三电平T型逆变器仿真模型,npc和anpc都有 带中点电位平衡和不平衡的都有,60和90度坐标系 MATLAB Simulink SVPWM控制+中点不平衡控制; 合成时间调制波与载波进行比较,产生脉冲信号。 中点电位平衡控制采用零序分量注入控制 具体输出波形见下面图片;
在电力电子领域,三电平T型逆变器因其诸多优势而备受关注。今天咱们就来聊聊基于MATLAB Simulink搭建的三电平T型逆变器仿真模型,这里面涵盖了NPC(中性点箝位)和ANPC(有源中性点箝位)两种类型,还涉及中点电位平衡和不平衡的情况,并且在60度与90度坐标系下进行研究,控制策略采用SVPWM控制搭配中点不平衡控制。
SVPWM控制 + 中点不平衡控制
SVPWM(空间矢量脉宽调制)控制是一种较为先进的调制策略,它通过合成时间调制波与载波进行比较,进而产生脉冲信号来控制逆变器的开关器件。
咱们来看一段简单的SVPWM控制代码示例(Matlab伪代码):
matlab
% 定义参数
T = 0.001; % 采样周期
N = 1/T; % 采样点数
alpha = 0; % 初始相位
omega = 2*pi*50; % 角频率,50Hz
% 生成三相参考电压
for k = 1:N
