osg点云显示类贴出
//**********************************************************************
// osg仿真显示工具
// @阿甘整理 20250828
//**********************************************************************
#pragma once
#include <QtCore/QtCore>
#include <QtWidgets/QtWidgets>
#include <osgQOpenGL/osgQOpenGLWidget>
#include <osg/Geode>
#include <osg/MatrixTransform>
#include <pcl/point_cloud.h>
#include <pcl/point_types.h>
//osg点云显示
class osgCloud : public QWidget
{
Q_OBJECT
public:
osgCloud(QWidget* parent = nullptr);
~osgCloud(void);
protected slots:
//OsgQOpenGLWidget延迟加载 测试仿真显示
void initWindow();
//测试加载psd
void loadPcd(void);
public:
//加载显示点云
void loadCloud(pcl::PointCloud<pcl::PointXYZ>::Ptr pCloud);
//保存点云到文件
void saveCloud(pcl::PointCloud<pcl::PointXYZ>::Ptr cloud, const std::string name);
//清空点云
void removeAllPointClouds();
private:
osgQOpenGLWidget* _pOsgQOpenGLWidget;
osgViewer::Viewer* pViewer;
osg::ref_ptr<osg::Geode> geode;
osg::ref_ptr<osg::MatrixTransform> transform;
QGridLayout* m_mylay;
};实现部分
#include "osgCloud.h"
#include <osg/Node>
#include <osg/LineWidth>
#include <osg/ShapeDrawable>
#include <osg/Geode>
#include <osg/Matrixd>
#include <osg/Camera>
#include <osg/Point>
#include <osg/MatrixTransform>
#include <osg/Geometry>
#include <osg/BlendFunc>
#include <osg/Material>
#include <osg/StateSet>
#include <osgDB/ReadFile>
#include <osgViewer/View>
#include <osgViewer/Viewer>
#include <osgGA/TrackballManipulator>
#include <osgText/Text>
#include <osgUtil/Optimizer>
#include <osg/Multisample>
#pragma execution_character_set("utf-8")
#include <pcl/io/pcd_io.h>
#include <pcl/common/centroid.h>
#include <pcl/point_types.h>
#include <pcl/point_cloud.h>
#include <pcl/point_types.h>
#include <pcl/io/ply_io.h>
osgCloud::osgCloud(QWidget* parent): QWidget(parent)
{
transform = new osg::MatrixTransform();
geode = new osg::Geode;
_pOsgQOpenGLWidget = new osgQOpenGLWidget(parent);
