光伏储能系统仿真模型,Matlab,simulink,PID控制,模型预测控制对比。 仅限学习交流使用,Simulink-01
嘿,小伙伴们!今天咱们来唠唠光伏储能系统仿真模型,特别是在 Matlab 的 Simulink 环境里,PID 控制和模型预测控制(MPC)的对比。这俩控制策略在光伏储能系统里那可都是响当当的角色,各有各的神通。
光伏储能系统为啥重要
随着可再生能源越来越火,光伏作为主力军之一,那发展势头相当猛。但光伏输出受天气影响大呀,不稳定,这时候储能系统就来救场啦,它能把多余的电能存起来,需要的时候再放出来,保证供电稳定。而控制策略就是这整个系统的"大脑",决定着系统怎么高效运行。
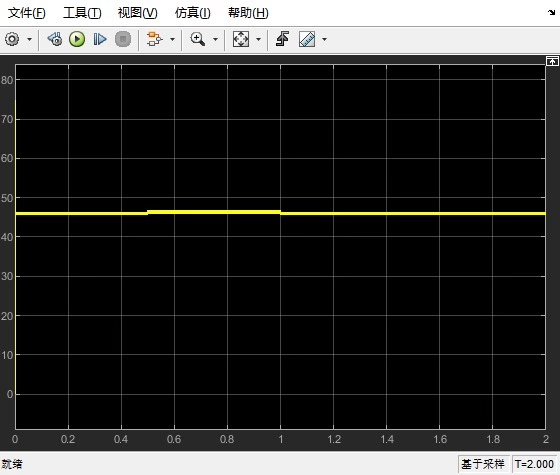
Matlab Simulink 搭建光伏储能系统模型
在 Simulink 里搭建光伏储能系统模型还是挺方便的。就拿光伏板模型来说,我们可以用 Simscape 里的相关模块来模拟。比如说,下面这段简单的代码(在 Matlab 脚本里)可以设置光伏板的一些参数:
matlab
% 设置光伏板参数
pv_params.Voc = 37.5; % 开路电压
pv_params.Isc = 8.5; % 短路电流
pv_params.Ns = 72; % 串联电池片数
pv_params.Np = 1; % 并联电池串数这里通过定义这些参数,就能很好地模拟出光伏板的特性。然后把这个参数导入到 Simulink 里对应的光伏板模块,就能让它按照我们设定的特性工作啦。
储能系统也类似,像锂电池模块,我们可以设置它的容量、内阻等参数,来模拟真实的充放电过程。
PID 控制在光伏储能系统中的应用
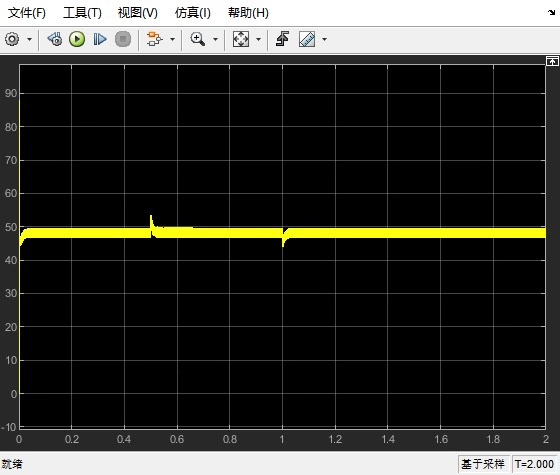
PID 控制那可是经典中的经典,简单又好用。在光伏储能系统里,它主要用来调节输出电压或者电流,让系统稳定运行。
看看这个简单的 PID 控制代码示例(假设是在 S - Function 里实现的电压控制):
matlab
function [sys,x0,str,ts] = pid_control(t,x,u,flag,Kp,Ki,Kd)
persistent integral
switch flag,
case 0,
[sys,x0,str,ts]=mdlInitializeSizes;
case 1,
sys=mdlDerivatives(t,x,u);
case 2,
sys=mdlUpdate(t,x,u);
case 3,
sys=mdlOutputs(t,x,u,Kp,Ki,Kd,integral);
case 4,
sys=mdlGetTimeOfNextVarHit(t,x,u);
case 9,
sys=mdlTerminate(t,x,u);
otherwise
DAStudio.error('Simulink:blocks:unhandledFlag', num2str(flag));
