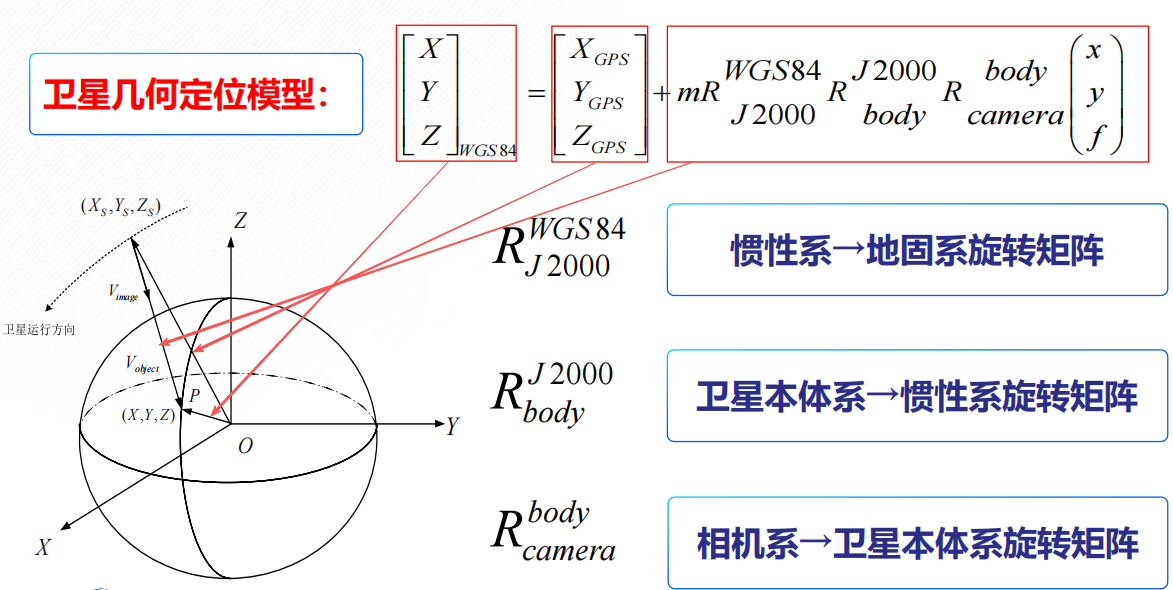
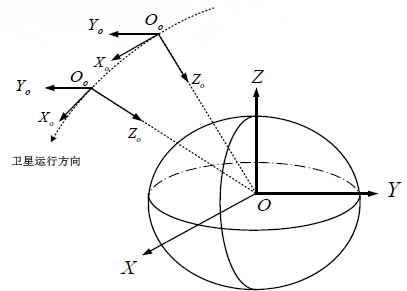
卫星几何定位模型
这实际上描述了一个空间几何关系:
📷 地面像点(X,Y,Z)在地心坐标系下的位置
= 卫星质心位置 + 卫星相机光线方向(在地固系下)× 比例因子 m
换句话说:
构建卫星影像像方二维坐标到物方三维坐标的****物理模型,实现几何定位。
相机拍到的像素点,对应的光线(由相机坐标确定方向)经过多次坐标变换,被投影到地球表面,就得到该像素的地理位置
卫星质心在GPS下的坐标,这就是卫星在成像时刻的空间位置。由 定轨结果 提供
像点在相机坐标系下的坐标, 这定义了光线在相机坐标系下的方向向量。
-
x,y:像平面坐标(通常通过成像几何模型或相机内参获得)
-
f:焦距(相机主点到像平面的距离)
这是相机坐标系 → 卫星机体坐标系的旋转矩阵,说明相机的安装姿态,例如相机光轴相对于卫星本体的俯仰、偏航、滚转角。由定标(外方位标定)确定
卫星机体坐标系 → 惯性坐标系(J2000) 的旋转矩阵,这表示卫星在成像时的姿态(即卫星朝向哪儿拍)。由定姿结果(星敏感器、陀螺仪)给出
惯性坐标系(J2000) → 地固坐标系(WGS-84) 的旋转矩阵,与地球自转、岁差、章动有关
这是一个标准地球模型转换,由时间参数确定。
比例因子(或射线延伸系数),表示从相机出发沿光线方向延伸多远才能与地球相交。通过"相交地球椭球模型"求得。即确定光线与地球表面的交点。
定轨---定姿---定标
| 环节 | 对应参数 | 含义 | 数据来源 |
|---|---|---|---|
| 🛰️ 定轨 | (X_{GPS}, Y_{GPS}, Z_{GPS}) | 确定卫星在地固系下的位置 | GPS / 星历数据 |
| 🔭 定姿 | (R^{J2000}_{body}) | 确定卫星在惯性系中的姿态 | 星敏感器 / 陀螺仪 |
| 📷 定标 | (R^{body}_{camera}),(f),内参 | 描述相机相对卫星的安装误差 | 地面标定 / 实测 |
| 🌎 坐标变换 | (R^{WGS84}_{J2000}) | 将惯性系姿态转换到地固系 | 地球模型计算 |
| 📍 地面定位 | (m) 求解 | 光线与地球相交求交点 | 数值求解 |
-
卫星在轨道上(定轨) → 得到其在 WGS-84 系下的坐标
-
卫星姿态传感器(定姿) → 得到机体在 J2000 系中的朝向
