直流电机速度单闭环控制系统(电机为传递函数建模) matlab/simulink 仿真模型+设计报告
在控制系统领域,直流电机的速度控制是一个经典且重要的课题。今天咱们就来讲讲基于传递函数建模的直流电机速度单闭环控制系统,并用 Matlab/Simulink 来搭建仿真模型,顺便分享下设计报告的思路。
直流电机传递函数建模基础
直流电机的动态特性可以用传递函数来描述。简单来说,直流电机的运动方程涉及到电机的电磁转矩、转动惯量、粘性摩擦系数等参数。一般情况下,直流电机的传递函数可以表示为:
直流电机速度单闭环控制系统(电机为传递函数建模) matlab/simulink 仿真模型+设计报告
\ G(s)=\\frac{\\omega(s)}{V*a(s)}=\\frac{K*m}{Js + B} \\
其中,\(\omega(s)\) 是电机的角速度(输出),\(Va(s)\) 是电机电枢电压(输入),\(Km\) 是电机的转矩常数,\(J\) 是转动惯量,\(B\) 是粘性摩擦系数。
Matlab/Simulink 仿真模型搭建
打开 Matlab,进入 Simulink 界面。下面逐步来搭建这个仿真模型。
- 创建新模型:点击 "新建模型" 按钮,新建一个空白的 Simulink 模型文件。
- 添加模块 :
- 输入模块 :从 "Sources" 库中拖入 "Step" 模块,这个模块用于提供一个阶跃输入信号,模拟电机启动时给定的速度指令。
- 传递函数模块:在 "Continuous" 库中找到 "Transfer Fcn" 模块,将其拖入模型窗口。双击该模块,在弹出的对话框中设置分子为 \(K_m\),分母为 \(J, B\),这就对应了前面提到的直流电机传递函数。
- 反馈环节:需要添加一个反馈结构来实现闭环控制。从 "Math Operations" 库中拖入 "Sum" 模块,默认是减法运算(符号为 "+ -"),用于计算速度指令与实际速度的误差。再从 "Sinks" 库中拖入 "Scope" 模块,用于观察电机速度随时间的变化曲线。
- 连接模块:用信号线将各个模块按如下方式连接起来:"Step" 模块的输出连接到 "Sum" 模块的第一个输入端口;"Transfer Fcn" 模块的输出连接到 "Sum" 模块的第二个输入端口,同时也连接到 "Scope" 模块的输入端口。"Sum" 模块的输出连接到 "Transfer Fcn" 模块的输入端口。
下面是一个简单的 Matlab 脚本示例,用于定义传递函数中的参数并运行仿真:
matlab
% 定义参数
Km = 0.1; % 转矩常数
J = 0.01; % 转动惯量
B = 0.001; % 粘性摩擦系数
% 创建传递函数
num = [Km];
den = [J, B];
sys = tf(num, den);
% 定义仿真时间
tspan = 0:0.01:10;
% 阶跃响应仿真
[y, t] = step(sys, tspan);
% 绘制响应曲线
figure;
plot(t, y);
xlabel('时间 (s)');
ylabel('电机速度 (rad/s)');
title('直流电机速度单闭环系统阶跃响应');在这段代码中,首先定义了传递函数中的参数 \(K_m\)、\(J\) 和 \(B\)。然后使用 tf 函数创建了传递函数对象 sys。接着定义了仿真时间范围 tspan,通过 step 函数对系统进行阶跃响应仿真,得到响应输出 y 和对应的时间 t。最后使用 plot 函数绘制出电机速度随时间变化的曲线。
设计报告要点
- 系统概述:阐述直流电机速度单闭环控制系统的基本原理,包括传递函数建模的依据,以及闭环控制如何实现对电机速度的精确调节。
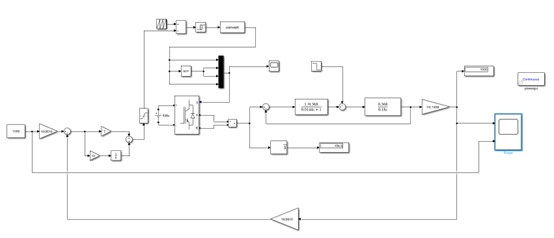
- 模型搭建:详细描述在 Simulink 中搭建仿真模型的步骤,像前面讲的每个模块的来源、参数设置以及连接方式,最好配上模型截图,这样更直观。
- 参数分析 :讨论传递函数中各个参数(\(Km\)、\(J\)、\(B\))对系统性能的影响。比如 \(Km\) 增大可能使电机响应速度变快,但也可能导致系统不稳定;\(J\) 和 \(B\) 的变化会如何影响电机的动态和稳态性能等。
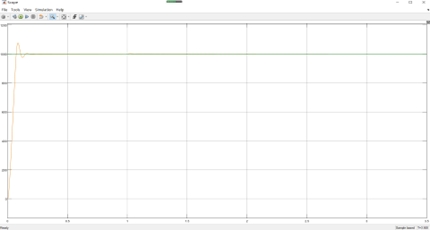
- 仿真结果分析:展示并分析 "Scope" 模块中得到的速度响应曲线。讨论系统的上升时间、调节时间、超调量等性能指标,解释这些指标与理论分析的一致性或差异原因。
- 结论与展望:总结本次设计实现的直流电机速度单闭环控制系统的优点和不足,提出可能的改进方向,比如引入更复杂的控制算法(如 PID 控制进一步优化性能),或者考虑更多实际因素对模型进行完善。
通过以上步骤,我们完成了基于 Matlab/Simulink 的直流电机速度单闭环控制系统的仿真模型搭建以及设计报告的主要框架。希望对正在研究这方面的小伙伴有所帮助,一起探索控制系统的奇妙世界!