目录
[1 -> 概述](#1 -> 概述)
[2 -> 技术架构概览](#2 -> 技术架构概览)
[2.1 -> 底层算法层](#2.1 -> 底层算法层)
[2.2 -> 引擎服务层](#2.2 -> 引擎服务层)
[2.3 -> Unity SDK层](#2.3 -> Unity SDK层)
[3 -> 核心算法深度解析](#3 -> 核心算法深度解析)
[3.1 -> 手部检测算法](#3.1 -> 手部检测算法)
[3.2 -> 手骨关键点检测](#3.2 -> 手骨关键点检测)
[3.3 -> 手势分类逻辑](#3.3 -> 手势分类逻辑)
[4 -> Unity SDK源码深度分析](#4 -> Unity SDK源码深度分析)
[4.1 -> RKInput 输入管理系统](#4.1 -> RKInput 输入管理系统)
[4.2 -> RKHand 手部交互组件](#4.2 -> RKHand 手部交互组件)
[4.3 -> 远近场交互切换机制](#4.3 -> 远近场交互切换机制)
[4.4 -> 手势事件系统](#4.4 -> 手势事件系统)
[5 -> 性能优化策略](#5 -> 性能优化策略)
[5.1 -> 模型推理优化](#5.1 -> 模型推理优化)
[5.2 -> 渲染优化](#5.2 -> 渲染优化)
[5.3 -> 内存管理](#5.3 -> 内存管理)
[6 -> 高级特性与自定义扩展](#6 -> 高级特性与自定义扩展)
[6.1 -> 自定义手势识别](#6.1 -> 自定义手势识别)
[6.2 -> 多模态融合](#6.2 -> 多模态融合)
[7 -> 实战应用案例](#7 -> 实战应用案例)
[7.1 -> 3D 物体操控](#7.1 -> 3D 物体操控)
[7.2 -> UI 交互优化](#7.2 -> UI 交互优化)
[8 -> 技术挑战与解决方案](#8 -> 技术挑战与解决方案)
[8.1 -> 遮挡处理](#8.1 -> 遮挡处理)
[8.2 -> 光照适应性](#8.2 -> 光照适应性)
[9 -> 未来演进方向](#9 -> 未来演进方向)
[10 -> 结语](#10 -> 结语)

1 -> 概述
Rokid 作为国内 AR 领域的领军企业,其手势识别技术在多代产品中不断演进,为开发者提供了强大的自然交互能力。本文将深入剖析 Rokid 手势识别的技术架构,结合 Unity SDK 源码,从底层算法到上层应用进行全面解析。
2 -> 技术架构概览
Rokid 手势识别系统采用分层架构设计,从下至上包括:
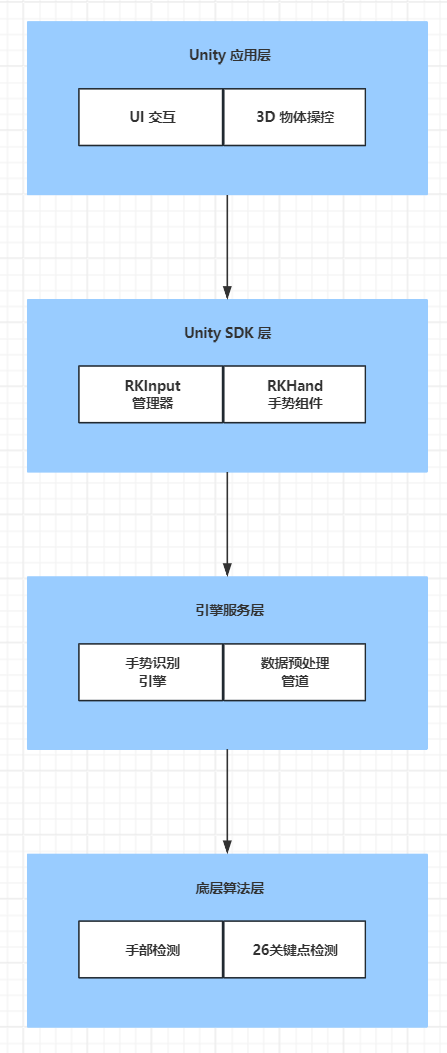
2.1 -> 底层算法层
-
手部检测与追踪:基于深度学习的手部边界框检测
-
26点手骨关键点检测:精确识别手部关节位置
-
手势分类算法:实时识别预定义手势状态
-
位姿估计算法:计算手部的3D空间位置和朝向
2.2 -> 引擎服务层
-
手势识别引擎:C++ 核心处理模块
-
数据预处理管道:图像标准化、数据增强
-
模型推理优化:针对移动端的神经网络加速
2.3 -> Unity SDK层