end
end
function [sys,x0,str,ts]=mdlInitializeSizes
sizes = simsizes;
sizes.NumContStates = 0;
sizes.NumDiscStates = 0;
sizes.NumOutputs = 1;
sizes.NumInputs = 2;
sizes.DirFeedthrough = 1;
sizes.NumSampleTimes = 1;
sys = simsizes(sizes);
x0 = [];
str = [];
ts = [0 0];
end
function sys=mdlOutputs(t,x,u,Kp,Ki,Kd,integral)
error = u(1)-u(2); % 计算误差,u(1)是目标电压,u(2)是当前电压
integral = integral + error*0.01; % 积分项,0.01是采样时间
derivative = (error - last_error)/0.01; % 微分项
control_signal = Kp*error + Ki*integral + Kd*derivative; % PID 控制输出
sys(1) = control_signal;
end在这段代码里,通过计算目标电压和当前电压的误差,然后利用比例(Kp)、积分(Ki)、微分(Kd)三个环节来调整输出的控制信号,让实际电压尽可能接近目标电压。PID 控制的优点就是结构简单,参数调整相对容易,在很多场景下都能快速让系统稳定下来。
模型预测控制(MPC)闪亮登场
模型预测控制就相对高级一些啦。它是基于系统的模型,预测未来一段时间内系统的输出,然后通过优化算法找到最优的控制输入。
光伏储能系统仿真模型,Matlab,simulink,PID控制,模型预测控制对比。 仅限学习交流使用,Simulink-01
在光伏储能系统里,MPC 可以同时考虑光伏输出的不确定性、储能系统的充放电限制等因素,实现更智能的控制。比如说,下面是一个简化的 MPC 预测模型代码片段:
matlab
% 系统模型 A、B 矩阵假设
A = [1 0.01;0 1];
B = [0.01;0.1];
% 预测时域
Np = 10;
% 控制时域
Nu = 5;
% 权重矩阵
Q = eye(Np);
R = eye(Nu);
% 当前状态
x = [0;0];
% 目标值
y_ref = 1;
for k = 1:100
% 预测未来输出
Y = zeros(Np,1);
U = zeros(Nu,1);
for i = 1:Np
if i <= Nu
Y(i) = A(1,1)*x(1) + A(1,2)*x(2) + B(1)*U(i);
else
Y(i) = A(1,1)*Y(i - 1) + A(1,2)*x(2);
end
end
% 优化求解控制输入
