目录
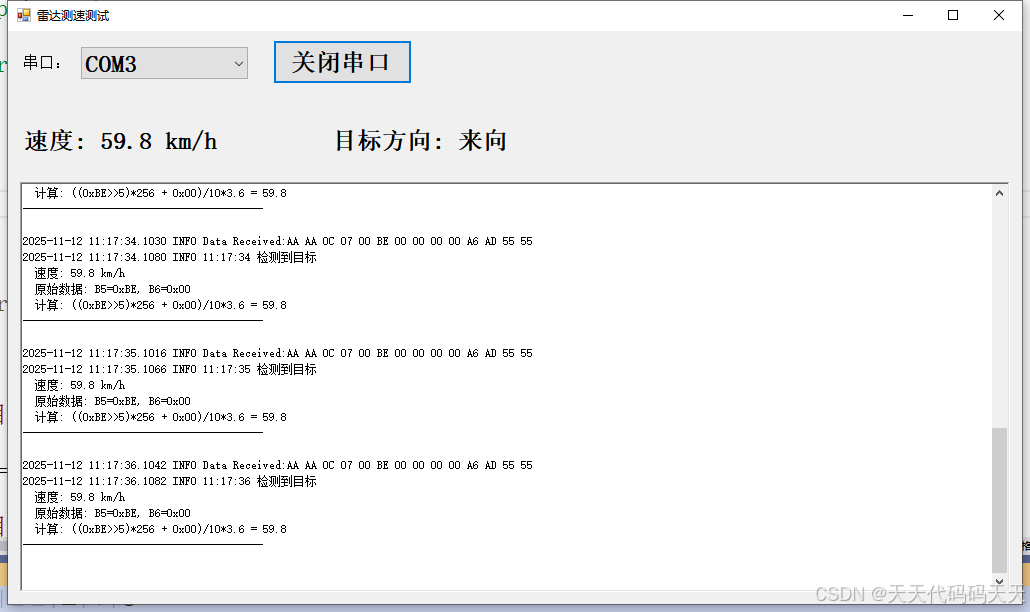
效果
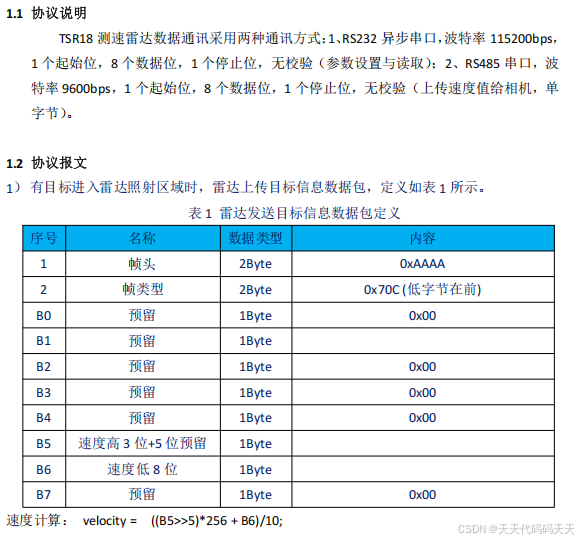
协议
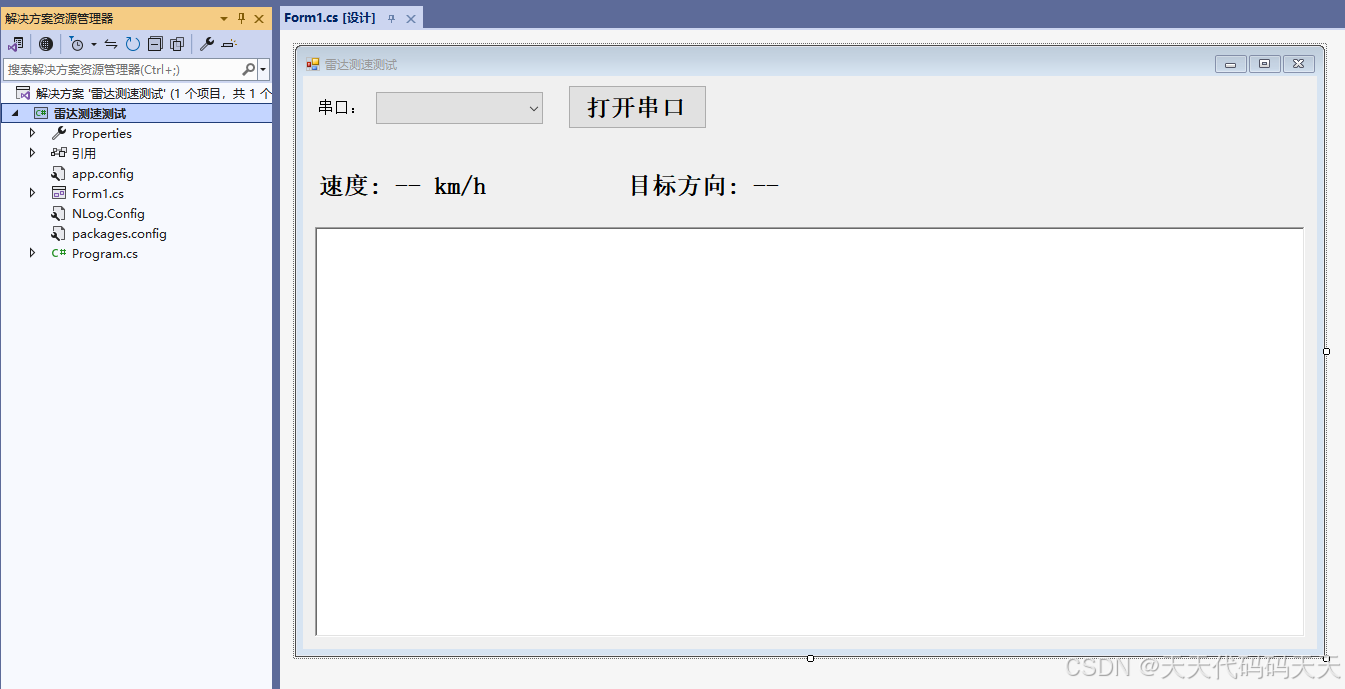
项目
代码
using NLog;
using System;
using System.IO.Ports;
using System.Text;
using System.Threading;
using System.Windows.Forms;
namespace 雷达测速测试
{
public partial class Form1 : Form
{
public Form1()
{
InitializeComponent();
NLog.Windows.Forms.RichTextBoxTarget.ReInitializeAllTextboxes(this);
}
private Logger log = NLog.LogManager.GetCurrentClassLogger();
private byte\[\] buffer = new byte1024;
private int bufferIndex = 0;
private const int PACKET_SIZE = 12; // 帧头2 + 帧类型2 + B0-B7 8个字节
private const ushort FRAME_HEADER = 0xAAAA;
private const ushort FRAME_TYPE = 0x700C; // 注意:低字节在前,实际是0x0C70
private void Form1_Load(object sender, EventArgs e)
{
// 获取所有串口名称
string\[\] ports = SerialPort.GetPortNames();
// 清空ComboBox中的现有项(如果需要)
comboBox1.Items.Clear();
// 将所有串口名称添加到ComboBox中
foreach (string port in ports)
{
comboBox1.Items.Add(port);
}
// 可选:默认选中第一个串口(如果有的话)
if (comboBox1.Items.Count > 0)
{
comboBox1.SelectedIndex = 0;
}
}
private void button1_Click(object sender, EventArgs e)
{
if (button1.Text == "打开串口")
{
if (comboBox1.SelectedItem != null)
{
try
{
string selectedPort = comboBox1.SelectedItem.ToString();
// 串口名
serialPort1.PortName = selectedPort;
// 波特率
serialPort1.BaudRate = 115200;
// 数据位
serialPort1.DataBits = 8;
// 停止位
serialPort1.StopBits = System.IO.Ports.StopBits.One;
// 奇偶校验位
serialPort1.Parity = System.IO.Ports.Parity.None;
serialPort1.WriteTimeout = 3000; //串口发送的超时时间
serialPort1.ReadTimeout = 18000;//读取数据的超时时间
serialPort1.ReadBufferSize = 1024 * 1024; //串口接收缓冲区大小
serialPort1.WriteBufferSize = 1024 * 1024; //串口发送缓冲区大小
serialPort1.Open();
button1.Text = "关闭串口";
log.Info("打开成功!");
}
catch (Exception ex)
{
log.Error("打开串口失败:" + ex.Message);
}
}
}
else
{
labelSpeed.Text = "速度: -- km/h";
labelDirection.Text = "目标方向: --";
try
{
serialPort1.Close();