-
RKInput 管理器:统一的多模态输入管理
-
RKHand 组件:手部渲染与交互逻辑
-
事件系统:手势事件的传递与处理
3 -> 核心算法深度解析
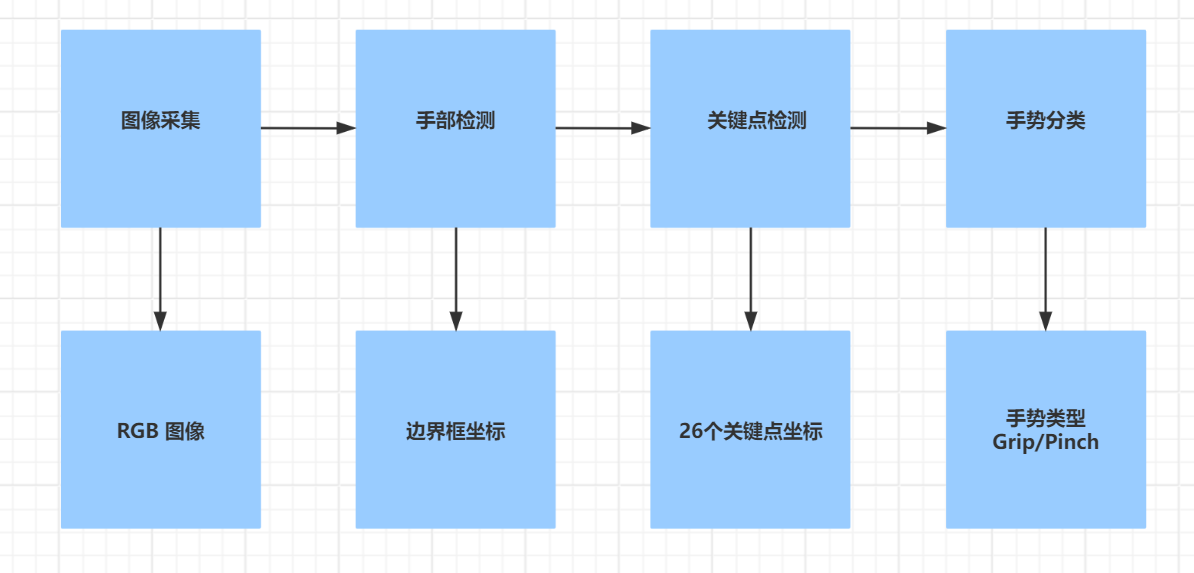
3.1 -> 手部检测算法
Rokid 采用轻量级 YOLOv4-tiny 改进版本进行手部检测:
cpp
// 手部检测流程
class HandDetector {
public:
DetectionResult detect(const cv::Mat& frame) {
// 图像预处理
cv::Mat preprocessed = preprocess(frame);
// 神经网络推理
float* output = network.inference(preprocessed);
// 后处理 - 非极大值抑制
vector<BoundingBox> boxes = nms(output, confidence_threshold);
return {boxes, frame.size()};
}
};关键优化点:
-
输入分辨率:416×416,平衡精度与速度
-
Anchor设计:针对手部比例优化预定义框
-
量化策略:INT8 量化减少模型体积
3.2 -> 手骨关键点检测
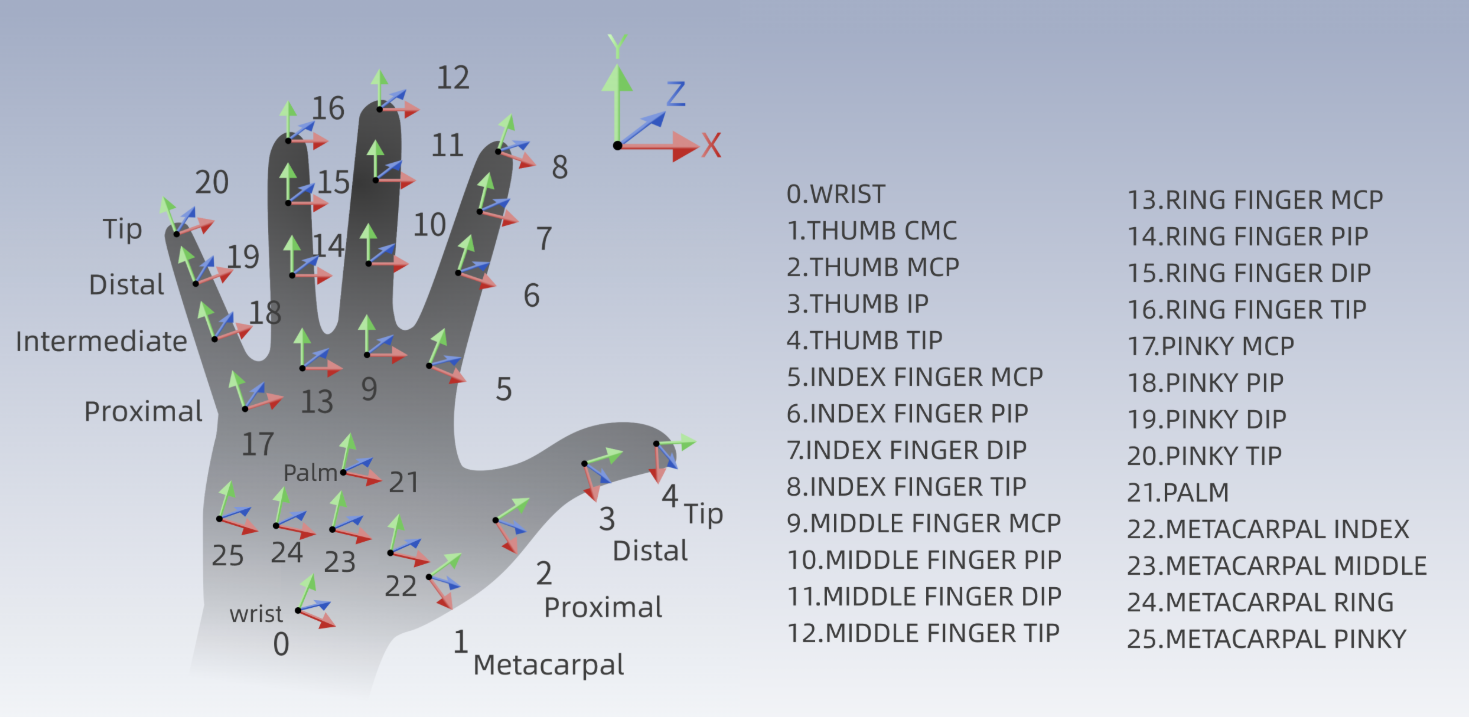
基于 Heatmap 回归的 26 点关键点检测:
cpp
class HandLandmarkDetector {
private:
const int NUM_KEYPOINTS = 26;
const int HEATMAP_SIZE = 64;
public:
vector<KeyPoint> estimate(const cv::Mat& hand_roi) {
// 生成26个通道的Heatmap
vector<cv::Mat> heatmaps = model.predict(hand_roi);
vector<KeyPoint> keypoints;
for (int i = 0; i < NUM_KEYPOINTS; i++) {
// 寻找Heatmap极值点
Point2f max_loc = findMaxLocation(heatmaps[i]);
// 亚像素精度优化
KeyPoint kp = refineKeyPoint(max_loc, heatmaps[i]);
keypoints.push_back(kp);
}
return keypoints;
}
};技术亮点:
-
Encoder-Decoder 架构:保持空间分辨率的同时提取深层特征
-
Coordinate Decoding:基于热力图的最大值位置提取关键点坐标
-
多任务学习:同时预测关键点位置和手部存在置信度
3.3 -> 手势分类逻辑
基于关键点空间关系的状态机分类:
cpp
// Unity SDK中的手势分类实现
public enum GestureType {
None = -1,
Grip = 1, // 握拳