Va_ref(k) = sqrt(2)*220*cos(omega*(k - 1)*T + alpha);
Vb_ref(k) = sqrt(2)*220*cos(omega*(k - 1)*T + alpha - 2*pi/3);
Vc_ref(k) = sqrt(2)*220*cos(omega*(k - 1)*T + alpha + 2*pi/3);
end
% SVPWM算法核心部分
for k = 1:N
% 计算扇区
% 具体计算扇区代码省略,可根据参考电压矢量位置判断
sector = calculateSector(Va_ref(k), Vb_ref(k), Vc_ref(k));
% 计算作用时间
[Ta, Tb, Tc] = calculateTime(Va_ref(k), Vb_ref(k), Vc_ref(k), sector);
% 生成脉冲信号
% 利用Ta, Tb, Tc生成对应开关器件的脉冲信号
% 代码省略
end在这段代码中,首先定义了一些基本参数,如采样周期、角频率等,接着生成三相参考电压。SVPWM算法的核心在于计算扇区以及每个扇区内基本矢量的作用时间,最后利用这些时间信息生成脉冲信号去控制逆变器开关。
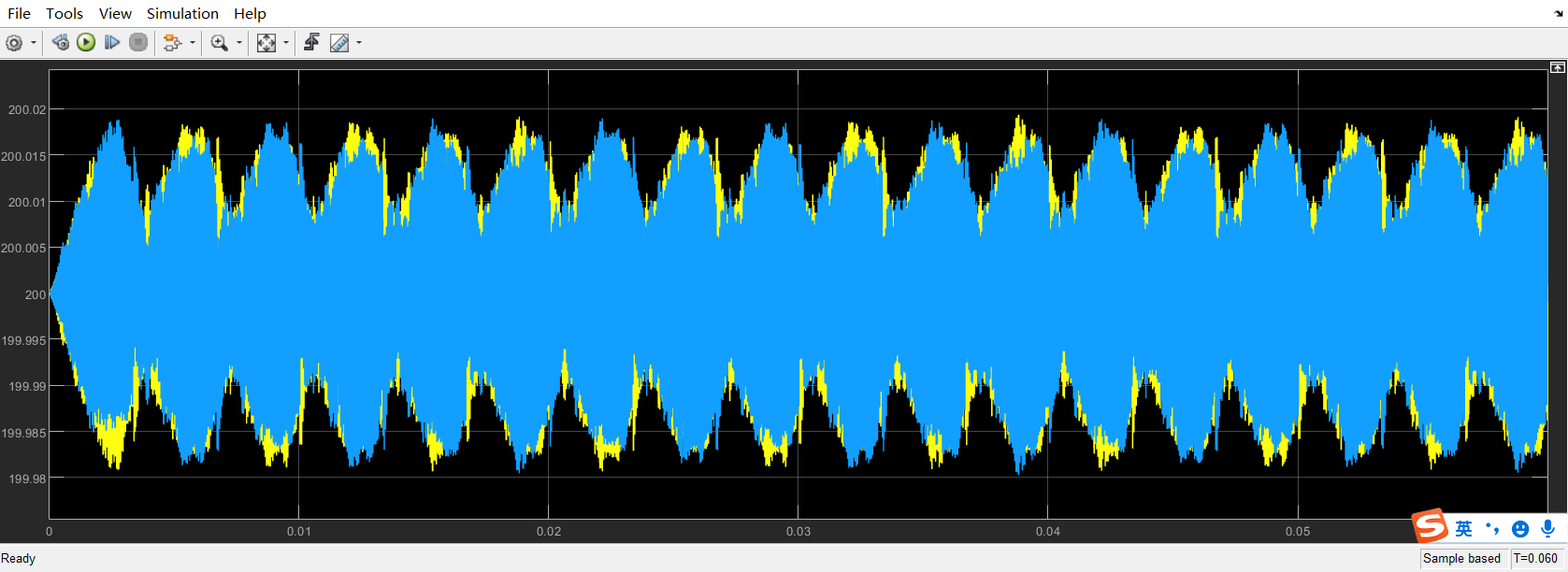
