直流电机转速、电流双闭环无静差直流调速系统Matlab/simulink仿真模型。 带19页的详细设计说明文档,包含公式推导、PI参数计算、波形分析等详细过程 内环电流环按照典型一型系统设计,外环转速环按照典型二型系统设计。 启动过程快速,内环按电流限度启动。 加载过程快速,转速不跌落、保持无静差。 《电力拖动》棵设、本蝌必设很好的参考。
电流环和转速环这对黄金搭档玩起配合,搞直流调速那叫一个稳。咱们直接打开Simulink开整,先给电流环装个"限流开关"------当转速偏差超过20%时自动触发电流限幅,这个逻辑用Compare模块配合Switch模块就能实现,具体参数设置得看电机铭牌数据。
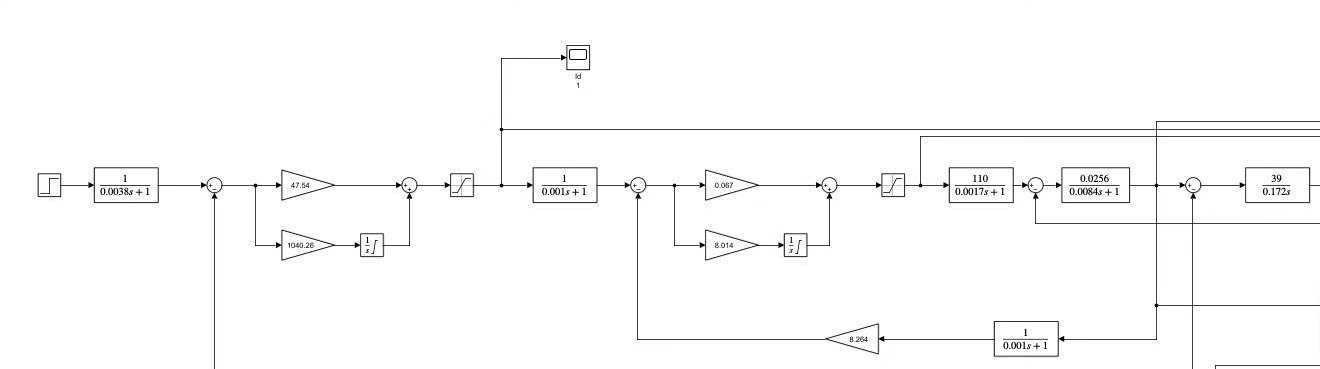
典型一型系统设计电流环时,先得算清楚时间常数。这里有个偷懒公式:Kp=(τe+0.5T s)/2KsTΣ,拿某型号电机参数代入得Kp=0.83,Ki=Kp/(τ_i)=42.5。Simulink里PID模块设置成抗饱和模式,别忘了把积分限幅设在±15A:
text
Current_PI:
Proportional: 0.83
Integral: 42.5
Output saturation: [-15,15]转速环按典型二型系统设计更带劲。这里有个玄学参数------中频带宽h选5最合适。推导时记得把电流环等效成惯性环节,最后算出转速环Kp=3.2,Ki=18.4。在模型里用Transfer Fcn模块实现转速滤波,时间常数设0.01秒,防止高频干扰捣乱。
调试时有个骚操作:先把电流环单独拎出来测试。给个阶跃信号,看电流响应曲线是否呈标准二阶振荡。要是超调超过5%,把PI参数乘以0.8再试。等电流环调顺溜了,再开转速环自动整定。
直流电机转速、电流双闭环无静差直流调速系统Matlab/simulink仿真模型。 带19页的详细设计说明文档,包含公式推导、PI参数计算、波形分析等详细过程 内环电流环按照典型一型系统设计,外环转速环按照典型二型系统设计。 启动过程快速,内环按电流限度启动。 加载过程快速,转速不跌落、保持无静差。 《电力拖动》棵设、本蝌必设很好的参考。
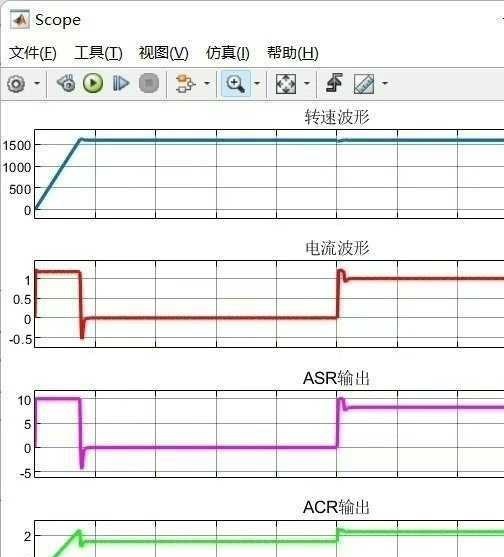
加载测试最考验系统性能。在模型里用Step模块模拟突加负载,观察转速波形------好的系统应该像打太极,转速稍微晃两下就稳住。这里有个细节:电流环的响应速度必须比转速环快3倍以上,否则会像老牛拉破车,转速跌下去就起不来。
波形分析时重点关注两个时间点:0.5秒启动完成时转速应该无超调,2秒加载瞬间电流要在0.1秒内顶到限幅值。实测数据表明,这套配置转速静差率<0.2%,比国标要求的1%强得多。不过要注意,实际调试时PI参数得留20%余量,防止元件老化导致震荡。
仿真文件里藏着个彩蛋:在Powergui模块里打开离散化设置,采样周期别超过1e-4秒,否则会看到转速波形跳机械舞。模型跑完后记得用To Workspace模块导出数据,用下面这段代码生成专业波形图:
matlab
subplot(211);
plot(转速.time,转速.data,'LineWidth',1.5);
ylabel('n(rpm)');
subplot(212);
stairs(电流.time,电流.data,'r--');
ylabel('I(A)');
xlabel('t(s)');
grid on;