Palm = 2, // 手掌
Pinch = 3, // 捏合
OpenPinch = 4 // 捏合松开
}
public class GestureClassifier {
public GestureType Classify(List<Vector3> keypoints) {
// 计算手指弯曲角度
float thumbAngle = CalculateFingerAngle(keypoints, FingerType.Thumb);
float indexAngle = CalculateFingerAngle(keypoints, FingerType.Index);
// 基于角度阈值分类
if (thumbAngle < 30f && indexAngle < 25f) {
return GestureType.Pinch;
} else if (AllFingersBent(keypoints)) {
return GestureType.Grip;
} else if (AllFingersExtended(keypoints)) {
return GestureType.Palm;
}
return GestureType.None;
}
}4 -> Unity SDK源码深度分析
4.1 -> RKInput 输入管理系统
作为多模态输入的统一入口,RKInput 采用模块化设计:
cpp
// Assets/Rokid/UXR/Scripts/Input/RKInput.cs
public class RKInput : MonoBehaviour {
[SerializeField] private InputModuleType defaultInitModule = InputModuleType.Gesture;
[SerializeField] private InputModuleType defaultActiveModule = InputModuleType.Gesture;
private InputModuleManager moduleManager;
private Dictionary<InputModuleType, IInputModule> modules;
void Start() {
InitializeModules();
ActivateDefaultModule();
}
private void InitializeModules() {
modules = new Dictionary<InputModuleType, IInputModule>();
// 动态加载预配置的输入模块
if (defaultInitModule.HasFlag(InputModuleType.Gesture)) {
var gestureModule = gameObject.AddComponent<GestureInputModule>();
modules[InputModuleType.Gesture] = gestureModule;
}
// 其他模块初始化...
