Matlab仿真:转速闭环转差频率控制异步电动机的矢量控制(付设计说明) 2021b及以上版本
指尖划过键盘的瞬间,电机控制工程师的日常开始了。今天咱们来点硬核的------用Matlab 2021b整一个带转速闭环的异步电机矢量控制仿真。别被"矢量控制"这个词吓到,说白了就是让电机像听话的猎犬一样精准控制转速和转矩。
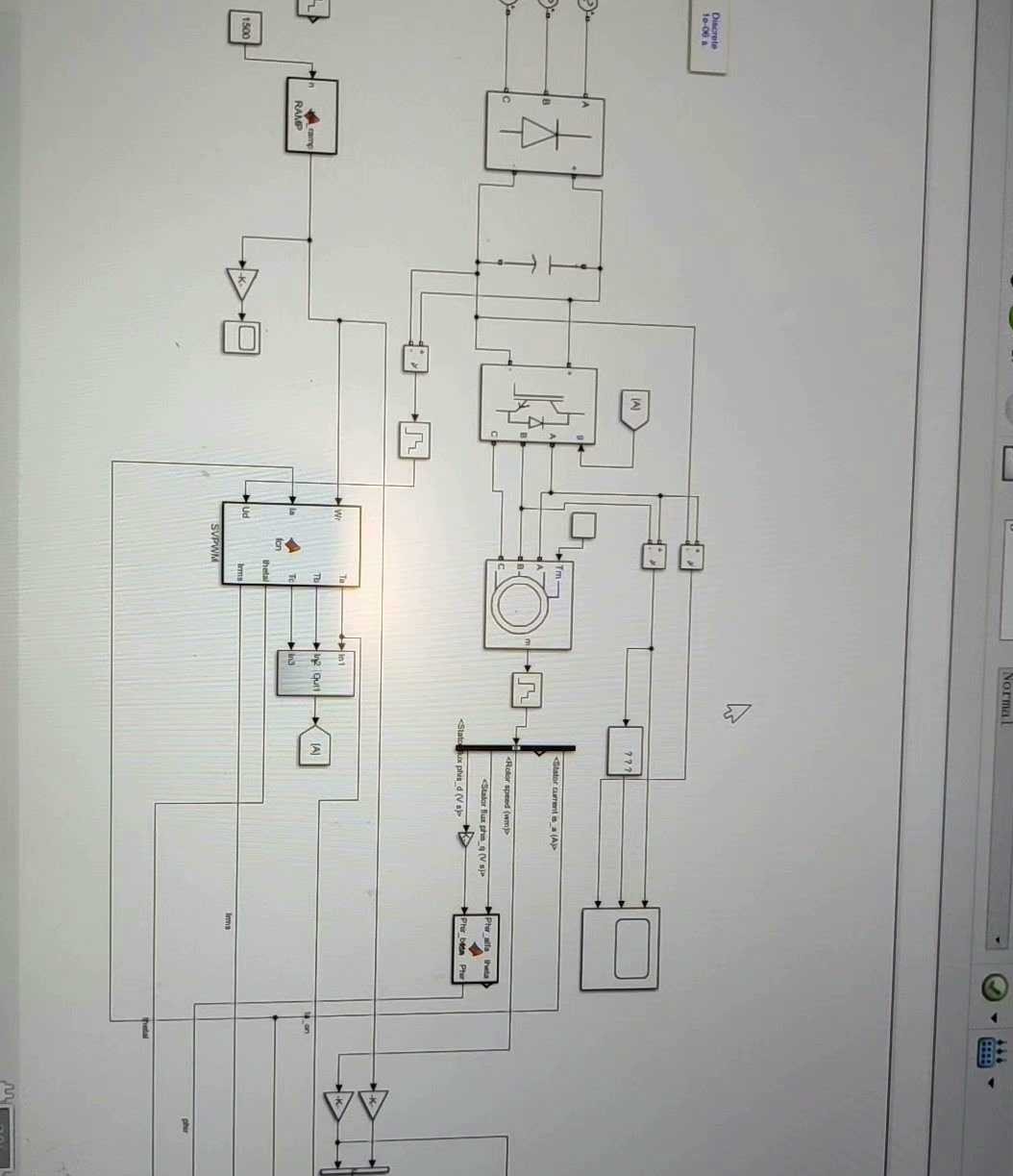
先打开Simulink拉个基础框架。新版Matlab的异步电机模块藏在Simscape/Electrical里,记得把参数设置里的"Advanced"选项卡勾上,这里藏着磁链观测器的关键设置。老版本容易在这里踩坑,2021b之后的界面倒是直观多了。
坐标变换是绕不过去的坎儿,直接上代码:
matlab
% 静止坐标系转同步旋转坐标系
function [id,iq] = clarke_park(ia, ib, theta)
alpha = ia;
beta = (ia + 2*ib)/sqrt(3);
id = alpha.*cos(theta) + beta.*sin(theta);
iq = -alpha.*sin(theta) + beta.*cos(theta);
end这坨代码看着简单,实际调试时相位补偿容易出幺蛾子。上周有个兄弟因为少乘了个π/180,电机直接跳起迪斯科。记得用Scope同时监控原始信号和变换后信号,波形相位差超过5度就得查这个变换模块。

Matlab仿真:转速闭环转差频率控制异步电动机的矢量控制(付设计说明) 2021b及以上版本
转速环设计才是重头戏。转差频率计算得用这个公式:
matlab
slip_freq = (Kp_speed + Ki_speed/s)*(omega_ref - omega_actual);参数整定有讲究,Kp别超过0.5,Ki控制在5-10之间。遇到过调就加个速率限制器,别让转差频率变化比女朋友变脸还快。
磁链环往往被忽视,但其实它决定了系统的刚度。分享个调试技巧:把磁链给定值从0.8Wb慢慢往上调,观察电流波形。当THD突然增大时,说明磁链饱和了,这时候的0.75倍就是最佳工作点。
最后上主电路的时候,PWM频率别低于5kHz。新版Simulink有个好用的IGBT模块,比老版本那堆分立元件省事得多。记得在直流母线并个1kΩ的虚拟电阻,不然仿真容易数值震荡。
当看到转速曲线稳稳咬住设定值,转矩响应在0.1秒内到位时,那种爽快感就像调试通宵后终于找到bug的瞬间。矢量控制这玩意儿,玩明白了其实和骑自行车一个道理------平衡好转速和磁链,剩下的交给坐标变换去协调吧。