而中点不平衡控制则是与SVPWM相辅相成,在三电平逆变器中,中点电位容易出现波动,中点不平衡控制就致力于解决这个问题。
中点电位平衡控制:零序分量注入控制
中点电位平衡控制采用零序分量注入控制方法。简单来说,就是在三相参考电压中注入零序分量,使得中点电位能够保持平衡。
以下是零序分量注入的代码示意(Matlab伪代码):
matlab
% 计算零序分量
V0 = -(max([Va_ref; Vb_ref; Vc_ref]) + min([Va_ref; Vb_ref; Vc_ref]))/2;
% 注入零序分量
Va_ref_new = Va_ref + V0;
Vb_ref_new = Vb_ref + V0;
Vc_ref_new = Vc_ref + V0;这里通过计算得到零序分量 V0,然后将其分别加到三相参考电压上,形成新的参考电压 Varefnew、Vbrefnew、Vcrefnew,从而实现中点电位平衡控制。
NPC和ANPC仿真模型
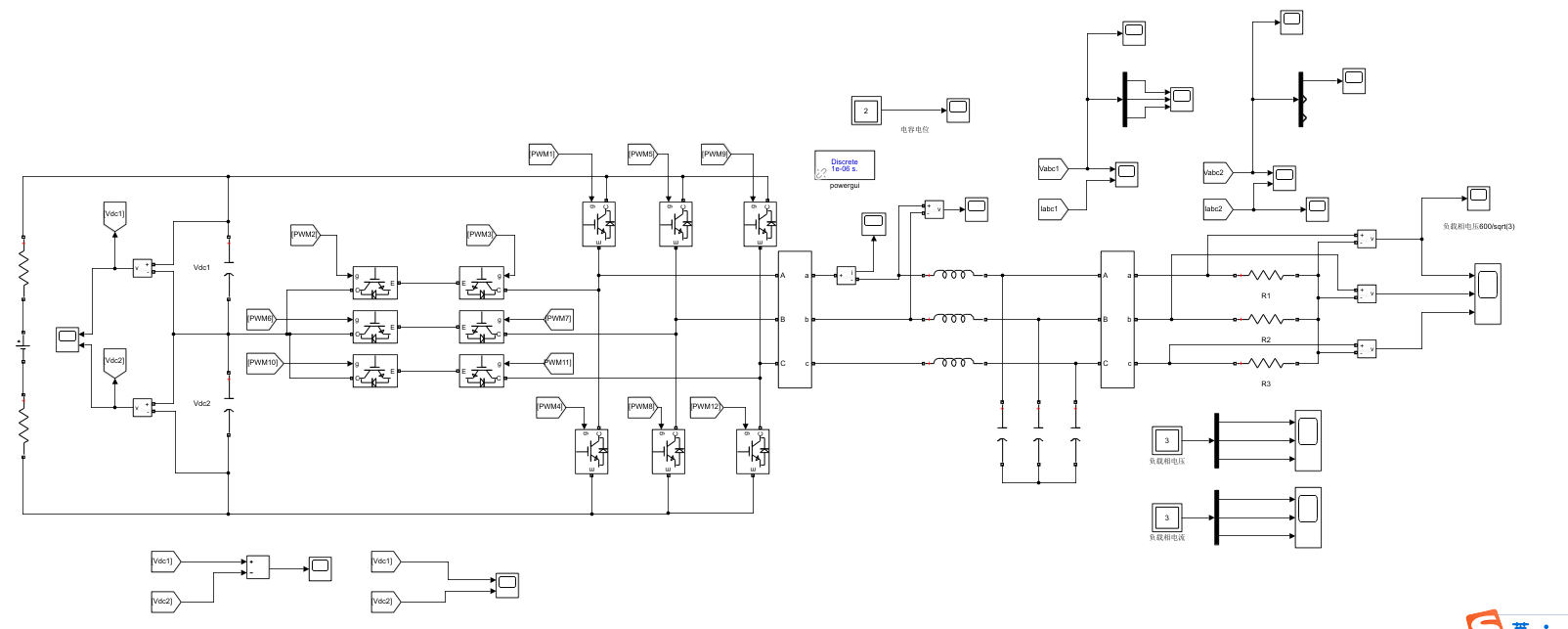
在MATLAB Simulink中搭建NPC和ANPC的三电平T型逆变器仿真模型,这两种结构虽然都是三电平,但在开关器件的配置和控制上存在差异。