}
}4.2 -> RKHand 手部交互组件
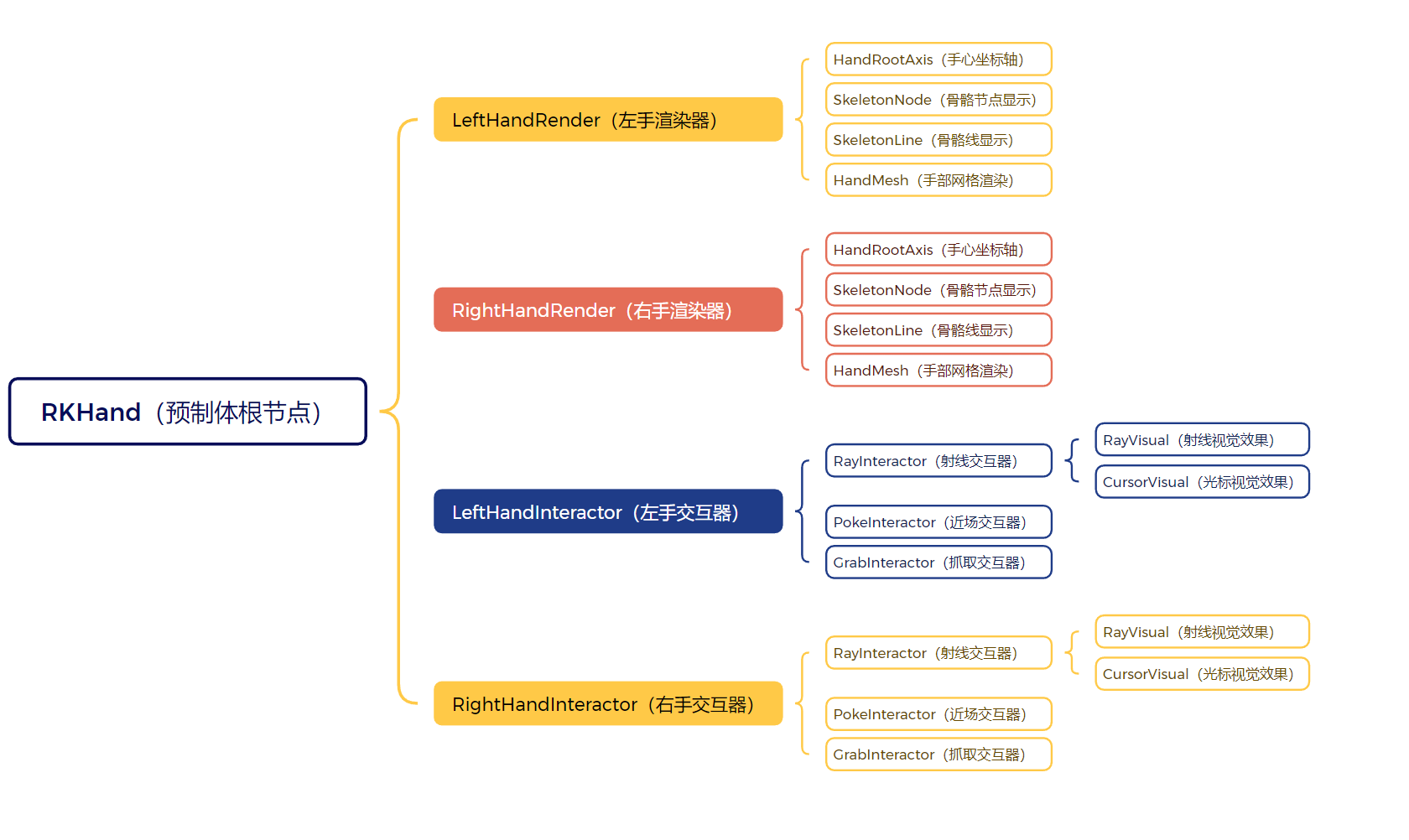
RKHand 是手势交互的核心,实现远近场无缝切换:
cpp
// Assets/Rokid/UXR/Scripts/Hand/RKHand.cs
public class RKHand : MonoBehaviour {
[SerializeField] private HandType handType = HandType.RightHand;
[SerializeField] private HandRender handRender;
[SerializeField] private ModuleInteractor moduleInteractor;
// 关键组件引用
private RayInteractor rayInteractor;
private PokeInteractor pokeInteractor;
private InteractorStateChange stateChange;
void Update() {
UpdateHandPose();
UpdateInteractorState();
}
private void UpdateHandPose() {
// 从手势引擎获取最新手部数据
var handData = GesEventInput.Instance.GetHandData(handType);
if (handData.isValid) {
transform.position = handData.position;
transform.rotation = handData.rotation;
UpdateSkeletonPose(handData.keypoints);
}
}
}4.3 -> 远近场交互切换机制
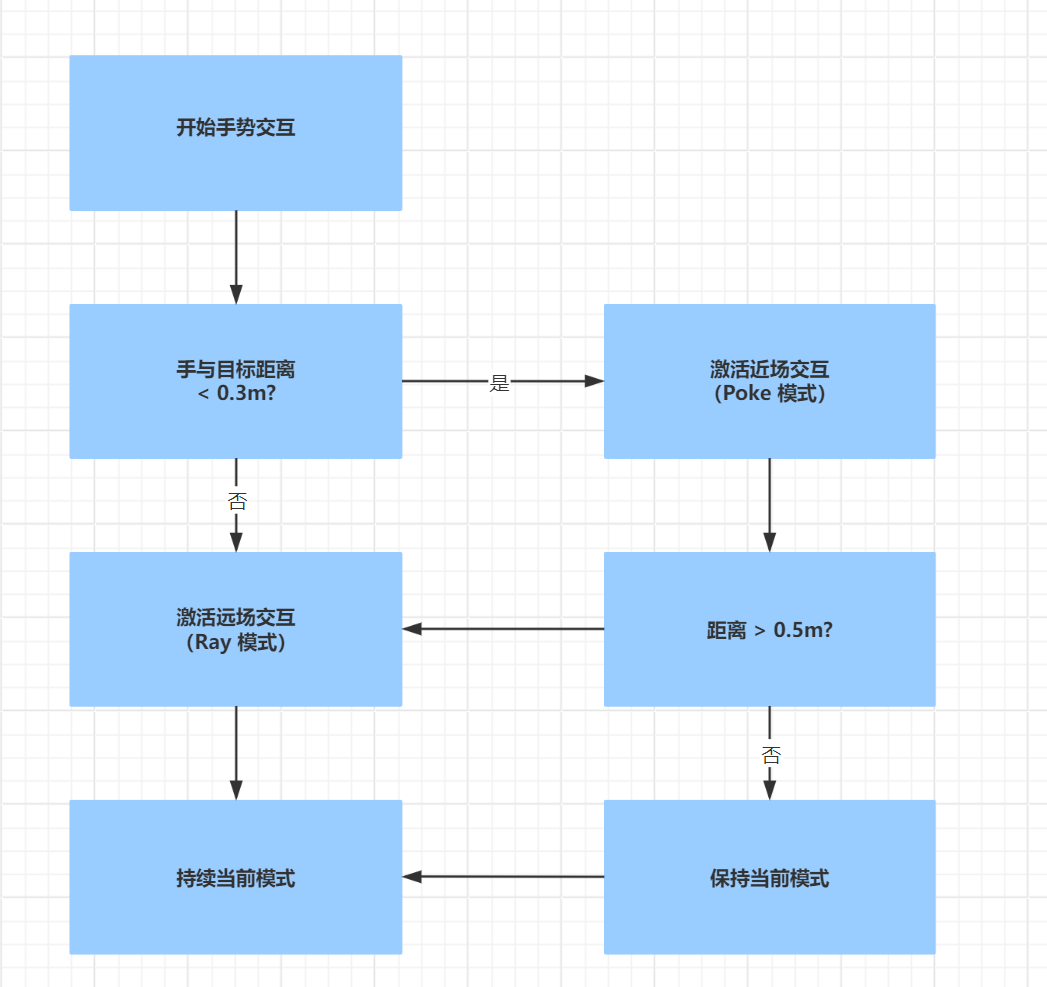
基于 InteractorStateChange 的状态管理:
cpp
// Assets/Rokid/UXR/Scripts/Interaction/InteractorStateChange.cs
public class InteractorStateChange : MonoBehaviour {
[SerializeField] private float nearFieldThreshold = 0.3f;