button1.Text = "打开串口";
log.Info("关闭成功!");
}
catch (Exception ex)
{
log.Error("关闭串口失败:" + ex.Message);
}
}
}
private void serialPort1_DataReceived(object sender, SerialDataReceivedEventArgs e)
{
Thread.Sleep(100);//这个延时非常重要
try
{
byte\[\] m_recvBytes = new byte14; //定义缓冲区大小
int result = serialPort1.Read(m_recvBytes, 0, m_recvBytes.Length); //从串口读取数据
if (result <= 0)
return;
string hexString = BitConverter.ToString(m_recvBytes).Replace("-", " ");
//string strResult = Encoding.UTF8.GetString(m_recvBytes, 0, m_recvBytes.Length); //对数据进行转换
log.Info("Data Received:" + hexString);
// 计算速度
double speed = CalculateSpeed(m_recvBytes9, m_recvBytes10);
String direction = Direction(m_recvBytes4);
// 更新UI
Invoke(new Action(() => UpdateSpeedDisplay(speed, direction, m_recvBytes)));
}
catch (Exception ex)
{
log.Error("读取数据异常:" + ex.Message);
}
}
private String Direction(byte b0)
{
if (b0 == 0)
{
return "目标方向: 来向";
}
else if (b0 == 1)
{
return "目标方向: 去向";
}
else if (b0 == 2)
{
return "目标方向: 无方向";
}
else
{
return "目标方向: --";
}
}
private double CalculateSpeed(byte b5, byte b6)
{
// velocity = ((B5>>5)*256 + B6)/10*3.6;
int speedValue = ((b5 >> 5) * 256 + b6);
double speed = speedValue / 10.0 * 3.6;
return speed;
}
private void UpdateSpeedDisplay(double speed, string direction, byte\[\] dataBytes)
{
// 显示速度
labelSpeed.Text = $"速度: {speed:F1} km/h";
labelDirection.Text = direction;
// 记录到日志
StringBuilder info = new StringBuilder();
info.AppendLine($"{DateTime.Now:HH:mm:ss} 检测到目标");
info.AppendLine($" 速度: {speed:F1} km/h");
info.AppendLine($" 原始数据: B5=0x{dataBytes9:X2}, B6=0x{dataBytes10:X2}");
info.AppendLine($" 计算: ((0x{dataBytes9:X2}>>5)*256 + 0x{dataBytes10:X2})/10*3.6 = {speed:F1}");
info.AppendLine(new string('-', 40));
log.Info(info.ToString());
}
private void serialPort1_ErrorReceived(object sender, SerialErrorReceivedEventArgs e)
{
//log.Error("ErrorReceived");
}
private void serialPort1_PinChanged(object sender, SerialPinChangedEventArgs e)
