第5章 数字基带传输系统 学习笔记
文章目录
- [第5章 数字基带传输系统 学习笔记](#第5章 数字基带传输系统 学习笔记)
-
- [5. 无码间干扰基带传输系统的抗噪声性能](#5. 无码间干扰基带传输系统的抗噪声性能)
- [6. 眼图](#6. 眼图)
- [7. 均衡技术](#7. 均衡技术)
- [8. 部分响应技术](#8. 部分响应技术)
-
- [8.1 设计目标](#8.1 设计目标)
- [8.2 设计思想](#8.2 设计思想)
- [8.3 第I类部分响应系统](#8.3 第I类部分响应系统)
- [8.4 第IV类部分响应系统](#8.4 第IV类部分响应系统)
- [8.5 部分响应的一般形式](#8.5 部分响应的一般形式)
- [8.4 第IV类部分响应系统](#8.4 第IV类部分响应系统)
- [8.5 部分响应的一般形式](#8.5 部分响应的一般形式)
5. 无码间干扰基带传输系统的抗噪声性能
前面在不考虑噪声影响时,讨论了无码间串扰的基带传输特性。本节将研究在无码间串扰条件下,由信道噪声引起的误码率。
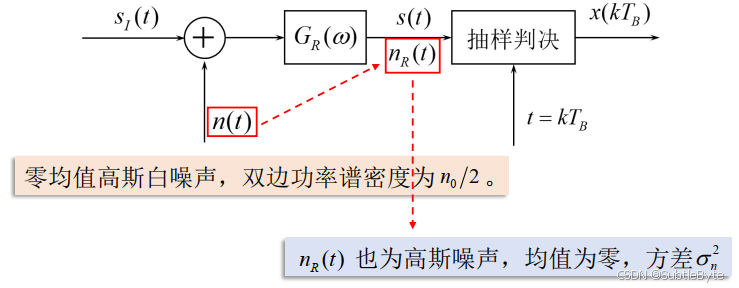
5.1 分析模型
将发送滤波器和信道简略,只从信道端的输出开始考虑,简化分析模型:
假设加性噪声 n ( t ) n(t) n(t)为零均值高斯白噪声。
在无ISI条件下,抽样时刻的输出为:
x ( k T B + t 0 ) = a k h ( t 0 ) + n R ( k T B + t 0 ) x\left(k T_{B}+t_{0}\right)=a_{k} h\left(t_{0}\right)+n_{R}\left(k T_{B}+t_{0}\right) x(kTB+t0)=akh(t0)+nR(kTB+t0)
x ( k T B + t 0 ) = a k h ( t 0 ) + ∑ n ≠ k a n h ( k − n ) T B + t 0 + n R ( k T B + t 0 ) ⇓ I S I = ∑ n ≠ k a n h ( k − n ) T B + t 0 = 0 x ( k T B + t 0 ) = a k h ( t 0 ) + n R ( k T B + t 0 ) \begin{array}{c} x\left(k T_{B}+t_{0}\right)=a_{k} h\left(t_{0}\right)+\sum_{n \neq k} a_{n} h\left(k-n) T_{B}+t_{0}\\right+n_{R}\left(k T_{B}+t_{0}\right) \\ \Downarrow \mathrm{ISI}=\sum_{n \neq k} a_{n} h\left(k-n) T_{B}+t_{0}\\right=0 \\ x\left(k T_{B}+t_{0}\right)=a_{k} h\left(t_{0}\right)+n_{R}\left(k T_{B}+t_{0}\right) \end{array} x(kTB+t0)=akh(t0)+∑n=kanh(k−n)TB+t0+nR(kTB+t0)⇓ISI=∑n=kanh(k−n)TB+t0=0x(kTB+t0)=akh(t0)+nR(kTB+t0)
其中,由于接收滤波器又是一个线性网络,所以 n R ( t ) n_R(t) nR(t)也是零均值高斯噪声
- 它的功率谱密度为:
P n ( f ) = n 0 2 ∣ G R ( f ) ∣ 2 P_{n}(f)=\frac{n_{0}}{2}\left|G_{\mathrm{R}}(f)\right|^{2} Pn(f)=2n0∣GR(f)∣2
- 方差(噪声平均功率)为:
σ n 2 = ∫ − ∞ ∞ n 0 2 ∣ G R ( f ) ∣ 2 d f \sigma_{n}^{2}=\int_{-\infty}^{\infty} \frac{n_{0}}{2}\left|G_{\mathrm{R}}(f)\right|^{2} \mathrm{~d} f σn2=∫−∞∞2n0∣GR(f)∣2 df
- 一维概率密度函数为:
f ( V ) = 1 2 π σ n e − V 2 / 2 σ n 2 f(V)=\frac{1}{\sqrt{2 \pi} \sigma_{n}} \mathrm{e}^{-V^{2} / 2 \sigma_{n}^{2}} f(V)=2π σn1e−V2/2σn2
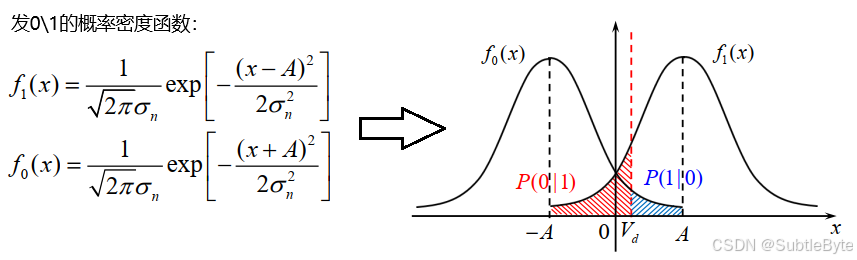
5.2 双极性信号的抗噪声性能
信号模型
