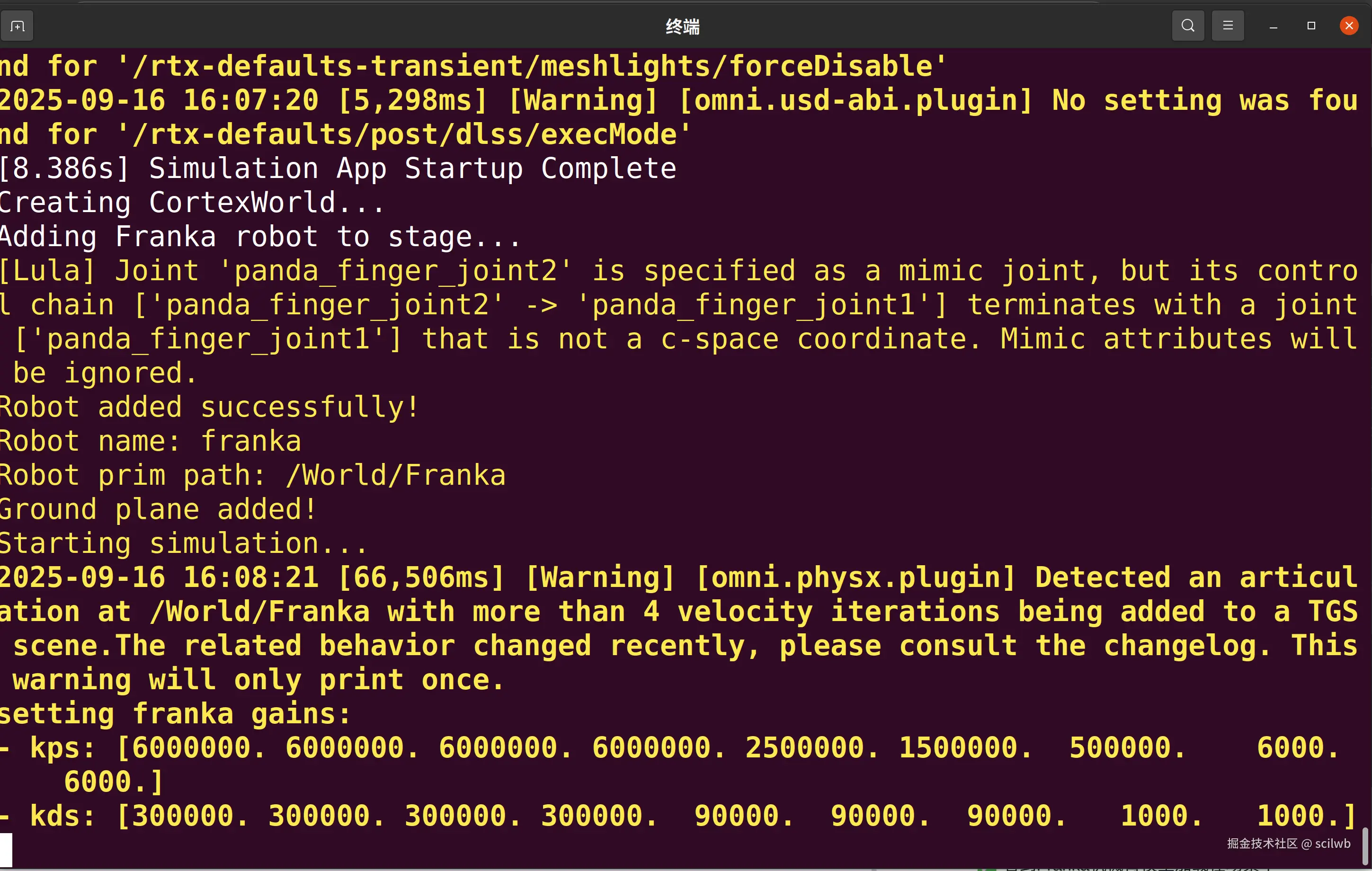
print("Robot added successfully!")
print(f"Robot name: {robot.name}")
print(f"Robot prim path: {robot.prim_path}")
# 5. 添加基础地面
world.scene.add_default_ground_plane()
print("Ground plane added!")