private bool isFarField = true;
private PokeInteractor pokeInteractor;
private RayInteractor rayInteractor;
public void OnPokeInteractorHover() {
// 切换到近场交互
if (isFarField) {
rayInteractor.SetActive(false);
pokeInteractor.SetActive(true);
isFarField = false;
}
}
public void OnPokeInteractorUnHover() {
// 切换回远场交互
if (!isFarField) {
pokeInteractor.SetActive(false);
rayInteractor.SetActive(true);
isFarField = true;
}
}
}4.4 -> 手势事件系统
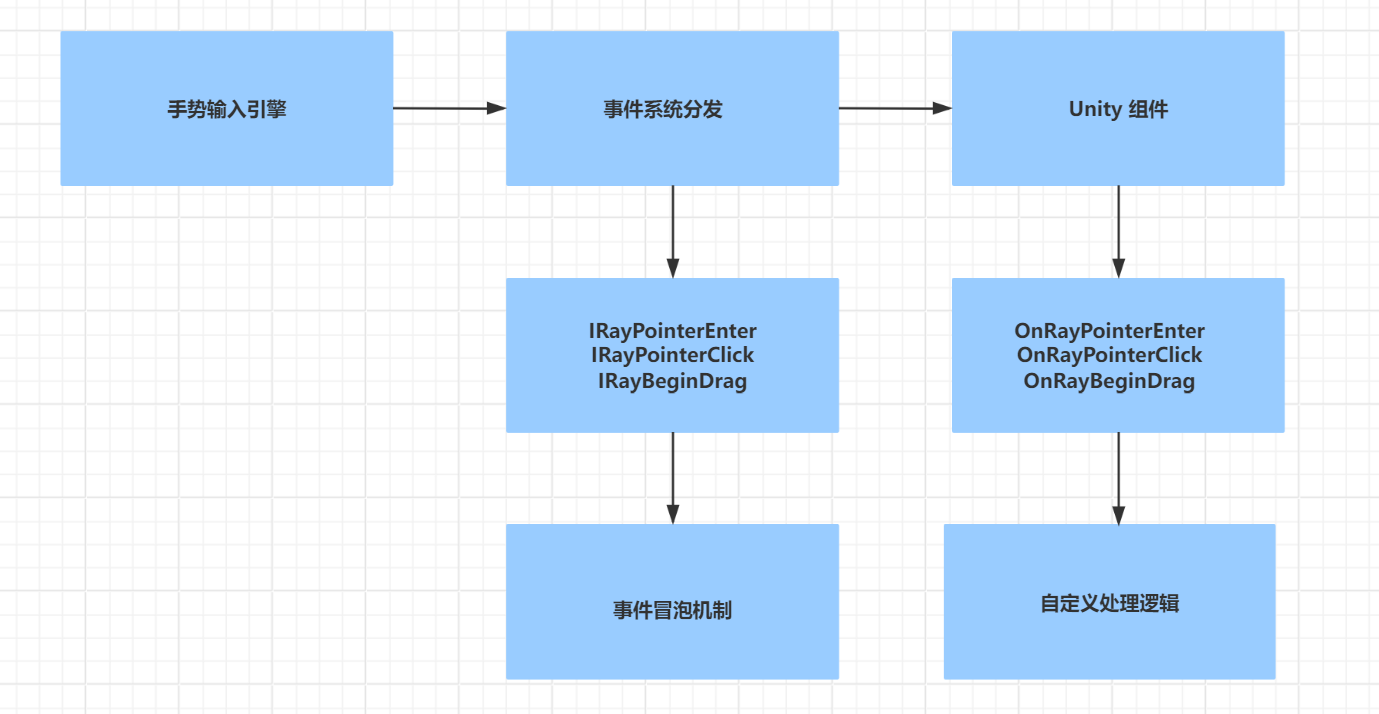
扩展 Unity 原生事件系统,支持 3D 交互:
cpp
// Assets/Rokid/UXR/Scripts/Interaction/Interfaces/IRayInterfaces.cs
public interface IRayPointerEnter : IEventSystemHandler {
void OnRayPointerEnter(PointerEventData eventData);
}
public interface IRayPointerClick : IEventSystemHandler {
void OnRayPointerClick(PointerEventData eventData);
}
// 具体实现示例
public class CustomRayInteractable : MonoBehaviour,
IRayPointerEnter,
IRayPointerClick {
public void OnRayPointerEnter(PointerEventData eventData) {
Debug.Log($"Ray entered: {gameObject.name}");
// 高亮反馈
}
public void OnRayPointerClick(PointerEventData eventData) {