三电平T型逆变器仿真模型,npc和anpc都有 带中点电位平衡和不平衡的都有,60和90度坐标系 MATLAB Simulink SVPWM控制+中点不平衡控制; 合成时间调制波与载波进行比较,产生脉冲信号。 中点电位平衡控制采用零序分量注入控制 具体输出波形见下面图片;
对于NPC模型,其特点是通过二极管箝位实现中点电位的箝位。而ANPC模型则是在NPC基础上采用了有源器件来箝位中点电位,相比NPC,ANPC在控制灵活性和效率上有一定提升。
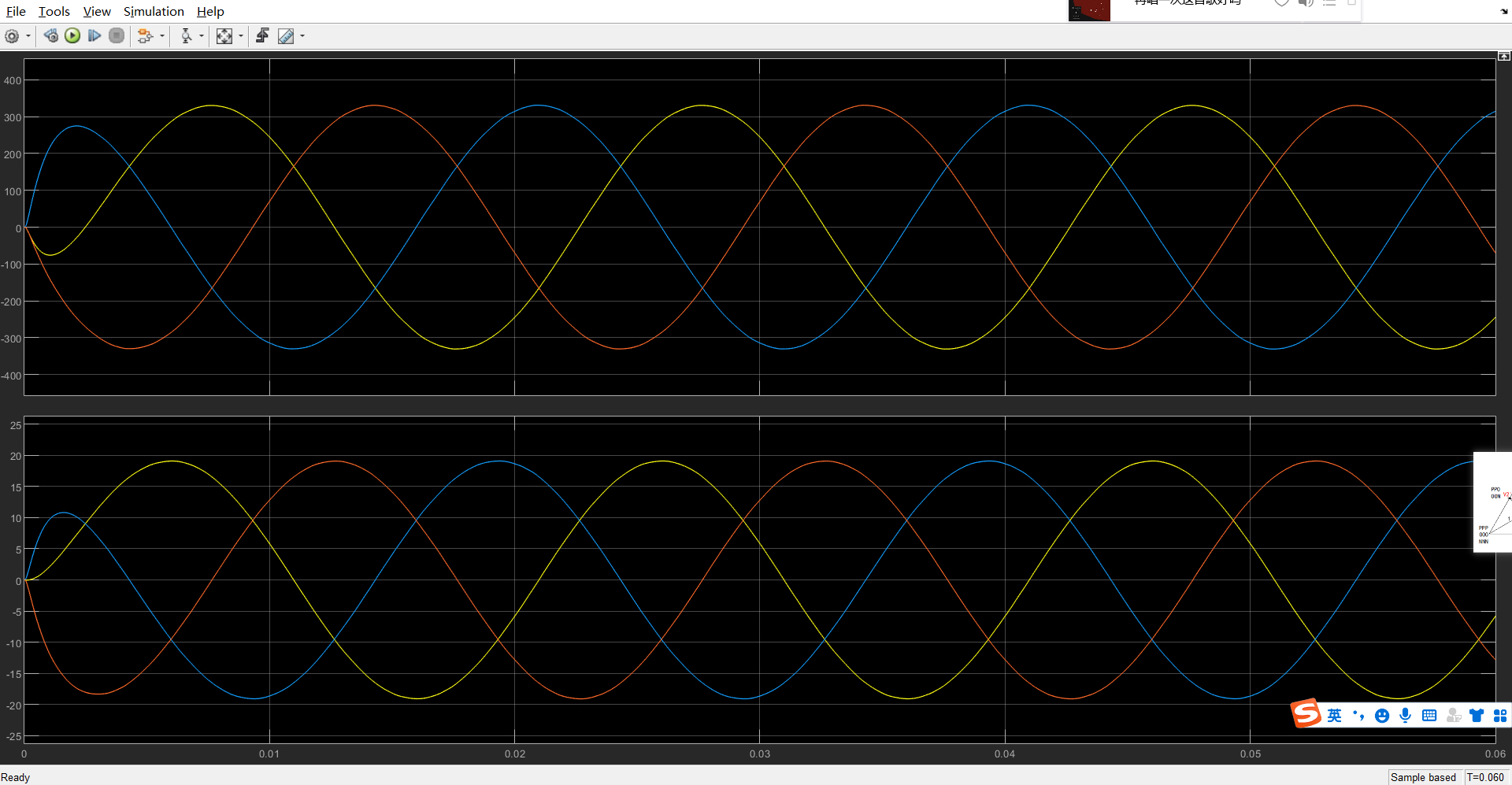
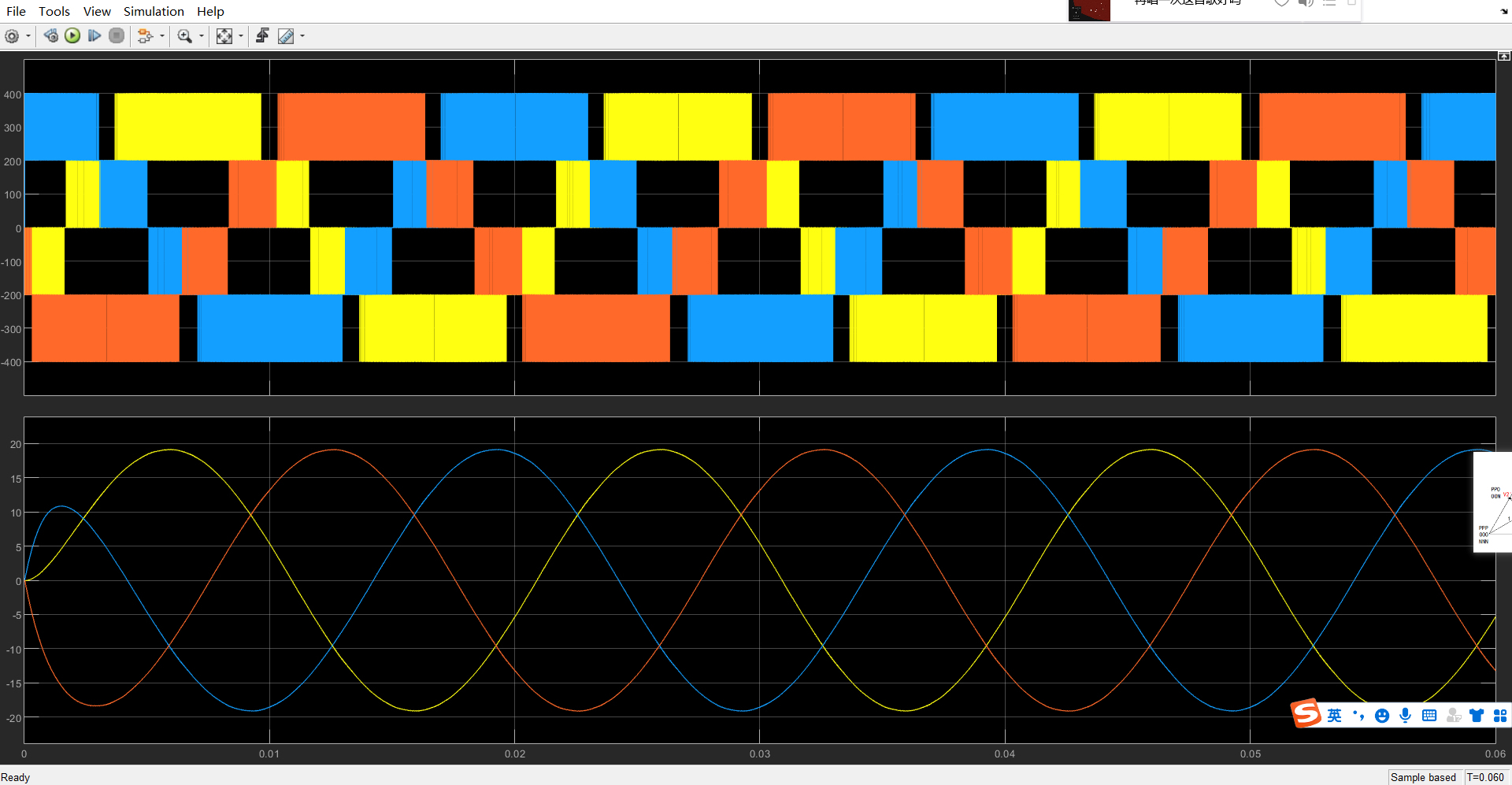
在仿真模型搭建过程中,需要合理设置各个模块的参数,包括开关频率、直流侧电压、负载参数等等。通过运行仿真,可以得到不同情况下的输出波形,正如下面图片所示(此处假设图片展示了不同控制策略、不同坐标系下的输出电压、电流波形等)。
在60度坐标系下,波形呈现出特定的规律,其与90度坐标系下的波形又有所不同。这些差异反映了不同坐标系对逆变器输出特性的影响,在实际应用中,可以根据具体需求选择合适的坐标系。
总之,通过MATLAB Simulink搭建三电平T型逆变器仿真模型,并采用上述控制策略,我们能够深入研究其在不同情况下的运行特性,为实际工程应用提供有力的理论支持和实践指导。