# 6. 启动仿真
print("Starting simulation...")
world.run(simulation_app)
# 7. 清理资源
simulation_app.close()
print("Simulation closed.")
if __name__ == "__main__":
main()4. 测试验证
4.1 运行测试
bash
#笔者文件路径为/home/lwb/Project/CleanUp_Bench_SVSDF/franka/stage1_basic_setup.py
#运行步骤如下
conda activate isaaclab_4_5_0
cd ~/isaacsim
source setup_conda_env.sh
cd ~/Project/CleanUp_Bench_SVSDF/franka/
python stage1_basic_setup.py4.2 预期效果
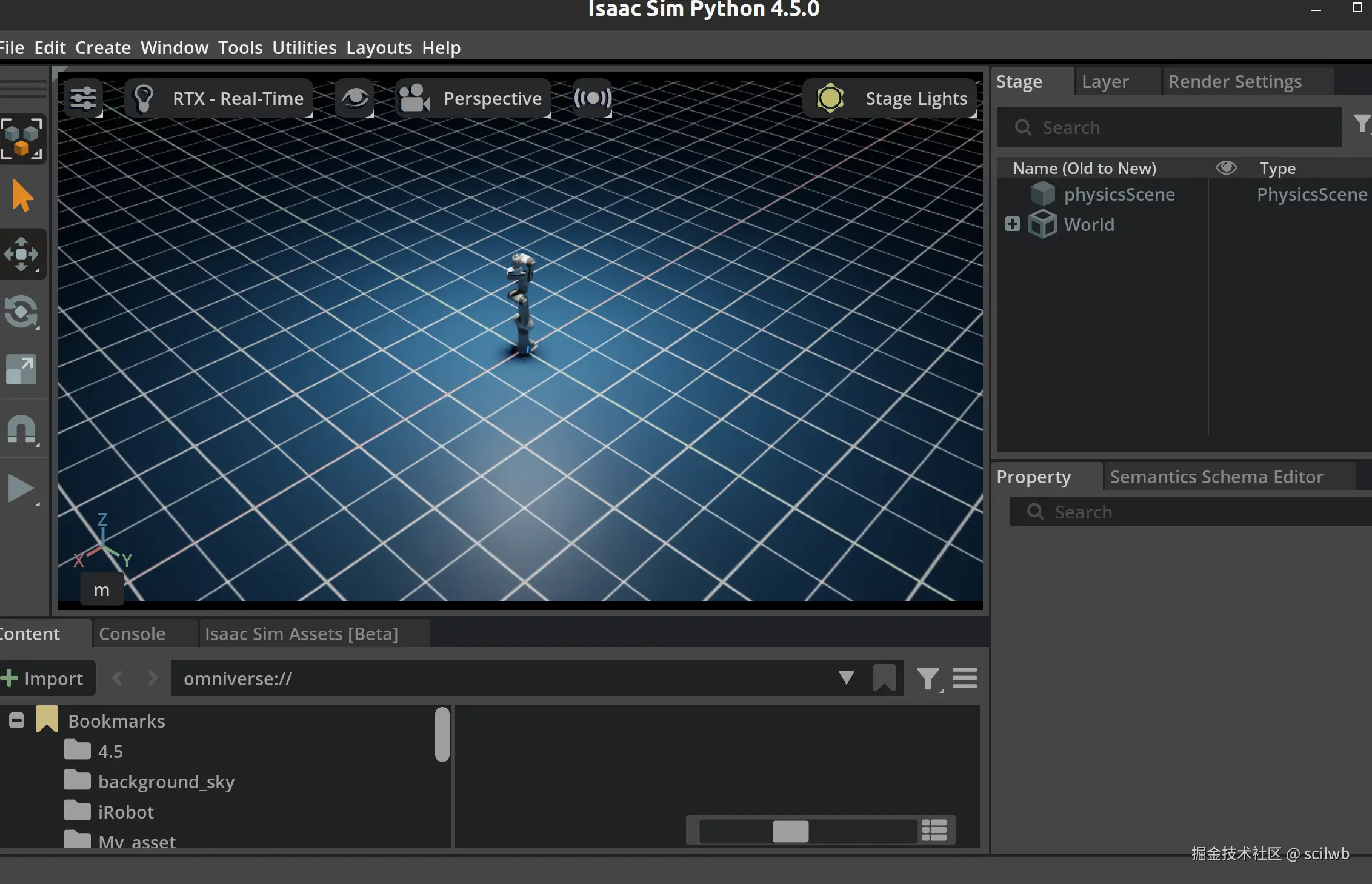
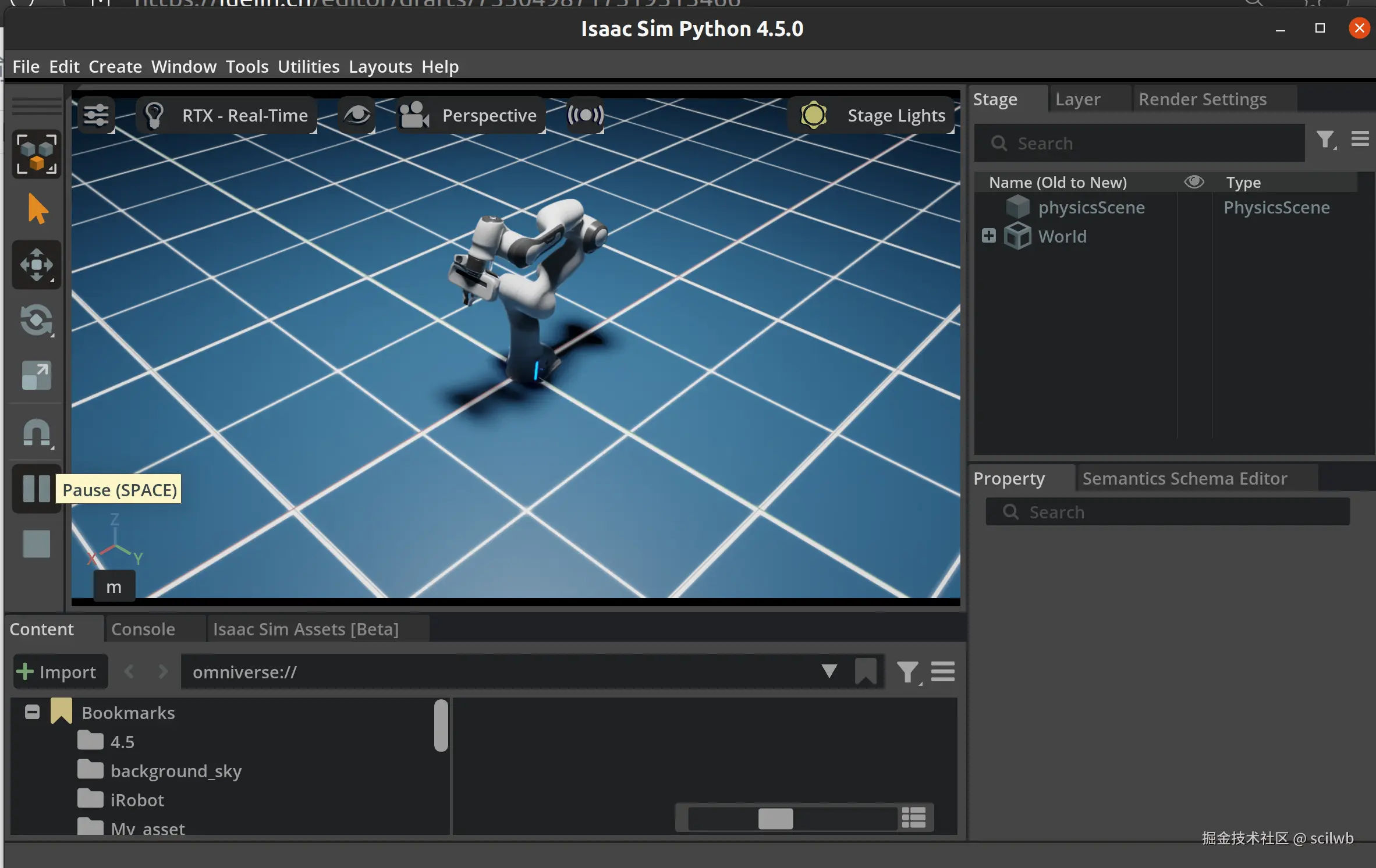
- ✅ Isaac Sim窗口成功打开
- ✅ 看到Franka机械臂模型加载在场景中
- ✅ play后机械臂处于默认姿态
- ✅ 地面平面正确显示
- ✅ 控制台输出相关信息
4.3 常见问题排查
问题1:ImportError相关错误
python
# 解决方案:确保导入顺序正确
simulation_app = SimulationApp({"headless": False})
# 所有isaac相关导入必须在SimulationApp创建后问题2:机械臂显示异常
python
# 检查路径设置
robot = world.add_robot(
add_franka_to_stage(
name="franka",
prim_path="/World/Franka" # 确保路径唯一且有效
)
)5. 扩展练习
5.1 修改机械臂位置
python
# 在add_franka_to_stage函数中添加position参数
robot = world.add_robot(
add_franka_to_stage(
name="franka",
prim_path="/World/Franka",
position=[0.0, 0.0, 1.0] # x, y, z坐标
)
)5.2 添加多个机械臂
python
# 创建两个机械臂
robot1 = world.add_robot(
add_franka_to_stage(name="franka1", prim_path="/World/Franka1")
)
robot2 = world.add_robot(
add_franka_to_stage(name="franka2", prim_path="/World/Franka2")
)6. 小结
在第一阶段,我们学习了:
理论方面:
- Isaac Sim的基本架构和概念
- CortexWorld的作用和重要性
- Franka机械臂的特点
实践方面:
- 正确的初始化流程
- 机械臂的添加方法
- 基本的仿真运行框架
关键要点:
- SimulationApp必须最先创建
- Isaac相关导入要在SimulationApp之后
- 路径管理的重要性
下一篇讲述第二阶段:场景构建与物体创建!