x ( k T B ) = { A + n R ( k T B ) 发"1" − A + n R ( k T B ) 发"0" x(kT_B) = \begin{cases} A + n_R(kT_B) & \text{发"1"} \\ -A + n_R(kT_B) & \text{发"0"} \end{cases} x(kTB)={A+nR(kTB)−A+nR(kTB)发"1"发"0"
我们可以得到
判决规则
设有一判决门限 V d V_d Vd
{ x ( k T B ) > V d 判"1" x ( k T B ) < V d 判"0" \begin{cases} x(kT_B) > V_d & \text{判"1"} \\ x(kT_B) < V_d & \text{判"0"} \end{cases} {x(kTB)>Vdx(kTB)<Vd判"1"判"0"
误码率分析
-
发1判0的概率:
P ( 0 ∣ 1 ) = ∫ − ∞ V d f 1 ( x ) d x = 1 2 + 1 2 erf ( V d − A 2 σ n ) P(0|1) = \int_{-\infty}^{V_d} f_1(x) dx = \frac{1}{2} + \frac{1}{2} \text{erf}\left( \frac{V_d - A}{\sqrt{2}\sigma_n} \right) P(0∣1)=∫−∞Vdf1(x)dx=21+21erf(2 σnVd−A) -
发0判1的概率:
P ( 1 ∣ 0 ) = ∫ V d + ∞ f 0 ( x ) d x = 1 2 − 1 2 erf ( V d + A 2 σ n ) P(1|0) = \int_{V_d}^{+\infty} f_0(x) dx = \frac{1}{2} - \frac{1}{2} \text{erf}\left( \frac{V_d + A}{\sqrt{2}\sigma_n} \right) P(1∣0)=∫Vd+∞f0(x)dx=21−21erf(2 σnVd+A) -
总误码率:
P e = P ( 1 ) P ( 0 ∣ 1 ) + P ( 0 ) P ( 1 ∣ 0 ) = P ( 1 ) 1 2 + 1 2 erf ( V d − A 2 σ n ) + P ( 0 ) 1 2 − 1 2 erf ( V d + A 2 σ n ) P_{e}=P(1) P(0 \mid 1)+P(0) P(1 \mid 0)=P(1)\left\\frac{1}{2}+\\frac{1}{2} \\operatorname{erf}\\left(\\frac{V_{d}-A}{\\sqrt{2} \\sigma_{n}}\\right)\\right+P(0)\left\\frac{1}{2}-\\frac{1}{2} \\operatorname{erf}\\left(\\frac{V_{d}+A}{\\sqrt{2} \\sigma_{n}}\\right)\\right Pe=P(1)P(0∣1)+P(0)P(1∣0)=P(1)21+21erf(2 σnVd−A)+P(0)21−21erf(2 σnVd+A)
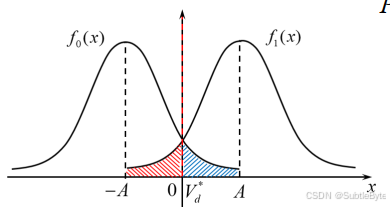
最佳判决门限
V d ∗ = σ n 2 2 A ln P ( 0 ) P ( 1 ) V_d^* = \frac{\sigma_n^2}{2A} \ln \frac{P(0)}{P(1)} Vd∗=2Aσn2lnP(1)P(0)
推导:
已知: P e = P ( 1 ) ⋅ ∫ − ∞ V d f 1 ( x ) d x + P ( 0 ) ⋅ ∫ V d + ∞ f 0 ( x ) d x P_{e} =P(1) \cdot \int_{-\infty}^{V_{d}} f_{1}(x) \mathrm{d} x+P(0) \cdot \int_{V_{d}}^{+\infty} f_{0}(x) \mathrm{d} x Pe=P(1)⋅∫−∞Vdf1(x)dx+P(0)⋅∫Vd+∞f0(x)dx当 P ( 1 ) P(1) P(1)、 P ( 0 ) P(0) P(0)、 f 1 ( x ) f_1(x) f1(x)、 f 0 ( x ) f_0(x) f0(x)已知的情况下 P e P_e Pe是一个关于 V d V_d Vd的式子。求 P e P_e Pe关于 V d V_d Vd的偏导,令其为0,即可求解。
