引言
这是Rust九九八十一难第12篇,也是多线程入门第二篇,介绍下Tokio线程池使用。在Rust异步编程中,Tokio 是最主流的 runtime,它不仅负责调度 async 任务,还管理底层多线程池。任务少的时候,直接tokio::spawn执行任务还好,但是复杂起来,这样用可能存在隐患,比如任务阻塞、panic 传播或线程池耗尽等问题。下面把这些问题一一剖析下。
一、选择合理方案
主流方案有这几个,特点和场景如下:
1、标准库线程(std::thread)
| 优点 | 缺点 | 适用场景 |
|---|---|---|
| ✅ Rust 原生支持,无额外依赖 | ❌ 没有内置线程池 API,需要自己实现队列、调度 | 小型同步任务、学习用途 |
| ✅ 简单明了 | ❌ 线程数固定或手动管理,容易资源浪费 | CPU 核心数少,任务量小 |
| ✅ 灵活 | ❌ 不支持 async 任务,阻塞任务会阻塞整个线程 | 需要显式 join 或 detach 的场景 |
说明:最基础、可控,但缺少高级调度、异步支持和智能伸缩。
2、Rayon(CPU 密集型线程池)
| 优点 | 缺点 | 适用场景 |
|---|---|---|
| ✅ 工作窃取调度,高效利用多核 CPU | ❌ 不适合大量 IO 或阻塞任务 | CPU 密集型任务,例如并行迭代 (par_iter)、矩阵运算 |
| ✅ 自动管理线程数,默认 CPU 核心数 | ❌ 不支持 async / await 直接执行 | 并行算法、数据处理、科学计算 |
✅ 易用 API,集成 join / par_iter / scope |
❌ 异步任务需要结合 async runtime | 高吞吐量计算密集任务 |
总结:CPU 密集型首选,线程调度智能,任务高效并行。
缺点和原因:
-
a、为什么不适合IO密集任务? Rayon 的线程池是固定线程数(通常等于 CPU 核心数),线程主要用于 CPU 并行计算。如果线程执行阻塞 IO,线程被占用,其他 CPU 核心无法被充分利用。
-
b、为什么异步任务需要配合 runtime? Rayon 是同步任务调度,无法自动轮询 async 任务,需要通过
spawn_blocking或结合 Tokio 执行 async。
3、Tokio Runtime(异步线程池)
| 优点 | 缺点 | 适用场景 |
|---|---|---|
| ✅ 原生 async/await 支持 | ❌ 学习曲线较高,runtime 配置复杂 | IO 密集型、网络服务、Web 微服务 |
| ✅ 异步任务协作调度,不阻塞线程 | ❌ CPU 密集型任务需要单独 spawn_blocking | 高并发 HTTP 请求、数据库访问、WebSocket 等 |
| ✅ 支持定时器、任务优先级、任务超时 | ❌ 需要依赖 tokio crate | 大规模异步服务、事件驱动系统 |
| ✅ 线程可自动伸缩(多线程 runtime) | ❌ 任务阻塞需注意 | 需要数千到数万个并发任务 |
总结:异步任务最佳选择,高并发、IO 密集型场景下性能优异。
4、async-executor / smol(轻量级异步线程池)
| 优点 | 缺点 | 适用场景 |
|---|---|---|
| ✅ 轻量、可嵌入,适合微服务或小项目 | ❌ 功能比 tokio 少(少了定时器、io driver 等) | 小型 async 程序 |
| ✅ 支持 async/await | ❌ 不适合超大规模生产级服务 | 内存占用低,启动快 |
| ✅ 可组合不同 executor | ❌ 生态不如 tokio 丰富 | 嵌入式或轻量网络服务 |
总结:轻量异步,适合简单异步任务或小型应用,启动快,依赖少。
5、Crossbeam / threadpool crate(通用线程池)
| 优点 | 缺点 | 适用场景 |
|---|---|---|
| ✅ 高效队列和任务调度 | ❌ 不支持 async/await,需要手动封装 | CPU / IO 混合任务 |
| ✅ 灵活,可控制线程数、任务队列 | ❌ 异步任务需要额外 runtime | 通用多线程计算,简单 web 服务器 |
| ✅ 线程安全,支持任务提交 | ❌ 功能有限,无高级调度策略 | 并行任务或背景计算任务 |
总结:轻量、灵活,可作为中间方案;适合同步任务或对 async 支持要求不高的场景。
