惯性动作捕捉设备,是依托惯性传感器技术精准捕捉人体动作姿态、轨迹及运动幅度的核心设备,其核心优势在于摆脱了传统光学动捕对场地、环境的严苛限制,可在任意场景下实现全身动作数据的实时采集与传输。这些采集到的高精度人体动作数据即可以用于轻量级的影视动画制作,也可以用于作为人体示范数据用于机器人的训练,结合数字人实时渲染技术,这些数据还可以实时映射在虚拟人身上实现虚拟人的实时驱动,广泛应用于直播间虚拟主播、线下活动虚拟主持人的跨次元互动场景中
在惯性动捕领域,=凭借多年深耕经验,成为行业技术领先企业。公司立足市场需求持续迭代升级,自主研发的全身惯性动捕设备,融合了高精度传感器校准技术、低延迟数据传输算法,在保持核心性能(高精度、低延迟)的同时,打破了同类设备"高成本"的行业痛点,具备极高的性价比优势。凭借成熟的技术方案与全流程服务能力,该设备已在虚拟交互、机器人训练、动画制作等多个领域落地应用,积累了丰富的实战案例。
01 虚拟人直播/主持方案
惯性动捕设备与数字人实时渲染软件的深度集成,构建了"真人驱动+虚拟呈现"的同步交互方案,彻底打破了虚拟人与现实场景的壁垒,为直播、活动主持等场景注入了全新活力。
在2024年的中国默克健康年会上,虚拟动力作为技术协作单位,提供了全套的惯性动捕设备、数字人实时驱动软件,以及全流程的技术操作与人员支持,在会议上,虚拟人流畅自然的动作、贴合场景的姿态呈现,为现场观众打造了沉浸式跨次元体验,也验证了惯性动捕技术在高端商业活动中的稳定性与可靠性。
02 机器人实时遥操方案
在机器人遥操领域,惯性动捕设备成为了连接真人动作与机器人执行的核心枢纽,为机器人实时遥操提供了精准的动作支撑。在身外化身实时遥操系统中,动作捕捉设备更是链接真人动作与机器人动作的关键。目前可用于真机数据的采集,随着惯性动捕技术与机器人技术的深度融合,该方案有望在高危作业、远程运维、特种作业等场景实现突破。

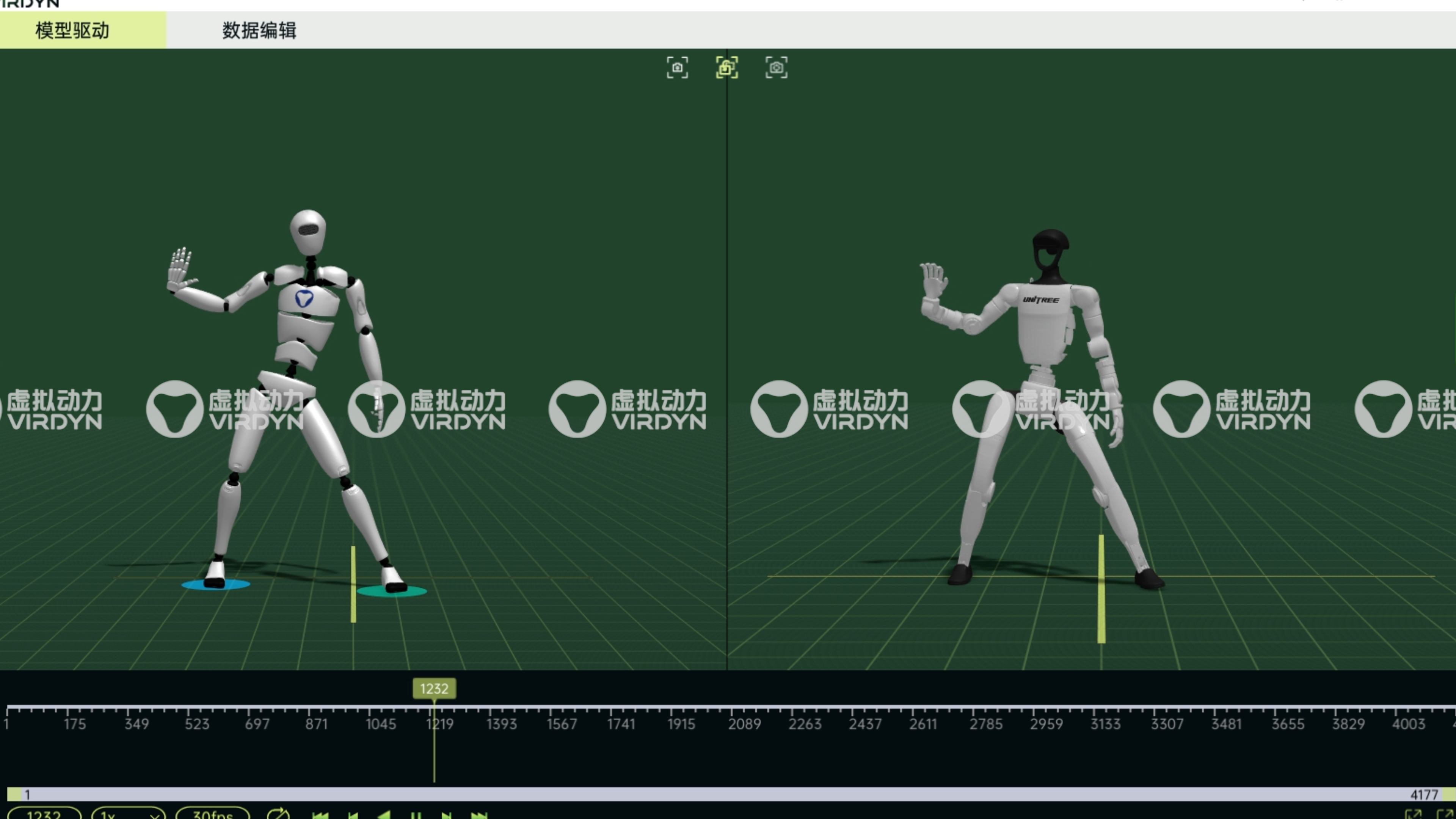
03 机器人训练数据采集
与机器人实时遥操方案的"即时映射"不同,惯性动捕设备在机器人训练数据采集领域的应用,核心在于为智能机器人模型提供高质量、标准化的人体动作数据集,助力模型快速迭代。
这些标准化动作数据还可作为机器人强化学习的初始策略,替代传统"从零开始的随机验证"模式,大幅缩短模型训练周期,提升训练效率与精度
未来,随着传感器技术、算法模型、数据处理能力的持续升级,惯性动捕设备将实现更细微动作的捕捉、更低延迟的数据传输、更广泛的场景适配,进一步渗透至影视创作、VR/AR、医疗康复、工业制造等更多领域,成为连接现实动作与数字世界、推动产业智能化升级的重要纽带,持续创造新的行业价值与应用可能。