∂ P e ∂ V d = 0 P ( 1 ) f 1 ( V d ∗ ) − P ( 0 ) f 0 ( V d ∗ ) = 0 \frac{\partial P_{e}}{\partial V_{d}}=0 \quad P(1) f_{1}\left(V_{d}^{*}\right)-P(0) f_{0}\left(V_{d}^{*}\right)=0 ∂Vd∂Pe=0P(1)f1(Vd∗)−P(0)f0(Vd∗)=0
特殊情况:等概时( P ( 0 ) = P ( 1 ) = 1 / 2 P(0)=P(1)=1/2 P(0)=P(1)=1/2): V d ∗ = 0 V_d^* = 0 Vd∗=0
此时的总误码率为:
P e = 1 2 erfc ( A 2 σ n ) P_e = \frac{1}{2} \text{erfc}\left( \frac{A}{\sqrt{2}\sigma_n} \right) Pe=21erfc(2 σnA)
5.3 单极性信号的抗噪声性能
信号模型
x ( k T B ) = { A + n R ( k T B ) 发"1" n R ( k T B ) 发"0" x(kT_B) = \begin{cases} A + n_R(kT_B) & \text{发"1"} \\ n_R(kT_B) & \text{发"0"} \end{cases} x(kTB)={A+nR(kTB)nR(kTB)发"1"发"0"
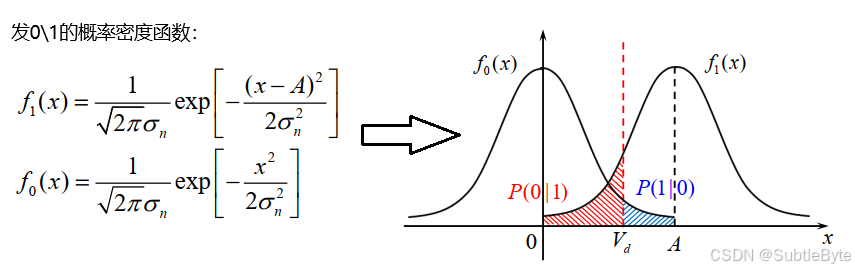
误码率分析
- 发1判0的概率:
P ( 0 ∣ 1 ) = 1 2 + 1 2 erf ( V d − A 2 σ n ) P(0|1) = \frac{1}{2} + \frac{1}{2} \text{erf}\left( \frac{V_d - A}{\sqrt{2}\sigma_n} \right) P(0∣1)=21+21erf(2 σnVd−A) - 发0判1的概率:
P ( 1 ∣ 0 ) = 1 2 − 1 2 erf ( V d 2 σ n ) P(1|0) = \frac{1}{2} - \frac{1}{2} \text{erf}\left( \frac{V_d}{\sqrt{2}\sigma_n} \right) P(1∣0)=21−21erf(2 σnVd)
最佳判决门限
V d ∗ = A 2 + σ n 2 A ln P ( 0 ) P ( 1 ) V_d^* = \frac{A}{2} + \frac{\sigma_n^2}{A} \ln \frac{P(0)}{P(1)} Vd∗=2A+Aσn2lnP(1)P(0)
等概时: V d ∗ = A / 2 V_d^* = A/2 Vd∗=A/2
总误码率(等概时)
P e = 1 2 erfc ( A 2 2 σ n ) P_e = \frac{1}{2} \text{erfc}\left( \frac{A}{2\sqrt{2}\sigma_n} \right) Pe=21erfc(22 σnA)
5.4 性能对比
| 比较项目 | 双极性信号 | 单极性信号 |
|---|---|---|
| 数学表达式 | x ( k T B ) = { A + n R ( k T B ) 发"1" − A + n R ( k T B ) 发"0" x(kT_B) = \begin{cases} A + n_R(kT_B) & \text{发"1"} \\ -A + n_R(kT_B) & \text{发"0"} \end{cases} x(kTB)={A+nR(kTB)−A+nR(kTB)发"1"发"0" | x ( k T B ) = { A + n R ( k T B ) 发"1" n R ( k T B ) 发"0" x(kT_B) = \begin{cases} A + n_R(kT_B) & \text{发"1"} \\ n_R(kT_B) & \text{发"0"} \end{cases} x(kTB)={A+nR(kTB)nR(kTB)发"1"发"0" |
| 最佳判决门限 | V d ∗ = σ n 2 2 A ln P ( 0 ) P ( 1 ) V_d^* = \frac{\sigma_n^2}{2A} \ln \frac{P(0)}{P(1)} Vd∗=2Aσn2lnP(1)P(0) | V d ∗ = A 2 + σ n 2 A ln P ( 0 ) P ( 1 ) V_d^* = \frac{A}{2} + \frac{\sigma_n^2}{A} \ln \frac{P(0)}{P(1)} Vd∗=2A+Aσn2lnP(1)P(0) |
| 等概时门限 | V d ∗ = 0 V_d^* = 0 Vd∗=0 | V d ∗ = A 2 V_d^* = \frac{A}{2} Vd∗=2A |