m_mylay = new QGridLayout(this);
m_mylay->setSpacing(0);
m_mylay->setMargin(0);
m_mylay->setContentsMargins(0, 0, 0, 0);
m_mylay->addWidget(_pOsgQOpenGLWidget);
_pOsgQOpenGLWidget->setGeometry(this->geometry());
//_pOsgQOpenGLWidget延迟加载
connect(_pOsgQOpenGLWidget, SIGNAL(initialized()), this, SLOT(initWindow()));
}
osgCloud::~osgCloud(void)
{
}
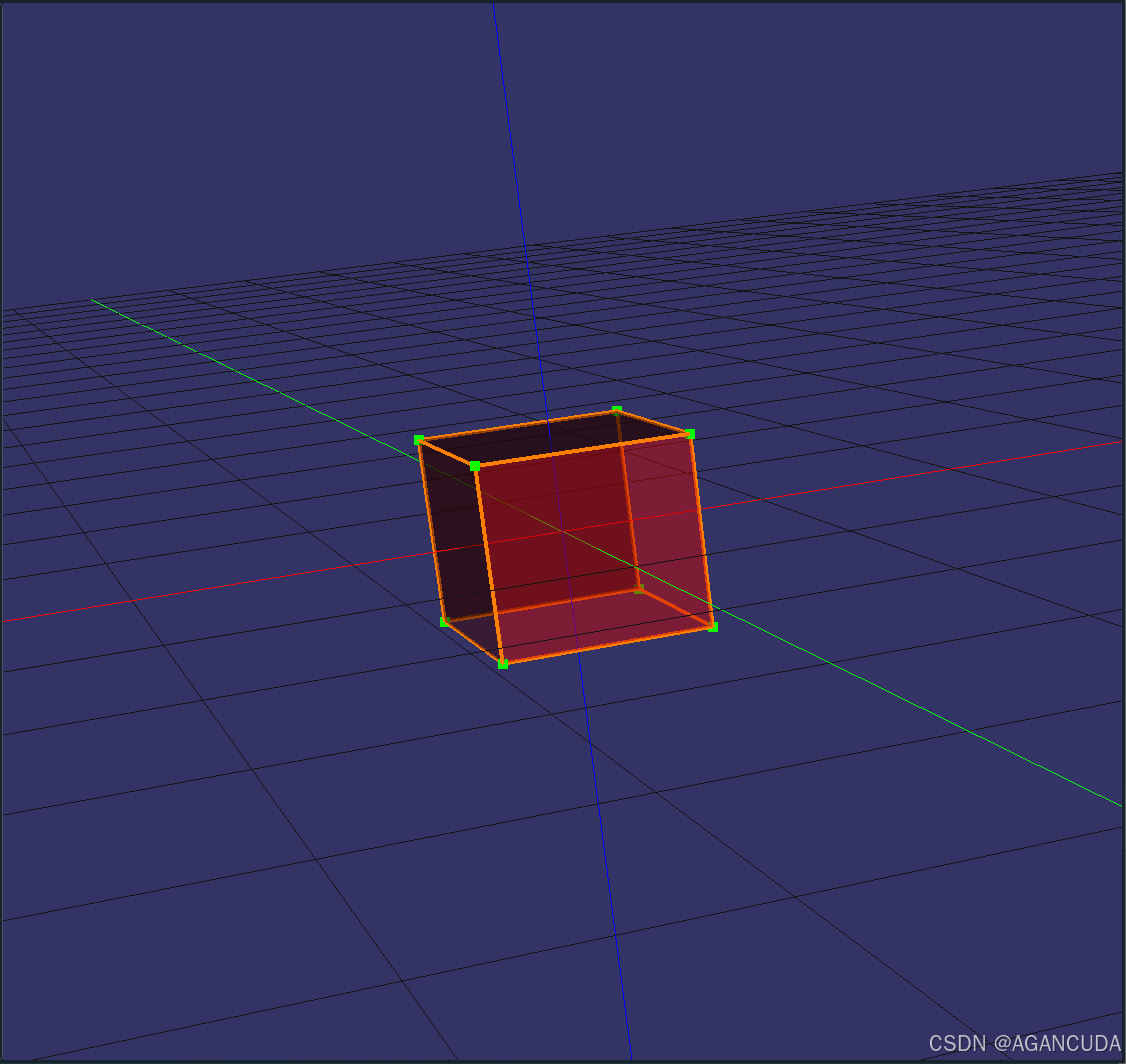
void osgCloud::initWindow(void)
{
//return loadPcd();
//创建坐标系网格
auto createInfiniteGrid = [](float gridSize = 1.0f, int gridCount = 20)->osg::ref_ptr<osg::Node>
{
osg::Group* root = new osg::Group();
osg::StateSet* stateset = root->getOrCreateStateSet();
// 网格线设置(浅灰色细线)
osg::LineWidth* gridLineWidth = new osg::LineWidth(1.0f);
stateset->setAttribute(gridLineWidth);
// 创建XY平面网格
osg::Geometry* gridGeometry = new osg::Geometry();
osg::Vec3Array* vertices = new osg::Vec3Array();
// 生成网格线顶点(双向无限延伸)
float halfSize = gridSize * gridCount;
for (int i = -gridCount; i <= gridCount; ++i)
{
if (i == 0)
{
continue; //排除掉下x y轴
}
float pos = i * gridSize;
// X方向线
vertices->push_back(osg::Vec3(-halfSize, pos, 0));
vertices->push_back(osg::Vec3(halfSize, pos, 0));
// Y方向线
vertices->push_back(osg::Vec3(pos, -halfSize, 0));
vertices->push_back(osg::Vec3(pos, halfSize, 0));
}
gridGeometry->setVertexArray(vertices);
osg::Vec4Array* colors = new osg::Vec4Array();
colors->push_back(osg::Vec4(0.8f, 0.8f, 0.8f, 0.5f)); // 浅灰色半透明
gridGeometry->setColorArray(colors);
gridGeometry->setColorBinding(osg::Geometry::BIND_OVERALL);
gridGeometry->addPrimitiveSet(new osg::DrawArrays(osg::PrimitiveSet::LINES, 0, vertices->size()));
osg::Geode* gridGeode = new osg::Geode();
gridGeode->addDrawable(gridGeometry);
root->addChild(gridGeode);
return root;
};
//创建X Y Z坐标系
auto create3DCoordinateSystem = [](float axisLength = 10.0f)->osg::ref_ptr<osg::Node>
{
osg::Group* root = new osg::Group();