Debug.Log($"Ray clicked: {gameObject.name}");
// 点击逻辑
}
}5 -> 性能优化策略
5.1 -> 模型推理优化
-
分层推理:检测与关键点分步执行,降低计算负载
-
动态帧率:根据系统负载调整识别频率
-
ROI 缓存:连续帧间手部区域缓存,减少全图检测
5.2 -> 渲染优化
cpp
// 手部Mesh LOD控制
public class HandRender : MonoBehaviour {
private SkinnedMeshRenderer handMesh;
private float[] lodDistances = { 0.5f, 1.0f, 2.0f };
private int[] polyCounts = { 2000, 1000, 500 };
void UpdateLOD() {
float distance = Vector3.Distance(transform.position,
Camera.main.transform.position);
for (int i = 0; i < lodDistances.Length; i++) {
if (distance < lodDistances[i]) {
handMesh.mesh = GetLODMesh(polyCounts[i]);
break;
}
}
}
}5.3 -> 内存管理
-
对象池:交互器对象重复使用
-
资源异步加载:手势模型按需加载
-
事件回收:避免事件监听器泄漏
6 -> 高级特性与自定义扩展
6.1 -> 自定义手势识别
基于骨骼数据的自定义手势检测:
cpp
public class CustomGestureDetector {
public bool DetectThumbsUp(HandType handType) {
var thumbTip = GesEventInput.Instance.GetSkeletonPose(
SkeletonIndexFlag.THUMB_TIP, handType);
var indexTip = GesEventInput.Instance.GetSkeletonPose(
SkeletonIndexFlag.INDEX_FINGER_TIP, handType);
// 拇指向上且其他手指弯曲