| 误码率 (发"1"判"0") | $$P(0 | 1) = \frac{1}{2} + \frac{1}{2} \text{erf}\left( \frac{V_d - A}{\sqrt{2}\sigma_n} \right)$$ |
| 误码率 (发"0"判"1") | $$P(1 | 0) = \frac{1}{2} - \frac{1}{2} \text{erf}\left( \frac{V_d + A}{\sqrt{2}\sigma_n} \right)$$ |
| 总误码率 (一般情况) | P e = P ( 1 ) 1 2 + 1 2 erf ( V d − A 2 σ n ) + P ( 0 ) 1 2 − 1 2 erf ( V d + A 2 σ n ) P_e = P(1)\left\\frac{1}{2}+\\frac{1}{2} \\operatorname{erf}\\left(\\frac{V_{d}-A}{\\sqrt{2} \\sigma_{n}}\\right)\\right+P(0)\left\\frac{1}{2}-\\frac{1}{2} \\operatorname{erf}\\left(\\frac{V_{d}+A}{\\sqrt{2} \\sigma_{n}}\\right)\\right Pe=P(1)21+21erf(2 σnVd−A)+P(0)21−21erf(2 σnVd+A) | P e = P ( 1 ) 1 2 + 1 2 erf ( V d − A 2 σ n ) + P ( 0 ) 1 2 − 1 2 erf ( V d 2 σ n ) P_e = P(1)\left\\frac{1}{2}+\\frac{1}{2} \\operatorname{erf}\\left(\\frac{V_{d}-A}{\\sqrt{2} \\sigma_{n}}\\right)\\right+P(0)\left\\frac{1}{2}-\\frac{1}{2} \\operatorname{erf}\\left(\\frac{V_{d}}{\\sqrt{2} \\sigma_{n}}\\right)\\right Pe=P(1)21+21erf(2 σnVd−A)+P(0)21−21erf(2 σnVd) |
| 总误码率 (等概情况) | P e = 1 2 erfc ( A 2 σ n ) P_e = \frac{1}{2} \text{erfc}\left( \frac{A}{\sqrt{2}\sigma_n} \right) Pe=21erfc(2 σnA) | P e = 1 2 erfc ( A 2 2 σ n ) P_e = \frac{1}{2} \text{erfc}\left( \frac{A}{2\sqrt{2}\sigma_n} \right) Pe=21erfc(22 σnA) |
| 直流分量 | 无直流分量 | 有直流分量 |
-
相同 A / σ n A/\sigma_n A/σn:双极性系统的误码率低于单极性系统
直观理解:双极性信号噪声容限更大,故抗噪声性能更强
-
当符号先验等概时,单极性信号的最佳判决门限会随着信道特性变化而变化;双极性信号的最佳判决门限不随信道特性变化
-
抗噪声性能:双极性优于单极性(噪声容限更大)
6. 眼图
-
眼图的概念
将接收滤波器的输出信号连接到示波器的垂直输入端,同时调整水平扫描周期为码元周期 T B T_B TB,在示波器上显示的图形称为眼图。
-
眼图的作用
- 定性估计系统性能优劣
- 反映码间干扰和噪声的强弱
- 指导接收滤波器的调整
-
眼图的特征参数
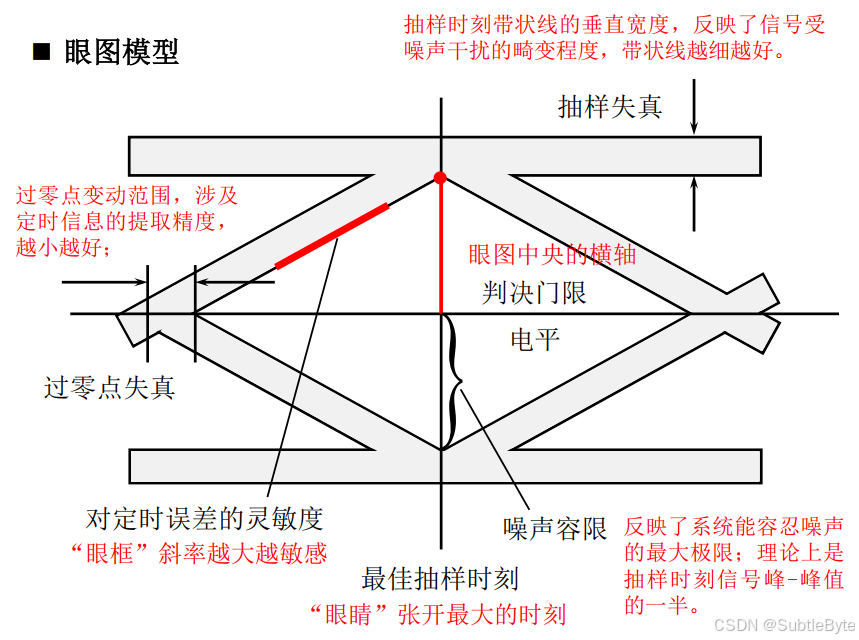
- 最佳抽样时刻:眼睛张开最大的时刻
- 判决门限:眼图中央的横轴位置
- 噪声容限:抽样时刻信号峰-峰值的一半
- 抽样失真:抽样时刻迹线的垂直宽度(反映噪声影响)
- 过零点失真:过零点变动范围(影响定时提取精度)
- 对定时误差的灵敏度:"眼框"斜率越大,对定时误差越敏感
-
眼图与信号类型的关系
- 二进制双极性波形:一个码元周期内看到一只眼睛
- M进制双极性波形 :一个码元周期内看到 ( M − 1 ) (M-1) (M−1) 只眼睛
- AMI码或HDB₃码:三电平,眼图中间有代表连0的水平线
- 扫描周期为 n T B nT_B nTB :看到并排的 n n n 只眼睛
-
最佳眼图特征
- "眼睛"张开大且端正 → ISI小
- 迹线清晰 → 噪声小
- 总结:单眼皮大眼睛------最佳眼图
7. 均衡技术