{
log.Error("PinChanged");
}
}
}
using NLog;
using System;
using System.IO.Ports;
using System.Text;
using System.Threading;
using System.Windows.Forms;
namespace 雷达测速测试
{
public partial class Form1 : Form
{
public Form1()
{
InitializeComponent();
NLog.Windows.Forms.RichTextBoxTarget.ReInitializeAllTextboxes(this);
}
private Logger log = NLog.LogManager.GetCurrentClassLogger();
private byte[] buffer = new byte[1024];
private int bufferIndex = 0;
private const int PACKET_SIZE = 12; // 帧头2 + 帧类型2 + B0-B7 8个字节
private const ushort FRAME_HEADER = 0xAAAA;
private const ushort FRAME_TYPE = 0x700C; // 注意:低字节在前,实际是0x0C70
private void Form1_Load(object sender, EventArgs e)
{
// 获取所有串口名称
string[] ports = SerialPort.GetPortNames();
// 清空ComboBox中的现有项(如果需要)
comboBox1.Items.Clear();
// 将所有串口名称添加到ComboBox中
foreach (string port in ports)
{
comboBox1.Items.Add(port);
}
// 可选:默认选中第一个串口(如果有的话)
if (comboBox1.Items.Count > 0)
{
comboBox1.SelectedIndex = 0;
}
}
private void button1_Click(object sender, EventArgs e)
{
if (button1.Text == "打开串口")
{
if (comboBox1.SelectedItem != null)
{
try
{
string selectedPort = comboBox1.SelectedItem.ToString();
// 串口名
serialPort1.PortName = selectedPort;
// 波特率
serialPort1.BaudRate = 115200;
// 数据位
serialPort1.DataBits = 8;
// 停止位
serialPort1.StopBits = System.IO.Ports.StopBits.One;
// 奇偶校验位
serialPort1.Parity = System.IO.Ports.Parity.None;
serialPort1.WriteTimeout = 3000; //串口发送的超时时间
serialPort1.ReadTimeout = 18000;//读取数据的超时时间
serialPort1.ReadBufferSize = 1024 * 1024; //串口接收缓冲区大小
serialPort1.WriteBufferSize = 1024 * 1024; //串口发送缓冲区大小
serialPort1.Open();
button1.Text = "关闭串口";
log.Info("打开成功!");
}
catch (Exception ex)
{
log.Error("打开串口失败:" + ex.Message);
}
}
}
else
{
labelSpeed.Text = "速度: -- km/h";
labelDirection.Text = "目标方向: --";
try
{
serialPort1.Close();
button1.Text = "打开串口";
log.Info("关闭成功!");
}
catch (Exception ex)
{
log.Error("关闭串口失败:" + ex.Message);