osg::StateSet* stateset = root->getOrCreateStateSet();
// 设置线宽(加粗效果)
osg::LineWidth* lineWidth = new osg::LineWidth(1.0f); //线粗
stateset->setAttribute(lineWidth);
// 定义轴半径和箭头尺寸
//float axisRadius = axisLength * 0.02f;
//float arrowRadius = axisRadius * 2.0f;
//float arrowHeight = axisLength * 0.1f;
// 创建坐标轴函数
auto createAxis = [&](osg::Vec3 dir, osg::Vec4 color, std::string label)
{
osg::Geode* geode = new osg::Geode();
// 坐标轴线
osg::Geometry* geom = new osg::Geometry();
// 禁用光照 就没有旋转到反面变黑色的问题了
geom->getOrCreateStateSet()->setMode(GL_LIGHTING, osg::StateAttribute::OFF);
osg::Vec3Array* vertices = new osg::Vec3Array();
vertices->push_back(dir * -axisLength);
vertices->push_back(dir * axisLength);
geom->setVertexArray(vertices);
osg::Vec4Array* colors = new osg::Vec4Array();
colors->push_back(color);
geom->setColorArray(colors);
geom->setColorBinding(osg::Geometry::BIND_OVERALL);
geom->addPrimitiveSet(new osg::DrawArrays(osg::PrimitiveSet::LINES, 0, vertices->size()));//2
geode->addDrawable(geom);
// 坐标轴标签
osgText::Text* text = new osgText::Text();
//text->setFont("arial.ttf");
text->setCharacterSize(1.0f);
text->setPosition(dir * (axisLength + 1));
text->setText(label);
text->setColor(color);
text->setAlignment(osgText::Text::CENTER_CENTER);
geode->addDrawable(text);
return geode;
};
// 创建XYZ三轴
root->addChild(createAxis(osg::Vec3(2, 0, 0), osg::Vec4(1, 0, 0, 1), "X"));
root->addChild(createAxis(osg::Vec3(0, 2, 0), osg::Vec4(0, 1, 0, 1), "Y"));
root->addChild(createAxis(osg::Vec3(0, 0, 2), osg::Vec4(0, 0, 1, 1), "Z"));
return root;
};
pViewer = _pOsgQOpenGLWidget->getOsgViewer();
pViewer->getCamera()->setClearColor(osg::Vec4(0.2f, 0.2f, 0.2f, 1.0f)); // 浅灰色背景
transform->addChild(createInfiniteGrid()); //创建网格
transform->addChild(create3DCoordinateSystem()); //创建xyz坐标轴
transform->addChild(geode);
osgGA::TrackballManipulator* manipulator = new osgGA::TrackballManipulator();