这是一种改善系统性能的措施
7.1 均衡的目的
减小或消除码间干扰(ISI),校正系统传输特性。
均衡的目的是为了减小码间干扰。因为数字基带系统由三部分组成:发滤波器、信道和收滤波器。信道特性的变化以及收发滤波器的设计不良,都使得整个系统的传输特性很难直接满足无码间干扰条件。因此,我们需要一种方法使系统经过处理后满足无码间干扰条件。均衡的思想就是在基带系统和抽样判决器之间串联一个均衡器。
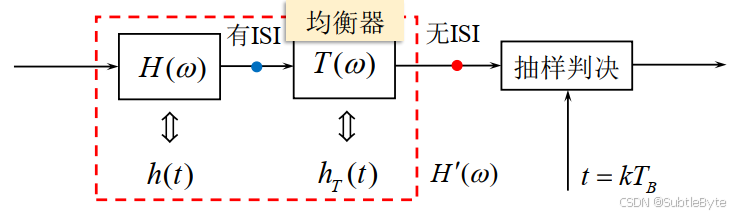
在基带系统和抽样判决器之间级联均衡器。均衡器为可调或不可调的滤波器,用于校正或补偿系统特性,减小码间干扰
7.2 均衡方法分类
-
频域均衡
通过频率校正使均衡后系统特性满足奈奎斯特第一准则:
H ( ω ) ⋅ T ( ω ) = H ′ ( ω ) H(\omega) \cdot T(\omega) = H'(\omega) H(ω)⋅T(ω)=H′(ω)满足:
∑ i H ′ ( ω + 2 π i T B ) = T B ∣ ω ∣ ≤ π T B \sum_i H'\left( \omega + \frac{2\pi i}{T_B} \right) = T_B \quad |\omega| \leq \frac{\pi}{T_B} i∑H′(ω+TB2πi)=TB∣ω∣≤TBπ -
时域均衡
使有码间干扰的冲激响应波形 h ( t ) h(t) h(t)变换后无码间干扰:
h ( t ) ∗ h T ( t ) = h ′ ( t ) h(t) * h_T(t) = h'(t) h(t)∗hT(t)=h′(t)其中:
h ′ ( k T B ) = { 1 k = 0 0 k ≠ 0 h'(kT_B) = \begin{cases} 1 & k=0 \\ 0 & k\neq 0 \end{cases} h′(kTB)={10k=0k=0
7.3 时域均衡原理
横向滤波器结构
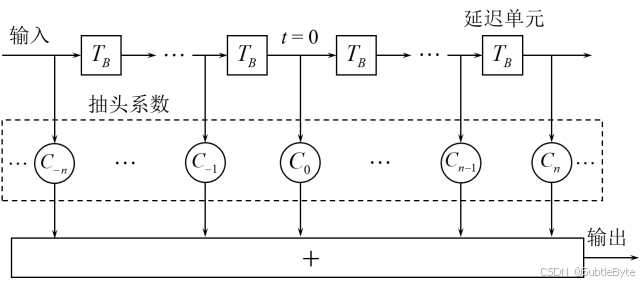
时域均衡器通常采用横向滤波器实现,其冲击响应为:
h T ( t ) = ∑ n = − ∞ + ∞ C n δ ( t − n T B ) h_T(t) = \sum_{n=-\infty}^{+\infty} C_n \delta(t - nT_B) hT(t)=n=−∞∑+∞Cnδ(t−nTB)
冲激响应的表达式可等效为一个由无限多的横向排列延时单元 T B T_B TB和加权系数 C n C_n Cn组成的系统,称为横向滤波器
对应的传递函数:
T ( ω ) = ∑ n = − ∞ + ∞ C n e − j ω n T B T(\omega) = \sum_{n=-\infty}^{+\infty} C_n e^{-j\omega nT_B} T(ω)=n=−∞∑+∞Cne−jωnTB
依赖 H ( ω ) H(\omega) H(ω)确定均衡器抽头系数 C n C_n Cn, 可实现无ISI传输。 证明略
由此,我们可以知道,当输入信号为 x ( t ) x(t) x(t)时,输出信号为:
y ( t ) = x ( t ) ∗ h T ( t ) = ∑ n = − ∞ + ∞ C n x ( t − n T B ) y(t)=x(t)*h_T(t)=\sum_{n=-\infty}^{+\infty}{C_nx(t-nT_B)} y(t)=x(t)∗hT(t)=n=−∞∑+∞Cnx(t−nTB)
有限长横向滤波器
无限多抽头的横向滤波器可以完全消除码间干扰,但物理不可实现,受体积、成本、抽头系数精度调整等制约。实际中采用 2 N + 1 2N+1 2N+1 抽头的横向滤波器:
- 冲激响应: e ( t ) = ∑ i = − N N C i δ ( t − i T B ) e(t) = \sum_{i=-N}^{N} C_i \delta(t - iT_B) e(t)=∑i=−NNCiδ(t−iTB)
- 输出信号: y ( t ) = ∑ i = − N N C i x ( t − i T B ) y(t) = \sum_{i=-N}^{N} C_i x(t - iT_B) y(t)=∑i=−NNCix(t−iTB)
- 抽样值: y k = ∑ i = − N N C i x k − i y_k = \sum_{i=-N}^{N} C_i x_{k-i} yk=∑i=−NNCixk−i
- y 0 y_0 y0:本码元抽样值
- y k y_k yk:码间干扰ISI
有限长横向滤波器可以减小但不能完全消除ISI。
7.4 均衡效果衡量准则
- 峰值失真准则