}
}
}
private void serialPort1_DataReceived(object sender, SerialDataReceivedEventArgs e)
{
Thread.Sleep(100);//这个延时非常重要
try
{
byte[] m_recvBytes = new byte[14]; //定义缓冲区大小
int result = serialPort1.Read(m_recvBytes, 0, m_recvBytes.Length); //从串口读取数据
if (result <= 0)
return;
string hexString = BitConverter.ToString(m_recvBytes).Replace("-", " ");
//string strResult = Encoding.UTF8.GetString(m_recvBytes, 0, m_recvBytes.Length); //对数据进行转换
log.Info("Data Received:" + hexString);
// 计算速度
double speed = CalculateSpeed(m_recvBytes[9], m_recvBytes[10]);
String direction = Direction(m_recvBytes[4]);
// 更新UI
Invoke(new Action(() => UpdateSpeedDisplay(speed, direction, m_recvBytes)));
}
catch (Exception ex)
{
log.Error("读取数据异常:" + ex.Message);
}
}
private String Direction(byte b0)
{
if (b0 == 0)
{
return "目标方向: 来向";
}
else if (b0 == 1)
{
return "目标方向: 去向";
}
else if (b0 == 2)
{
return "目标方向: 无方向";
}
else
{
return "目标方向: --";
}
}
private double CalculateSpeed(byte b5, byte b6)
{
// velocity = ((B5>>5)*256 + B6)/10*3.6;
int speedValue = ((b5 >> 5) * 256 + b6);
double speed = speedValue / 10.0 * 3.6;
return speed;
}
private void UpdateSpeedDisplay(double speed, string direction, byte[] dataBytes)
{
// 显示速度
labelSpeed.Text = $"速度: {speed:F1} km/h";
labelDirection.Text = direction;
// 记录到日志
StringBuilder info = new StringBuilder();
info.AppendLine($"{DateTime.Now:HH:mm:ss} 检测到目标");
info.AppendLine($" 速度: {speed:F1} km/h");
info.AppendLine($" 原始数据: B5=0x{dataBytes[9]:X2}, B6=0x{dataBytes[10]:X2}");
info.AppendLine($" 计算: ((0x{dataBytes[9]:X2}>>5)*256 + 0x{dataBytes[10]:X2})/10*3.6 = {speed:F1}");
info.AppendLine(new string('-', 40));
log.Info(info.ToString());
}
private void serialPort1_ErrorReceived(object sender, SerialErrorReceivedEventArgs e)
{
//log.Error("ErrorReceived");
}
private void serialPort1_PinChanged(object sender, SerialPinChangedEventArgs e)
{
log.Error("PinChanged");
}
}
}