manipulator->setVerticalAxisFixed(false); // 允许自由旋转
manipulator->setWheelZoomFactor(-0.1); // 反转滚动灵敏度 默认0.1改为-0.1
pViewer->setCameraManipulator(manipulator);
//pViewer->setCameraManipulator(new osgGA::TrackballManipulator);
pViewer->setSceneData(transform);
pViewer->getCameraManipulator()->setHomePosition(
osg::Vec3d(8, 8, 8), // 眼睛位置 数字越大相机越远
osg::Vec3d(0, 0, 0), // 观察点(原点)
osg::Vec3d(0, 1, 0) // 上方向
);
pViewer->home();
}
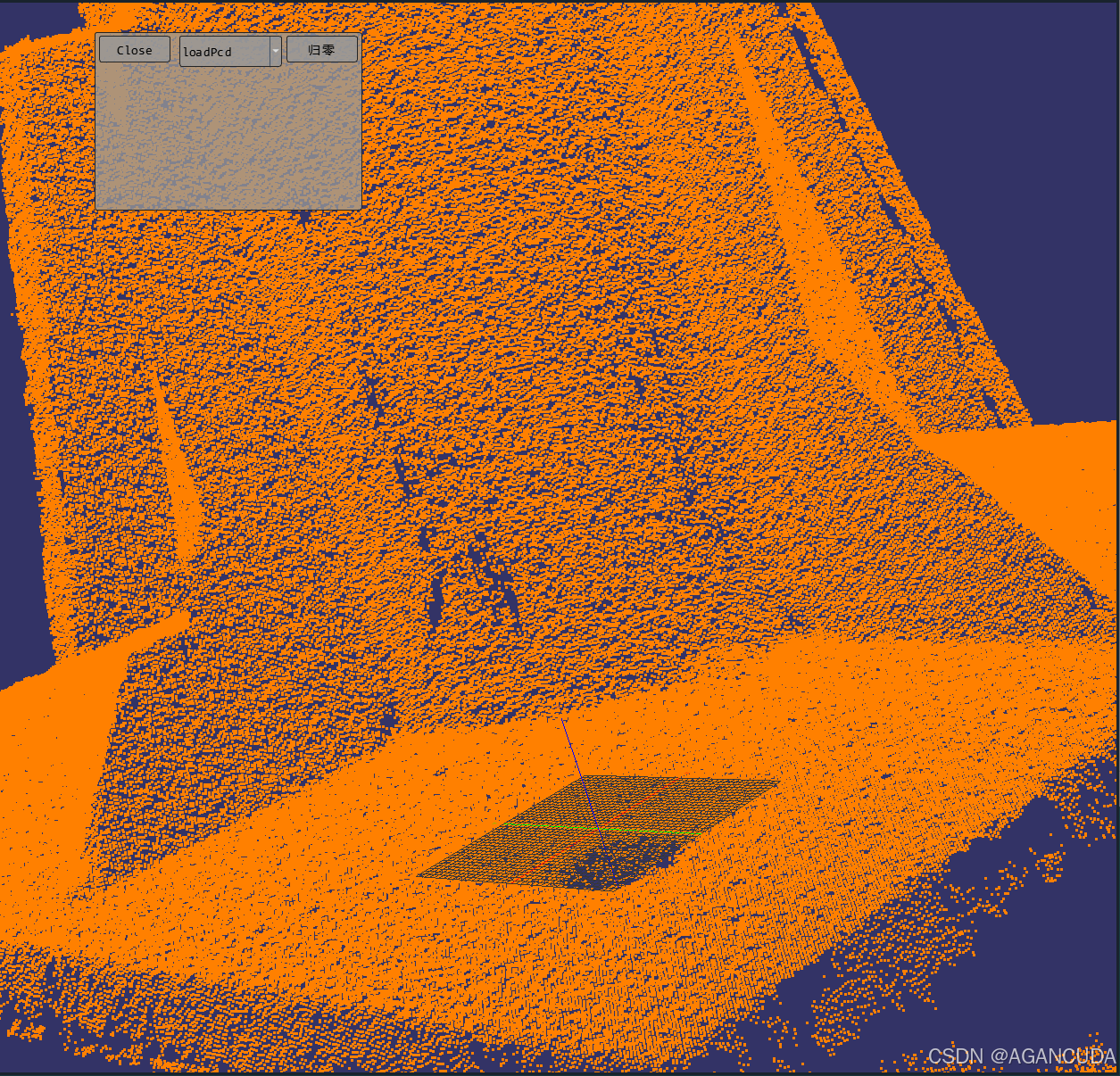
void osgCloud::loadPcd(void)
{
//加载pcd测试
auto osgPointCloudNode = [&](osgViewer::Viewer * pViewer)
{
const std::string pcd_file = "mouse.pcd";
//osg::ref_ptr<osg::Node> createPointCloudNode(const std::string& pcd_file)
// 读取PCD文件
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud(new pcl::PointCloud<pcl::PointXYZ>);
if (pcl::io::loadPCDFile<pcl::PointXYZ>(pcd_file, *cloud) == -1)
{
std::cerr << "无法加载PCD文件: " << pcd_file << std::endl;
return nullptr;
}
// 创建OSG几何体
osg::ref_ptr<osg::Geometry> geometry(new osg::Geometry);
osg::ref_ptr<osg::Vec3Array> vertices(new osg::Vec3Array);
osg::ref_ptr<osg::Vec4Array> colors(new osg::Vec4Array);
// 填充顶点和颜色数据
for (const auto& point : cloud->points)
{
vertices->push_back(osg::Vec3(point.x, point.y, point.z));
colors->push_back(osg::Vec4(1.0f, 0.5f, 0.0f, 1.0f)); // 橙色点
}
geometry->setVertexArray(vertices);
geometry->setColorArray(colors);
geometry->setColorBinding(osg::Geometry::BIND_PER_VERTEX);
geometry->addPrimitiveSet(new osg::DrawArrays(osg::PrimitiveSet::POINTS, 0, vertices->size()));
geometry->getOrCreateStateSet()->setMode(GL_LIGHTING, osg::StateAttribute::OFF); //禁用光照
// 创建Geode节点并添加几何体
osg::ref_ptr<osg::Geode> geode(new osg::Geode);
geode->addDrawable(geometry);
pViewer->setCameraManipulator(new osgGA::TrackballManipulator);
pViewer->setSceneData(geode);
};
//测试加载
pViewer = _pOsgQOpenGLWidget->getOsgViewer();
//测试加载pcd
osgPointCloudNode(pViewer);
}