cost = (Y - y_ref*ones(Np,1))'*Q*(Y - y_ref*ones(Np,1)) + U'*R*U;
[U_opt,fval] = fmincon(@(u)mpc_cost(u,x,A,B,y_ref,Np,Nu,Q,R),U,[],[],[],[],-10*ones(Nu,1),10*ones(Nu,1));
% 应用第一个控制输入
x = A*x + B*U_opt(1);
end
function cost = mpc_cost(u,x,A,B,y_ref,Np,Nu,Q,R)
Y = zeros(Np,1);
for i = 1:Np
if i <= Nu
Y(i) = A(1,1)*x(1) + A(1,2)*x(2) + B(1)*u(i);
else
Y(i) = A(1,1)*Y(i - 1) + A(1,2)*x(2);
end
end
cost = (Y - y_ref*ones(Np,1))'*Q*(Y - y_ref*ones(Np,1)) + u'*R*u;
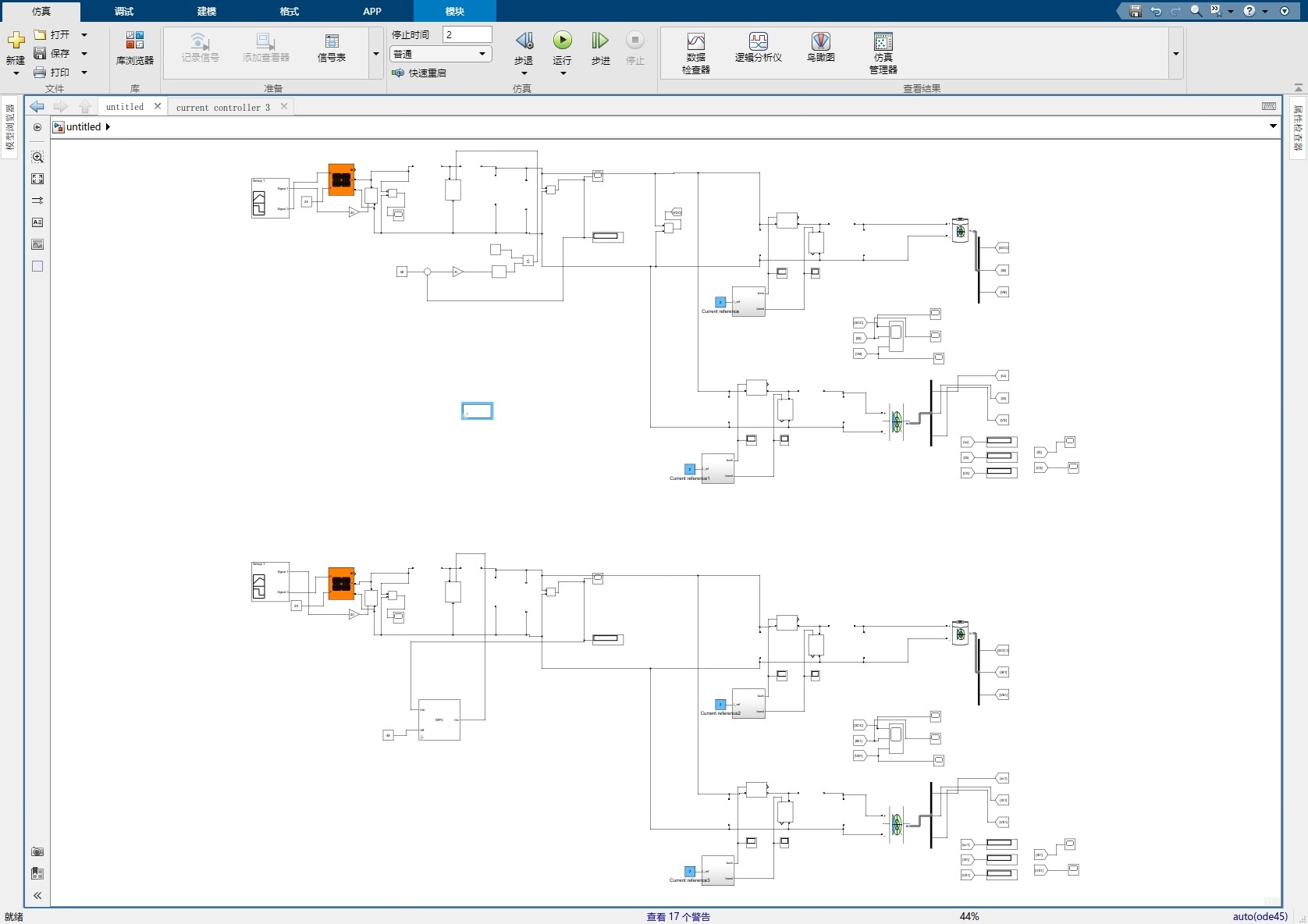
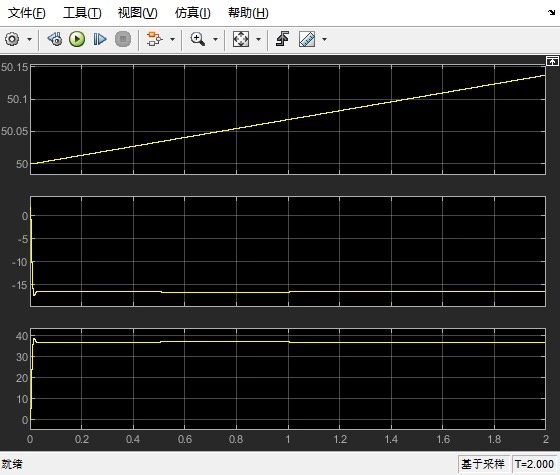
end这段代码里,通过系统的 A、B 矩阵来预测未来输出,然后定义一个代价函数(cost function),通过优化算法(这里用 fmincon)找到最优的控制输入,让系统输出尽可能接近目标值,同时满足各种约束条件。
PID 控制与 MPC 的对比
- 性能方面
- PID 控制 :响应速度相对较快,能快速对误差做出反应,让系统稳定。但在处理复杂、具有不确定性的系统时,可能就有点力不从心了,比如光伏输出突然因为云层变化大幅波动,PID 可能很难迅速调整到最佳状态。
- MPC:它能考虑系统的未来变化,在处理复杂约束和不确定性方面表现出色。可以提前规划控制输入,让系统更平滑地运行。不过,它的计算量较大,对硬件性能要求高一些。
- 参数调整难度
- PID 控制 :参数 Kp、Ki、Kd 的调整有一些经验法则,相对容易上手。通过不断试错和一些简单的方法,比如 Ziegler - Nichols 法,就能找到比较合适的参数。
- MPC:参数设置涉及到预测时域、控制时域、权重矩阵等,这些参数的物理意义没有 PID 参数那么直观,调整起来需要对系统有更深入的理解和更多的调试经验。
总的来说,PID 控制像个踏实的老工匠,简单可靠,在很多常规场景下都能出色完成任务;而 MPC 就像个聪明的年轻工程师,能应对复杂多变的情况,但需要更多的"调教"。在实际的光伏储能系统中,到底选谁,还得根据具体的应用场景和需求来定。
好啦,今天关于光伏储能系统仿真模型里 PID 控制和 MPC 的对比就聊到这儿。希望对大家学习和研究这块内容有所帮助,仅限学习交流使用哦!咱们下次再唠点别的有趣的技术话题。
#Simulink - 01 #光伏储能系统 #PID控制 #模型预测控制 #Matlab