相机帧与AOS帧的关系
相机帧(Camera Frame)
↓ 星上数据压缩
BPDU(图像数据包)
↓ 封装进虚信道(VCID)
VCDU 数据单元
↓ 再封装
AOS帧(用于传输)
↓ 下行传输至地面
一帧相机输出的数据(相机帧)会被打包成若干个 BPDU(Baseband PDU) ,然后这些 BPDU 会分布在多个 AOS帧 中下传。
换句话说:
一个相机帧通常 对应多个 AOS帧, 一个 AOS帧可能 只携带相机帧的一小部分(比如一条扫描线的一部分像元)。
简单来说:
📦 AOS帧负责"安全地打包传输";
📷 相机帧才是"真正的图像内容"。
相机帧的基本概念
对于线阵相机(也叫推扫式相机),它的工作方式是:
-
每一次卫星向前运动,相机只拍摄一行像元;
-
随着卫星不断前进,逐行扫描,就能拼成一幅完整影像。
因此,卫星每扫描一次,就会生成一条完整的"相机帧(Camera Frame) ",也叫一行数据(Line Data) 。
每一条帧数据中,都包含两部分:
-
辅助数据区(描述这一行的属性信息);
-
图像数据区(记录这一行每个像素的灰度值)。
注意,成像前时段应将前3秒辅助数据及成像后系统延时辅助数据进行缓存输出,以保证实时处理需求。
| 阶段 | 时间 | 原因 | 目的 |
|---|---|---|---|
| 成像前积累 | ~3 秒 | 建立时钟同步、姿态稳定、CCD预热 | 保证成像起始精度与信号稳定 |
| 成像后延时 | 若干秒 | 输出缓存、校验封包、结束同步 | 确保数据完整与封装正确 |
相机帧的结构组成
一条相机帧的结构可以写成这样:
┌───────────────────────────────────────────────┐
│ 帧头 │ 相机片号 │ 绝对行计数 │ 成像时间整秒 │ 成像时间微秒 │ 辅助数据 │ 图像数据 │
└───────────────────────────────────────────────┘
我们可以将它划分为两大部分:
(1)辅助数据区(metadata 或 header)
这是在每一行的灰度值前附带的信息。它告诉地面系统------
这行数据是何时、何地、由哪个相机、以什么状态拍摄的。
辅助数据区又包含几类内容:
| 字段 | 说明 |
|---|---|
| 帧头(Header) | 表示一行数据的开始,用于地面解码时的同步与定位。 |
| 相机片号 | 表示是哪个相机模块的数据(比如全色相机、WFV相机、不同视角相机等)。 |
| 绝对行计数 | 记录从相机开机或开始成像后每扫描一行所增加的计数(一般从0开始),保证行的顺序。 |
| 成像时间(整秒 + 微秒) | 精确标记这行数据的成像时刻,用于确定卫星此时的姿态与轨道位置。 |
| 辅助数据(Auxiliary Data) | 包含与成像状态相关的参数,比如积分时间、积分级数、相机增益、温度等。 |
(2)图像数据区(Image Data)
这一部分就是 CCD 探测器真实采集到的像元灰度值。
假设相机宽度是 12000 像元,那么图像数据区就是这 12000 个像元的数字值,表示地面上这条"成像行"的亮度。
通常每个像元用 10、12 或 16 bit 表示(即 0--1023 或 0--65535 的数值)。
如果是多光谱相机(有多个波段),那每一行的数据会包含多个谱段的像元值,可以按波段顺序排列(称为谱段1、谱段2......谱段n)。
辅助数据的意义
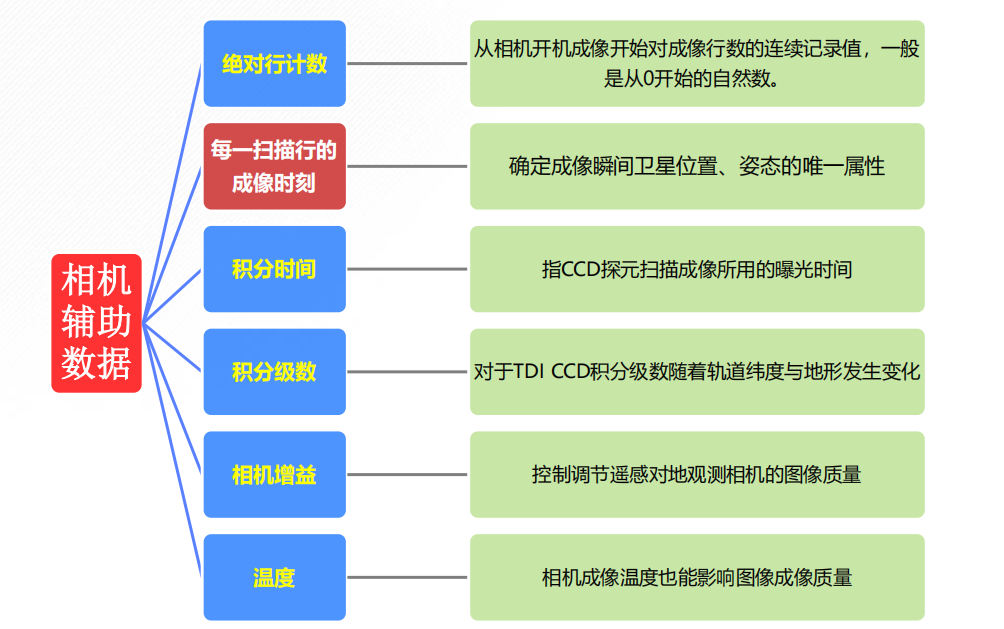
| 参数 | 含义 | 作用 |
|---|---|---|
| 绝对行计数 | 从相机启动后记录的连续行号(如0, 1, 2...) | 用来保证行的顺序和位置,用于影像拼接。 |
| 成像时间 | 每一行曝光的精确时间(整秒+微秒) | 用于确定这一行成像时刻的卫星姿态和位置,是几何校正的核心参数。 |
| 积分时间(Exposure time) | CCD探元曝光的持续时间 | 决定亮度与信噪比,曝光越长亮度越高。 |
| 积分级数(Integration level) | TDI CCD中叠加的级数 | TDI是"时间延迟积分",积分级数越高,信噪比越强。 |
| 相机增益(Gain) | 调节图像亮度的电子放大倍数 | 用于匹配地面反射强度差异,避免过曝或欠曝。 |
| 温度(Temperature) | 相机探测器温度 | 用于温度补偿,因为温度会影响 CCD 的噪声与灵敏度。 |
可以简单理解:
-
"绝对行计数 + 成像时间"确定"这一行"在空间和时间上的位置;
-
"积分时间、积分级数、增益、温度"保证"这一行"的成像质量。
地面接收站收到后,会根据:
-
绝对行计数 → 确定行顺序;
-
成像时间 → 确定地理位置;
-
相机参数(积分时间、温度等)→ 用于辐射校正;
-
图像数据 → 拼接为完整影像。