void osgCloud::loadCloud(pcl::PointCloud<pcl::PointXYZ>::Ptr pCloud)
{
if (pCloud->points.size() != 0)
{
//计算点云中心
Eigen::Vector4f centroid;
pcl::compute3DCentroid(*pCloud, centroid);
// 创建OSG几何体
osg::ref_ptr<osg::Geometry> geometry(new osg::Geometry);
osg::ref_ptr<osg::Vec3Array> vertices(new osg::Vec3Array);
osg::ref_ptr<osg::Vec4Array> colors(new osg::Vec4Array);
osg::Vec3f currpt;
// 填充顶点和颜色数据
for (const auto& point : pCloud->points)
{
//减去中心坐标使点云居中
vertices->push_back(osg::Vec3f(point.x - centroid[0], point.y - centroid[1], point.z - centroid[2]));
colors->push_back(osg::Vec4(1.0f, 0.5f, 0.0f, 1.0f)); // 橙色点
}
geometry->setVertexArray(vertices);
geometry->setColorArray(colors);
geometry->setColorBinding(osg::Geometry::BIND_PER_VERTEX);
//设置点大小
osg::ref_ptr<osg::Point> mypoint = new osg::Point;
mypoint->setSize(3.0f);
geometry->getOrCreateStateSet()->setAttribute(mypoint);
geometry->addPrimitiveSet(new osg::DrawArrays(osg::PrimitiveSet::POINTS, 0, vertices->size()));
geometry->getOrCreateStateSet()->setMode(GL_LIGHTING, osg::StateAttribute::OFF); //禁用光照
removeAllPointClouds();
//添加到主视图
geode->addDrawable(geometry);
//pViewer->getCameraManipulator()->setHomePosition(
// osg::Vec3d(48, 48, 48), // 眼睛位置 数字越大相机越远
// osg::Vec3d(0, 0, 0), // 观察点(原点)
// osg::Vec3d(0, 1, 0) // 上方向
//);
//pViewer->home();
}
else {
QMessageBox::about(this, "error", "error!");
}
}
void osgCloud::saveCloud(pcl::PointCloud<pcl::PointXYZ>::Ptr cloud, const std::string name)
{
pcl::io::savePCDFileBinary(name, *cloud);
}
void osgCloud::removeAllPointClouds()
{
if (!geode)
return;
// 移除所有Drawable
geode->removeDrawables(0, geode->getNumDrawables());
// 若需清空Geometry顶点数据
for (unsigned int i = 0; i < geode->getNumDrawables(); ++i)
{
osg::Geometry* geom = dynamic_cast<osg::Geometry*>(geode->getDrawable(i));
if (geom)
{
geom->setVertexArray(new osg::Vec3Array);
geom->dirtyDisplayList();
}
}
}效果是这样的