return thumbTip.position.y > indexTip.position.y &&
CheckFingersCurl(handType, excludeThumb: true);
}
private bool CheckFingersCurl(HandType handType, bool excludeThumb) {
// 基于关键点角度计算手指弯曲程度
// 实现细节...
}
}6.2 -> 多模态融合
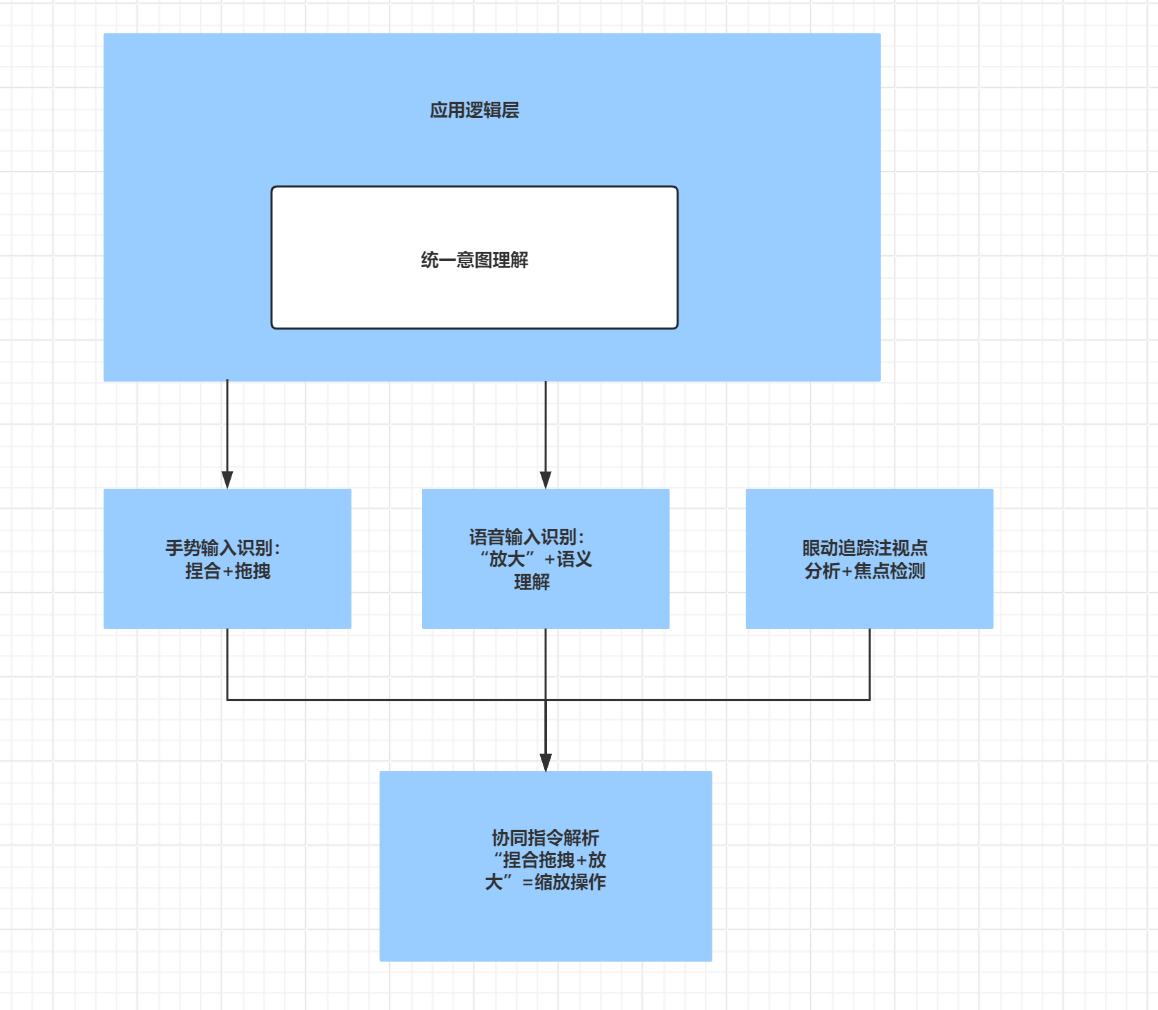
手势与语音、控制器输入的协同:
cpp
public class MultiModalManager : MonoBehaviour {
private void Update() {
// 手势优先级判断
if (IsHandInView()) {
SwitchToGestureInput();
} else if (IsControllerActive()) {
SwitchToControllerInput();
}
// 手势+语音组合命令
if (IsPinchGesture() && IsVoiceCommand("放大")) {
ExecuteZoomIn();
}
}
}7 -> 实战应用案例
7.1 -> 3D 物体操控
cpp
public class ObjectManipulator : MonoBehaviour,
IRayBeginDrag,
IRayDragToTarget,
IRayEndDrag {
private Vector3 dragStartPosition;
private bool isDragging = false;
public void OnRayBeginDrag(PointerEventData eventData) {
dragStartPosition = transform.position;
isDragging = true;
}
public void OnRayDragToTarget(Vector3 targetPoint) {
if (isDragging) {
transform.position = targetPoint;
}
}
public void OnRayEndDrag(PointerEventData eventData) {
isDragging = false;
}
}7.2 -> UI 交互优化
cpp