6、小结
综上所述,可以根据以下场景做初步判断:
- 如果是异步加IO,则选择Tokio方案
- 如果是CPU密集型,则适合Rayon,work-stealing 自动调度
- 简单同步,嵌入式等轻量网络场景,适合async-executor
- 日志写入、批量文件处理等场景,不想引入复杂的库,手动封装工具,可以用threadpool + crossbeam-channel
二、注意六个问题
选择了方案,设计的时候,还要考虑六个问题。假设选择了Tokio方案,下面一一剖析。
1、避免在 Tokio 线程中做阻塞操作
错误示例:
rust
tokio::spawn(async {
let result = std::thread::sleep(std::time::Duration::from_secs(5));
});正确做法 :使用 tokio::task::spawn_blocking
rust
tokio::spawn_blocking(|| {
std::thread::sleep(std::time::Duration::from_secs(5));
});原因:
- Tokio 的多线程 runtime 使用的是工作窃取(work-stealing)线程池,默认线程主要跑异步任务(Future)
- 异步任务是非阻塞的,一旦遇到
.await就会挂起,让出线程。 - 直接在异步线程里做阻塞操作(如
std::thread::sleep或 CPU 密集计算),线程就被占用,其他任务无法调度。
spawn_blocking 做了两件事:
- 把阻塞或 CPU 密集型任务移到专门的阻塞线程池(blocking pool),不占用异步 worker 线程。
- 返回一个异步 Future,可以
.await获取结果。
2、正确取消任务与设置超时
有的任务存在时间限制,比如http请求,万一有bug,任务无限循环,会导致资源耗尽。因此增加超时时间是个好习惯。
a、直接设置超时时间
rust
use tokio::time::{timeout, Duration};
let res = timeout(Duration::from_secs(5), async_task()).await;
match res {
Ok(result) => println!("Task completed: {:?}", result),
Err(_) => println!("Task timed out"),
}适合 I/O 或 CPU 较轻的异步任务,不适合长时间阻塞的同步任务。另外,如果超时,任务会被取消,但仍可能在后台运行(取决于 future 是否可取消)。
b、Task超时,取消Future
在 Rust 异步模型里,Future 只有在被 .await 驱动时才执行 。tokio::time::timeout 只是"等待 Future 在指定时间内完成",Future 本身不会自动停止。只有 Future 自身实现了取消逻辑或外部任务被驱动停止,才会真正停止执行。两种取消方式如下:
- Tokio 提供
tokio_util::sync::CancellationToken或futures::future::Abortable来显式取消任务。
rust
use futures::future::{Abortable, AbortHandle};
use tokio::time::{sleep, Duration};
#[tokio::main]
async fn main() {
// 创建 abort handle
let (abort_handle, abort_registration) = AbortHandle::new_pair();
// 构建一个可取消的 Future
let future = Abortable::new(async {
for i in 0..10 {
println!("任务运行 {}", i);
sleep(Duration::from_secs(1)).await;
}
"任务完成"
}, abort_registration);
// 启动任务
let task = tokio::spawn(future);
// 超时模拟
tokio::time::sleep(Duration::from_secs(3)).await;
abort_handle.abort(); // 发出取消信号