-
相机安装矩阵(定标) → 得到相机相对机体方向
-
三个旋转矩阵连乘,将相机视线方向转到地固坐标系
-
光线方向 × 比例因子 m,加上卫星位置,就得地面点的坐标
基本坐标系
像平面坐标系**:包括图像坐标系和焦面坐标系,描述像方点的二维坐标。**
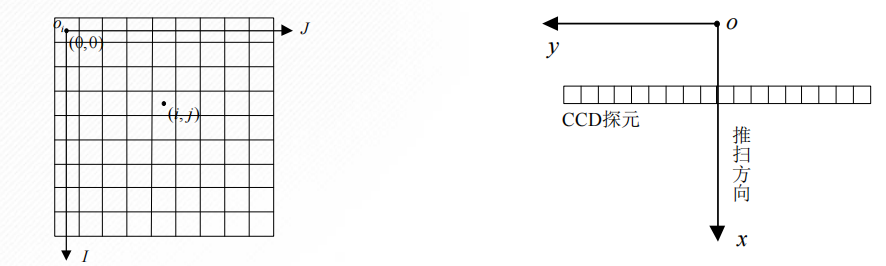
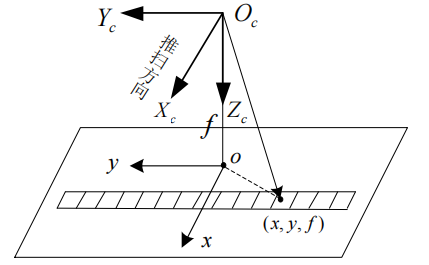
传感器坐标系**:即相机坐标系,描述像方点的三维坐标。**
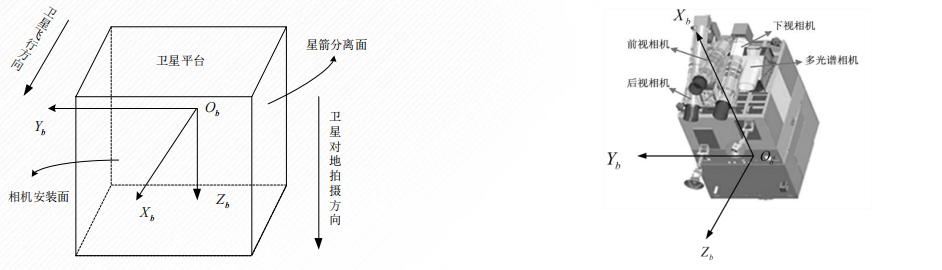
卫星本体坐标系**:基于整颗卫星构建的参考坐标系,星上各传感器的坐标基准**
轨道坐标系**:一种瞬时坐标系,多用于坐标之间的过渡、转换。**
指向角模型
1. 起点:理想的严格物理模型
在理想情况下,我们使用针孔相机模型。一个像素 (x, y) 在相机坐标系中的方向向量是:
[x, y, f]^T
这个向量可以通过旋转和平移,转换到地球坐标系,从而进行定位。
2. 问题:现实世界的复杂性
现实中的相机远非理想:
-
镜头畸变 :导致光线弯曲,使得实际像点位置
(x+Δx, y+Δy)偏离理想位置(x, y)。 -
探测器安装误差:探测器的阵列可能不是完美的平面,或者与光轴不完全垂直。
-
主点偏移 :光轴与探测器平面的交点(主点)可能不在坐标原点
(0,0),而在(x₀, y₀)。
因此,第一个公式引入了这些修正:
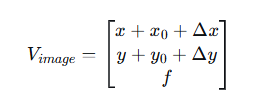
-
x, y:探元的理想坐标。 -
x₀, y₀:主点偏移。 -
Δx, Δy:由镜头畸变引起的修正量。 -
f:焦距。
这个模型虽然精确,但参数过多且耦合紧密 (例如,主点偏移和某些畸变参数效应相似),导致在轨标定时非常困难,容易产生不稳定的解,这就是所谓的"过度参数化、无法精确标定"的问题。
3. 解决方案:指向角模型
为了规避上述问题,工程师们想出了一个更聪明的方法:绕过所有复杂的内部物理参数,直接测量和建模每个探元的最终输出------它在惯性空间中的指向角度。
演变的关键一步是归一化:
我们将方向向量除以焦距 f,得到一个新的向量,其Z分量为1:

这个近似成立是因为**x₀, y₀, Δx, Δy** 相对于**f** 都是小量。这个向量的X和Y分量,在几何上恰好等于指向角正切值:

这里,ψₓ 和 ψ_y 就是指向角。