D = 1 y 0 ∑ k ≠ 0 ∣ y k ∣ D = \frac{1}{y_0} \sum_{k \neq 0} |y_k| D=y01k=0∑∣yk∣
式中,除 k = 0 k=0 k=0以外的各值的绝对值之和反映了码间串扰的最大值。 y 0 y_0 y0是有用信号样值,所以峰值失真 D D D是码间串扰最大可能值(峰值)与有用信号样值之比
- 均方失真准则
e 2 = 1 y 0 2 ∑ k ≠ 0 y k 2 e^2 = \frac{1}{y_0^2} \sum_{k \neq 0} y_k^2 e2=y021k=0∑yk2
其物理意义与峰值失真相似。
- 总结
- 峰值失真或均方失真越小,均衡效果越好,当峰值失真或均方失真为0时,无码间干扰。
- 注意:以上两种准则都是根据均衡器输出的单个脉冲响应来规定的。另外,还有必要指出,在分析横向滤波器时,我们均把时间原点(t=0)假设在滤波器中心点处(即 C 0 C_0 C0处)。如果时间参考点选择在别处,则滤波器输出的波形形状是相同的,所不同的仅仅是整个波形的提前或推迟。
7.5 迫零均衡算法(ZF)
均衡器的设计目标就是按照某种算法或者准则,求出均衡器的抽头系数,使本码元之外的所有样值 y k y_k yk为0或者趋近于0, 从而消除或减小码间干扰
-
算法思想
调整抽头系数,迫使本码元前后各 N N N 个抽样值为零。
-
抽头系数求解
当初始失真 D 0 < 1 D_0 < 1 D0<1 时,抽头系数满足:
y k = { 0 k = ± 1 , ± 2 , ⋯ , ± N 1 k = 0 y_k = \begin{cases} 0 & k = \pm 1, \pm 2, \cdots, \pm N \\ 1 & k = 0 \end{cases} yk={01k=±1,±2,⋯,±Nk=0
写成矩阵形式:
X C = Y \mathbf{X} \mathbf{C} = \mathbf{Y} XC=Y
其中 Y = 0 , ⋯ , 0 , 1 , 0 , ⋯ , 0 T \mathbf{Y} = 0, \\cdots, 0, 1, 0, \\cdots, 0^T Y=0,⋯,0,1,0,⋯,0T(仅第 N + 1 N+1 N+1 个元素为1)。
- 特点
- 可完全消除 2 N 2N 2N 个抽样点上的ISI
- 未考虑噪声影响,可能放大噪声(特别是信道深衰落时)
8. 部分响应技术
8.1 设计目标
- 提高频带利用率(达到理论极限2 Baud/Hz)
- 改善频谱特性
- 加快响应波形尾部衰减,降低对定时要求
8.2 设计思想
有控制地在某些抽样时刻引入确知的码间干扰,在接收端根据已知规则消除ISI。
8.3 第I类部分响应系统
设计思路
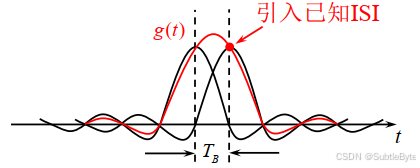
我们已经熟知,波形"sinx/x"拖尾严重。但通过观察sinx/x波形,我们发现相距一个码元间隔的两个sinx/x波形的"拖尾"刚好正负相反,利用这样的波形组合肯定可以构成"拖尾"衰减很快的脉冲波形,依据这个思路,将两个相距 T B T_B TB 的 Sa ( π t / T B ) \text{Sa}(\pi t/T_B) Sa(πt/TB) 波形相加,得到新的响应波形:
g ( t ) = sin ( π t / T B ) π t / T B + sin π ( t − T B ) / T B π ( t − T B ) / T B g(t) = \frac{\sin(\pi t/T_B)}{\pi t/T_B} + \frac{\sin\\pi (t-T_B)/T_B}{\pi (t-T_B)/T_B} g(t)=πt/TBsin(πt/TB)+π(t−TB)/TBsinπ(t−TB)/TB
抽样特性:
g ( k T B ) = { 1 k = 0 , 1 0 其他整数 k g(kT_B) = \begin{cases} 1 & k=0,1 \\ 0 & \text{其他整数 } k \end{cases} g(kTB)={10k=0,1其他整数 k
实现方法:相关编码
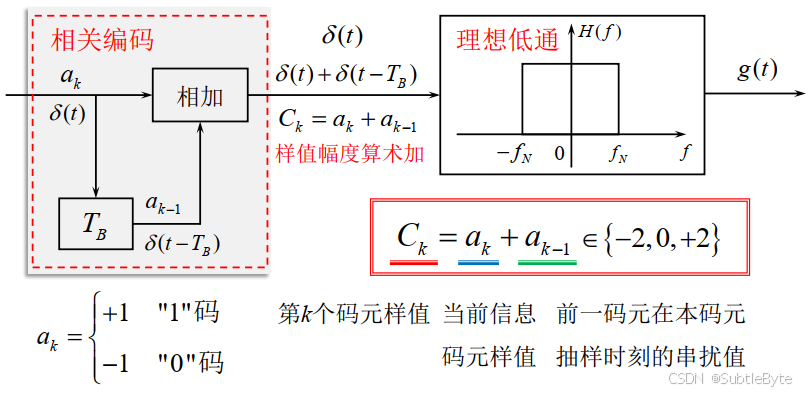
频谱特性
- 系统带宽: B = 1 / ( 2 T B ) = f N B = 1/(2T_B) = f_N B=1/(2TB)=fN
- 频带利用率: η = R B / B = 2 \eta = R_B/B = 2 η=RB/B=2 Baud/Hz
- 幅频特性: ∣ G ( ω ) ∣ = 2 T B cos ( ω T B / 2 ) |G(\omega)| = 2T_B \cos(\omega T_B/2) ∣G(ω)∣=2TBcos(ωTB/2), ∣ ω ∣ ≤ π / T B |\omega| \leq \pi/T_B ∣ω∣≤π/TB