match task.await {
Ok(Ok(result)) => println!("任务完成: {}", result),
Ok(Err(_)) => println!("任务被取消"),
Err(e) => eprintln!("任务 panic: {:?}", e),
}
}-
CancellationToken(Tokio 官方推荐)rustuse tokio::time::{self, Duration, timeout}; use tokio_util::sync::CancellationToken; use reqwest::Client; #[tokio::main] async fn main() { let token = CancellationToken::new(); let client = Client::new(); for i in 0..3 { let child = token.child_token(); let client = client.clone(); tokio::spawn(async move { tokio::select! { _ = child.cancelled() => { println!("任务 {} 被取消", i); } result = timeout(Duration::from_secs(4), async { match client.get("https://httpbin.org/delay/5").send().await { Ok(r) => println!("任务 {} 完成: {}", i, r.status()), Err(e) => eprintln!("任务 {} 错误: {:?}", i, e), } }) => { if result.is_err() { println!("任务 {} 超时", i); } } } }); } time::sleep(Duration::from_secs(2)).await; println!("===> 统一取消"); token.cancel(); time::sleep(Duration::from_secs(3)).await; println!("===> 程序结束"); }打印结果:
lua===> 统一取消 任务 2 被取消 任务 1 被取消 任务 0 被取消 ===> 程序结束说明:
CancellationToken是 Tokio 官方提供的轻量取消机制(tokio-util包)- 在 Future 内部需要使用
tokio::select!等机制检测取消信号 - 可以灵活取消多个任务(child token 可级联)
3、错误处理与 panic 捕获
a、所有任务应 .await JoinHandle
捕获 panic 并记录日志,避免整个 runtime 崩溃
rust
let handle = tokio::spawn(async {
panic!("something went wrong");
});
match handle.await {
Ok(_) => println!("ok"),
Err(e) if e.is_panic() => {
println!("任务 panic: {:?}", e);
if let Some(reason) = e.into_panic().downcast_ref::<&str>() {
println!("panic 原因: {}", reason);
}
}
Err(_) => {}
}对于 fire-and-forget 的任务,使用:
rust
tokio::spawn(async {
if let Err(e) = async_logic().await {
tracing::error!("task failed: {:?}", e);
}
});可以使用 std::panic::set_hook 全局捕获 panic 日志:
rust
std::panic::set_hook(Box::new(|info| {
eprintln!("Tokio task panic: {}", info);
}));b、为什么捕获panic?
当任务内部 panic 时,await 返回 Err(JoinError), 如果忽略 await 或 JoinHandle,panic 可能传播到 runtime 的主线程或 runtime worker,造成不可预期行为.