-
ψₓ:光线在X-Z平面上的投影与Z轴的夹角。 -
ψ_y:光线在Y-Z平面上的投影与Z轴的夹角。 -
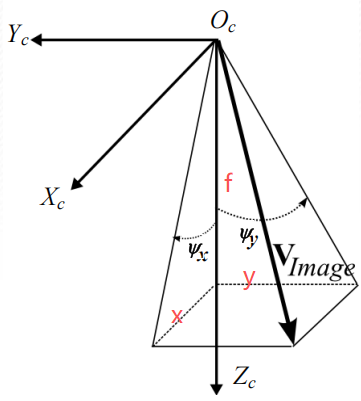
至此,我们成功地将问题从"求解一堆难以分离的内部几何参数"转变为了"直接为每个探元标定其唯一的指向角"。
核心模型公式

这个公式描述的是指向角随探元号变化的规律。
-
s(探元号):-
含义:探测器上每个敏感单元的编号。对于线阵推扫式卫星相机,这通常是从一端到另一端(例如,从0到11999)的序列号。
-
作用:自变量。模型认为,一个探元的指向角主要由它在探测器上的位置决定。
-
-
ψₓ(s),ψ_y(s):-
含义 :探元号
s所对应的探测单元,其光线的指向角。 -
单位:通常是弧度。
-
作用:因变量。这是我们最终要得到的量,用于构建几何定位模型。
-
-
多项式系数
ax₀, ax₁, ax₂, ax₃, ay₀, ay₁, ay₂, ay₃:-
含义 :描述指向角与探元号之间函数关系的系数。这里使用了一个三次多项式来拟合这种关系。
-
为什么是三次多项式? 一次多项式(线性)只能描述均匀变化的视场;二次多项式可以描述对称的弯曲;三次多项式则能更好地拟合由于镜头畸变、探测器翘曲等引起的非对称、非线性的畸变。这在精度和复杂度之间取得了很好的平衡。
-
如何得到? 这些系数是通过在轨几何定标来确定的。具体方法是:让卫星拍摄已知精确地理坐标的地面控制点,然后通过平差计算,反演出能使所有控制点投影误差最小的这一组系数。
-
工作流程与优势总结
-
定标阶段:
-
卫星对已知控制点区域成像。
-
通过平差算法,解算出一组最优的指向角模型系数
(ax₀...ax₃, ay₀...ay₃)。 -
这些系数被固化,作为相机参数的一部分。
-
-
定位阶段:
-
对于图像中的任何一个像素(其探元号为
s),代入指向角模型,直接计算出它的指向角**ψₓ(s)** 和**ψy(s)。** -
根据**
tan(ψₓ)** 和tan(ψ_y)得到相机坐标系下的归一化方向向量(tan(ψₓ), tan(ψy), 1)。 -
后续流程不变:利用卫星的姿态和轨道数据,将这个方向向量转换到地固坐标系,与卫星位置向量结合,通过共线方程解算出地面点的精确坐标。
-
优势:
-
强健性:避免了物理模型参数之间的强相关性,解算更稳定。
-
精度高:直接对标最终几何定位精度,模型简单有效。
-
实用性强:非常适合于在轨标定和业务化处理。