预编码与模2判决
为避免差错传播,采用预编码:
- 预编码: b k = a k ⊕ b k − 1 b_k = a_k \oplus b_{k-1} bk=ak⊕bk−1
- 相关编码: C k = b k + b k − 1 C_k = b_k + b_{k-1} Ck=bk+bk−1(算术加)
- 模2判决: a k = C k mod 2 a_k = C_k_{\text{mod } 2} ak=Ckmod 2
判决规则:
- C k = ± 2 C_k = \pm 2 Ck=±2 → 判"0"
- C k = 0 C_k = 0 Ck=0 → 判"1"
8.4 第IV类部分响应系统
基本原理
当前码元只对下一个码元产生干扰:
g ( t ) = sin ( π t / T B ) π t / T B − sin π ( t − 2 T B ) / T B π ( t − 2 T B ) / T B g(t) = \frac{\sin(\pi t/T_B)}{\pi t/T_B} - \frac{\sin\\pi (t-2T_B)/T_B}{\pi (t-2T_B)/T_B} g(t)=πt/TBsin(πt/TB)−π(t−2TB)/TBsinπ(t−2TB)/TB
系统结构
- 预编码: b k = a k ⊕ b k − 2 b_k = a_k \oplus b_{k-2} bk=ak⊕bk−2
- 相关编码: C k = b k − b k − 2 C_k = b_k - b_{k-2} Ck=bk−bk−2
- 模2判决: a k = C k mod 2 a_k = C_k_{\text{mod } 2} ak=Ckmod 2
频谱特性
- 系统带宽: B = 1 / ( 2 T B ) = f N B = 1/(2T_B) = f_N B=1/(2TB)=fN
- 频带利用率: η = 2 \eta = 2 η=2 Baud/Hz
- 幅频特性: ∣ G ( ω ) ∣ = 2 T B sin ( ω T B ) |G(\omega)| = 2T_B \sin(\omega T_B) ∣G(ω)∣=2TBsin(ωTB), ∣ ω ∣ ≤ π / T B |\omega| \leq \pi/T_B ∣ω∣≤π/TB
- 特点:无直流分量,低频分量小
8.5 部分响应的一般形式
时域表达式
g ( t ) = ∑ m = 1 N R m sin π ( t − ( m − 1 ) T B ) / T B π t − ( m − 1 ) T B / T B g(t) = \sum_{m=1}^{N} R_m \frac{\sin\\pi (t - (m-1)T_B)/T_B}{\pi t - (m-1)T_B/T_B} g(t)=m=1∑NRmπt−(m−1)TB/TBsinπ(t−(m−1)TB)/TB
频域表达式
G ( ω ) = { T B ∑ m = 1 N R m e − j ω ( m − 1 ) T B ∣ ω ∣ ≤ π / T B 0 ∣ ω ∣ > π / T B G(\omega) = \begin{cases} T_B \sum_{m=1}^{N} R_m e^{-j\omega (m-1)T_B} & |\omega| \leq \pi/T_B \\ 0 & |\omega| > \pi/T_B \end{cases} G(ω)={TB∑m=1NRme−jω(m−1)TB0∣ω∣≤π/TB∣ω∣>π/TB
系统结构
- 预编码: a k = R 1 b k + R 2 b k − 1 + ⋯ + R N b k − ( N − 1 ) a_k = R_1 b_k + R_2 b_{k-1} + \cdots + R_N b_{k-(N-1)} ak=R1bk+R2bk−1+⋯+RNbk−(N−1)(模L加)
- 相关编码: C k = R 1 b k + R 2 b k − 1 + ⋯ + R N b k − ( N − 1 ) C_k = R_1 b_k + R_2 b_{k-1} + \cdots + R_N b_{k-(N-1)} Ck=R1bk+R2bk−1+⋯+RNbk−(N−1)(算术加)
- 模L判决: a k = C k mod L a_k = C_k_{\text{mod } L} ak=Ckmod L
对于L进制输入,第I、IV类部分响应信号的电平数为 2 L − 1 2L-1 2L−1。
2判决
为避免差错传播,采用预编码:
- 预编码: b k = a k ⊕ b k − 1 b_k = a_k \oplus b_{k-1} bk=ak⊕bk−1
- 相关编码: C k = b k + b k − 1 C_k = b_k + b_{k-1} Ck=bk+bk−1(算术加)
- 模2判决: a k = C k mod 2 a_k = C_k_{\text{mod } 2} ak=Ckmod 2
判决规则:
- C k = ± 2 C_k = \pm 2 Ck=±2 → 判"0"
- C k = 0 C_k = 0 Ck=0 → 判"1"
8.4 第IV类部分响应系统
基本原理
当前码元只对下一个码元产生干扰:
g ( t ) = sin ( π t / T B ) π t / T B − sin π ( t − 2 T B ) / T B π ( t − 2 T B ) / T B g(t) = \frac{\sin(\pi t/T_B)}{\pi t/T_B} - \frac{\sin\\pi (t-2T_B)/T_B}{\pi (t-2T_B)/T_B} g(t)=πt/TBsin(πt/TB)−π(t−2TB)/TBsinπ(t−2TB)/TB
系统结构
- 预编码: b k = a k ⊕ b k − 2 b_k = a_k \oplus b_{k-2} bk=ak⊕bk−2
- 相关编码: C k = b k − b k − 2 C_k = b_k - b_{k-2} Ck=bk−bk−2
- 模2判决: a k = C k mod 2 a_k = C_k_{\text{mod } 2} ak=Ckmod 2
频谱特性
- 系统带宽: B = 1 / ( 2 T B ) = f N B = 1/(2T_B) = f_N B=1/(2TB)=fN
- 频带利用率: η = 2 \eta = 2 η=2 Baud/Hz
- 幅频特性: ∣ G ( ω ) ∣ = 2 T B sin ( ω T B ) |G(\omega)| = 2T_B \sin(\omega T_B) ∣G(ω)∣=2TBsin(ωTB), ∣ ω ∣ ≤ π / T B |\omega| \leq \pi/T_B ∣ω∣≤π/TB
- 特点:无直流分量,低频分量小
8.5 部分响应的一般形式
时域表达式
g ( t ) = ∑ m = 1 N R m sin π ( t − ( m − 1 ) T B ) / T B π t − ( m − 1 ) T B / T B g(t) = \sum_{m=1}^{N} R_m \frac{\sin\\pi (t - (m-1)T_B)/T_B}{\pi t - (m-1)T_B/T_B} g(t)=m=1∑NRmπt−(m−1)TB/TBsinπ(t−(m−1)TB)/TB
频域表达式
G ( ω ) = { T B ∑ m = 1 N R m e − j ω ( m − 1 ) T B ∣ ω ∣ ≤ π / T B 0 ∣ ω ∣ > π / T B G(\omega) = \begin{cases} T_B \sum_{m=1}^{N} R_m e^{-j\omega (m-1)T_B} & |\omega| \leq \pi/T_B \\ 0 & |\omega| > \pi/T_B \end{cases} G(ω)={TB∑m=1NRme−jω(m−1)TB0∣ω∣≤π/TB∣ω∣>π/TB
系统结构
- 预编码: a k = R 1 b k + R 2 b k − 1 + ⋯ + R N b k − ( N − 1 ) a_k = R_1 b_k + R_2 b_{k-1} + \cdots + R_N b_{k-(N-1)} ak=R1bk+R2bk−1+⋯+RNbk−(N−1)(模L加)
- 相关编码: C k = R 1 b k + R 2 b k − 1 + ⋯ + R N b k − ( N − 1 ) C_k = R_1 b_k + R_2 b_{k-1} + \cdots + R_N b_{k-(N-1)} Ck=R1bk+R2bk−1+⋯+RNbk−(N−1)(算术加)
- 模L判决: a k = C k mod L a_k = C_k_{\text{mod } L} ak=Ckmod L
对于L进制输入,第I、IV类部分响应信号的电平数为 2 L − 1 2L-1 2L−1。
由于字数限制,第二部分在博客
笔记总结内容来自:通信原理 主讲:张锦皓 https://www.bilibili.com/video/BV1wA4y1f7Co?vd_source=a9099c2bbd4e16de0bbe08d30051754a