public class AdvancedPointableUI : PointableCanvas {
[SerializeField] private float hoverScaleFactor = 1.1f;
[SerializeField] private float animationDuration = 0.2f;
protected override void OnRayPointerEnter(PointerEventData eventData) {
base.OnRayPointerEnter(eventData);
StartCoroutine(ScaleAnimation(hoverScaleFactor));
}
protected override void OnRayPointerExit(PointerEventData eventData) {
base.OnRayPointerExit(eventData);
StartCoroutine(ScaleAnimation(1.0f));
}
}8 -> 技术挑战与解决方案
8.1 -> 遮挡处理
-
部分遮挡推理:基于可见关键点推测完整手型
-
时序连续性:利用帧间一致性填补缺失数据
-
多手分离:通过空间关系区分重叠手部
8.2 -> 光照适应性
-
数据增强训练:包含各种光照条件的训练数据
-
实时白平衡:图像预处理中的自动色彩校正
-
模型鲁棒性:对亮度变化不敏感的网络结构
9 -> 未来演进方向
-
更精细的手势识别:支持手指微动作、双手复杂交互
-
语义理解:结合上下文理解手势意图
-
跨设备协同:多设备间手势交互无缝切换
-
个性化适配:基于用户习惯的自适应识别
10 -> 结语
Rokid 手势识别技术通过深度学习算法与精心设计的 Unity SDK 架构,为开发者提供了强大而灵活的自然交互能力。从底层的21点关键点检测到上层的多模态输入管理,整个技术栈体现了工程优化与用户体验的深度结合。
随着 AR/VR 技术的不断发展,手势交互必将成为人机交互的重要方式。Rokid 通过开源其 SDK 和持续的技术迭代,正在推动整个生态的繁荣发展。对于开发者而言,深入理解其技术原理和实现细节,将有助于打造更加自然、沉浸的交互体验。
本文基于 Rokid UXR SDK 3.0 版本分析,具体实现可能随版本更新而变化。建议开发者参考官方最新文档和源码获取最准确的信息。
感谢各位大佬支持!!!
互三啦!!!