4、多线程方法崩了,如何确定来源
Rust + Tokio 的崩溃通常有两种来源
a、.await 捕获
rust
let handle = tokio::spawn(async {
panic!("oops");
});
if let Err(e) = handle.await {
println!("task panicked: {:?}", e);
}b、启用 RUST_BACKTRACE=1 环境变量
shell
RUST_BACKTRACE=1 cargo run输出会包含 thread 'tokio-runtime-worker-0' panicked at ...,指示是哪个线程
c、设置线程池名字
rust
use tokio::runtime::Builder;
let rt = Builder::new_multi_thread()
.worker_threads(4)
.thread_name("my-tokio-worker")
.enable_all()
.build()
.unwrap();
rt.block_on(async {
println!("running async task");
});输出线程名会是 my-tokio-worker-0、my-tokio-worker-1 等
5、避免系统过载问题
a、直接设置线程池参数
tokio::runtime::Builder 提供了灵活接口
CPU 密集型应用
rust
use tokio::runtime::Builder;
let rt = Builder::new_multi_thread()
.worker_threads(num_cpus::get()) // 固定等于核心数
.max_blocking_threads(8)
.thread_keep_alive(Duration::from_secs(5))
.enable_all()
.build()
.unwrap();IO 密集型 / Web Server 应用
rust
let rt = Builder::new_multi_thread()
.worker_threads(num_cpus::get() * 2) // 更高并发
.max_blocking_threads(256)
.thread_keep_alive(Duration::from_secs(30))
.on_thread_start(|| tracing::info!("worker started"))
.on_thread_stop(|| tracing::info!("worker stopped"))
.enable_all()
.build()
.unwrap();Tokio 没有公开直接配置 Local/Global 队列长度的接口。 队列容量是自适应的,一般是局部 256,超出后会将任务推送到 Global Queue。
如果确实需要控制任务提交频率,可使用信号量或通道。
b、从生产方限制:有界通道 + spawn
rust
use tokio::sync::mpsc;
use tokio::task;
#[tokio::main]
async fn main() {
// 创建容量为 5 的有界通道
let (tx, mut rx) = mpsc::channel::<i32>(5);
// 模拟任务生产者
let producer = tokio::spawn(async move {
for i in 0..10 {
if let Err(_) = tx.try_send(i) { // try_send 超出容量会返回错误
println!("任务{}被拒绝", i);
}
}
});
// 模拟任务消费者
let consumer = tokio::spawn(async move {
while let Some(task) = rx.recv().await {
println!("处理任务 {}", task);
tokio::time::sleep(std::time::Duration::from_millis(200)).await;
}
});
producer.await.unwrap();
consumer.await.unwrap();
}特点:
mpsc::channel(capacity)创建有界队列try_send如果队列满,就返回Err拒绝任务
b、信号量(Semaphore)控制并发任务数
rust
use tokio::sync::Semaphore;
use tokio::task;
use std::sync::Arc;
#[tokio::main]
async fn main() {
let max_concurrent_tasks = 3;
let semaphore = Arc::new(Semaphore::new(max_concurrent_tasks));
for i in 0..10 {
let sem = semaphore.clone();
tokio::spawn(async move {
// try_acquire 非阻塞申请许可
if let Ok(_permit) = sem.try_acquire() {
println!("处理任务 {}", i);
tokio::time::sleep(std::time::Duration::from_secs(1)).await;
} else {
println!("任务{}被拒绝", i);
}
});
}
tokio::time::sleep(std::time::Duration::from_secs(5)).await;
}特点:
- 信号量限制最大并发任务数
- 超过并发数的任务直接拒绝(或者可用
acquire().await等待许可)
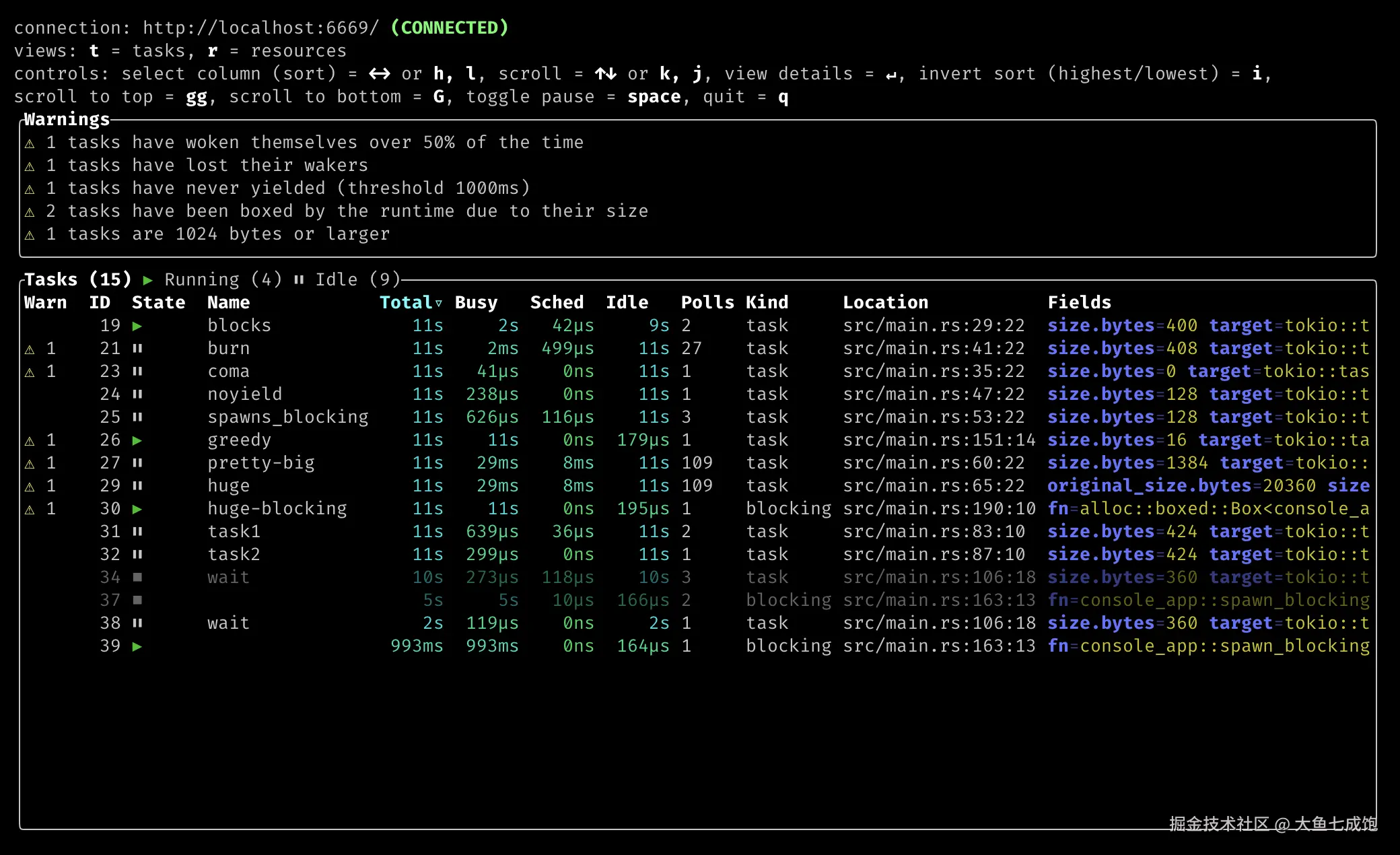
c、监控运行状态:Tokio Console + tracing
arduino
可实时查看:
tokio-console run your_app监控:
- 正在运行的任务数
- 队列积压情况
- 线程使用率
6、Docker 环境下获取 CPU 不准确
tokio::runtime::Builder::new_multi_thread() 默认会使用:
rust
let n = num_cpus::get();而 num_cpus::get() 调用 /proc/cpuinfo 或系统 API 来判断 CPU 数。 但在 Docker / 容器中,如果没有正确设置 CPU 限制(cgroup v1/v2),它可能返回宿主机的核心数。
例如:容器被限制为 2 核,但 num_cpus::get() 返回 32。
a、方案1,读取 cgroup 信息
使用 num_cpus::get_physical() 无法解决容器问题, 推荐使用 cgroups crate 或 sysinfo 获取真实限制。
rust
use sysinfo::{System, SystemExt, CpuRefreshKind, RefreshKind};
fn docker_cpu_limit() -> usize {
let sys = System::new_with_specifics(RefreshKind::new().with_cpu(CpuRefreshKind::everything()));
let cpu_count = sys.cpus().len();
println!("Detected {} CPUs (may reflect Docker cgroup limits)", cpu_count);
cpu_count
}
let rt = tokio::runtime::Builder::new_multi_thread()
.worker_threads(docker_cpu_limit())
.build()
.unwrap();b、方案2, 显式配置
ini
ENV TOKIO_WORKER_THREADS=2
css
let worker_threads = std::env::var("TOKIO_WORKER_THREADS")
.ok()
.and_then(|v| v.parse().ok())
.unwrap_or(num_cpus::get());在容器环境中总是显式指定 worker 数,不依赖自动检测。
三、总结
本文总结了Rust线程池如何选择方案,需要注意的六个问题,如避免阻塞操作、设置超时、崩溃和监控等,也解释了原理。不过从经验来说,如果有的选,尽量少使用多线程,不管哪种语言,都会带来挺大的心智负担,稍不注意,系统就挂了。
如果觉得有用请点个关注吧,本人公众号大鱼七成饱。