基于SUMO实现备选路径推荐以及实时动态道路信息获取,这个小车每到一个路口、就返回这个路口的信号灯状态、并输出基于当前所在路段-重点路段的前三个最短备选路径 小车每到达一个路口,返回与当前路口连接路段的拥堵情况,控制小车进行动态规划,每到达一个路口用算法进行一次路径规划,直到到达终点,其实就是备选路径推荐,就是给定两个node_id,返回最短的3条路径,我要在小车运行时,每走一步,到达路口时,返回当前路口的红绿灯信息,以及备选路径 我反正要的是两点之间备选路径
基于SUMO的智能路径推荐与实时交通信息感知系统功能说明
该系统是一套基于SUMO(Simulation of Urban Mobility)平台开发的智能交通仿真原型,核心聚焦于车辆行驶过程中的动态路径规划与实时交通信息采集,尤其实现了车辆途经路口时的信号灯状态感知功能。系统整体功能可分为环境构建、路网建模、路径规划、仿真控制及信息交互五大模块,具体说明如下:
一、环境配置与初始化模块
- SUMO环境校验 :自动检测系统环境变量中
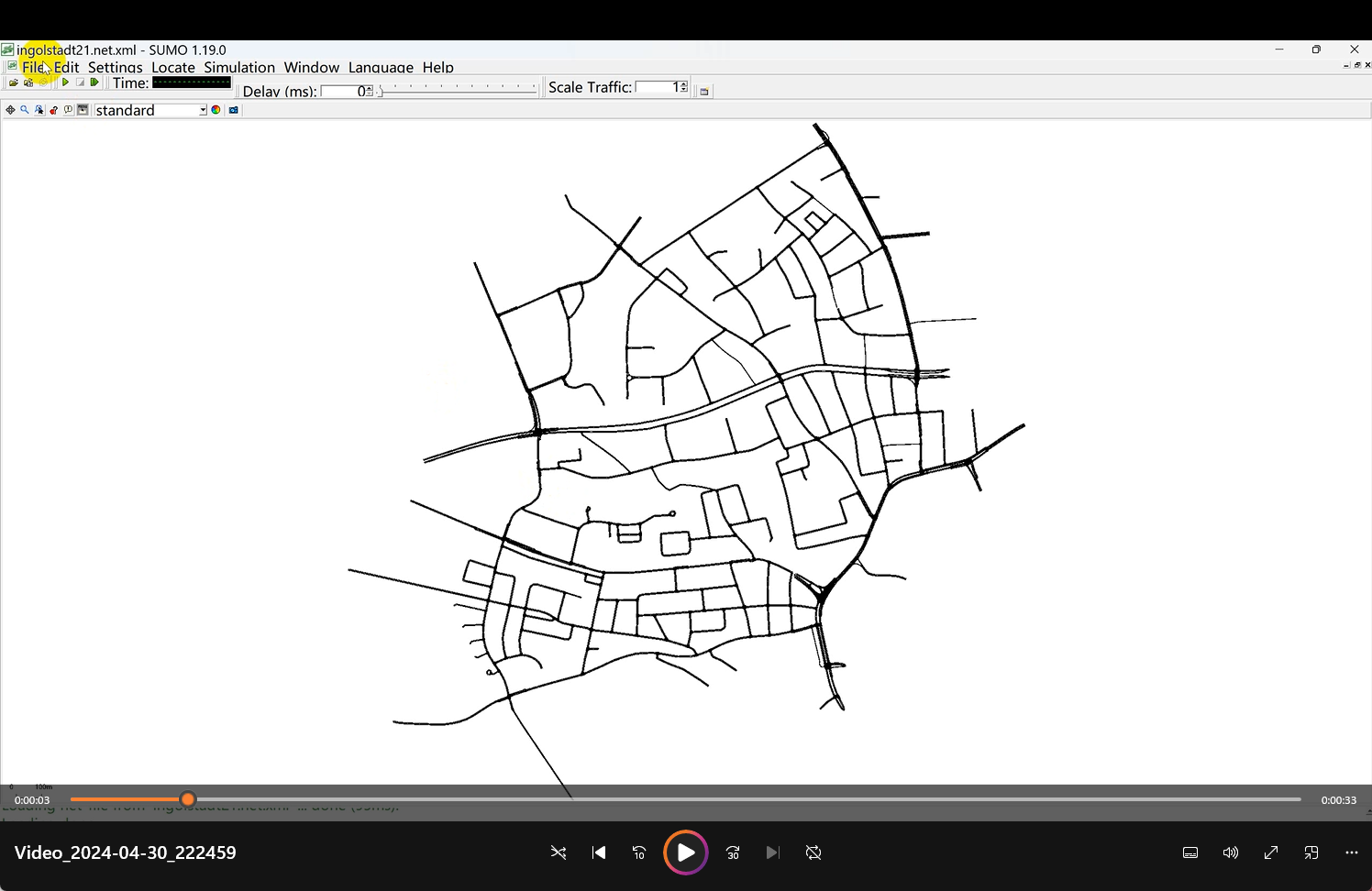
SUMO_HOME的配置,确保SUMO仿真引擎及相关工具(如traci接口)可正常调用,为仿真运行提供基础环境支持。 - 仿真文件加载 :加载预设的路网文件(
ingolstadt21.net.xml)和车辆路线文件(ingolstadt21.rou.xml),构建仿真场景的静态基础数据(包括道路拓扑、车道属性、路口分布等)。 - 可视化配置:预配置Matplotlib绘图环境,确保中文显示正常,为后续路径可视化提供支持。
二、路网建模与管理模块
- 路网图结构化 :通过
save_network()函数将SUMO路网数据转换为有向图模型(基于NetworkX库),图中节点对应道路交叉口,边对应路段,边的权重基于路段长度和最大限速计算(权重值为理论通行时间),实现路网的数学抽象。 - 图数据持久化 :支持将构建的路网图序列化存储为
networkroute.pkl**文件,后续可通过loadnetwork()函数快速加载,避免重复建模,提升系统启动效率。
三、动态路径规划模块
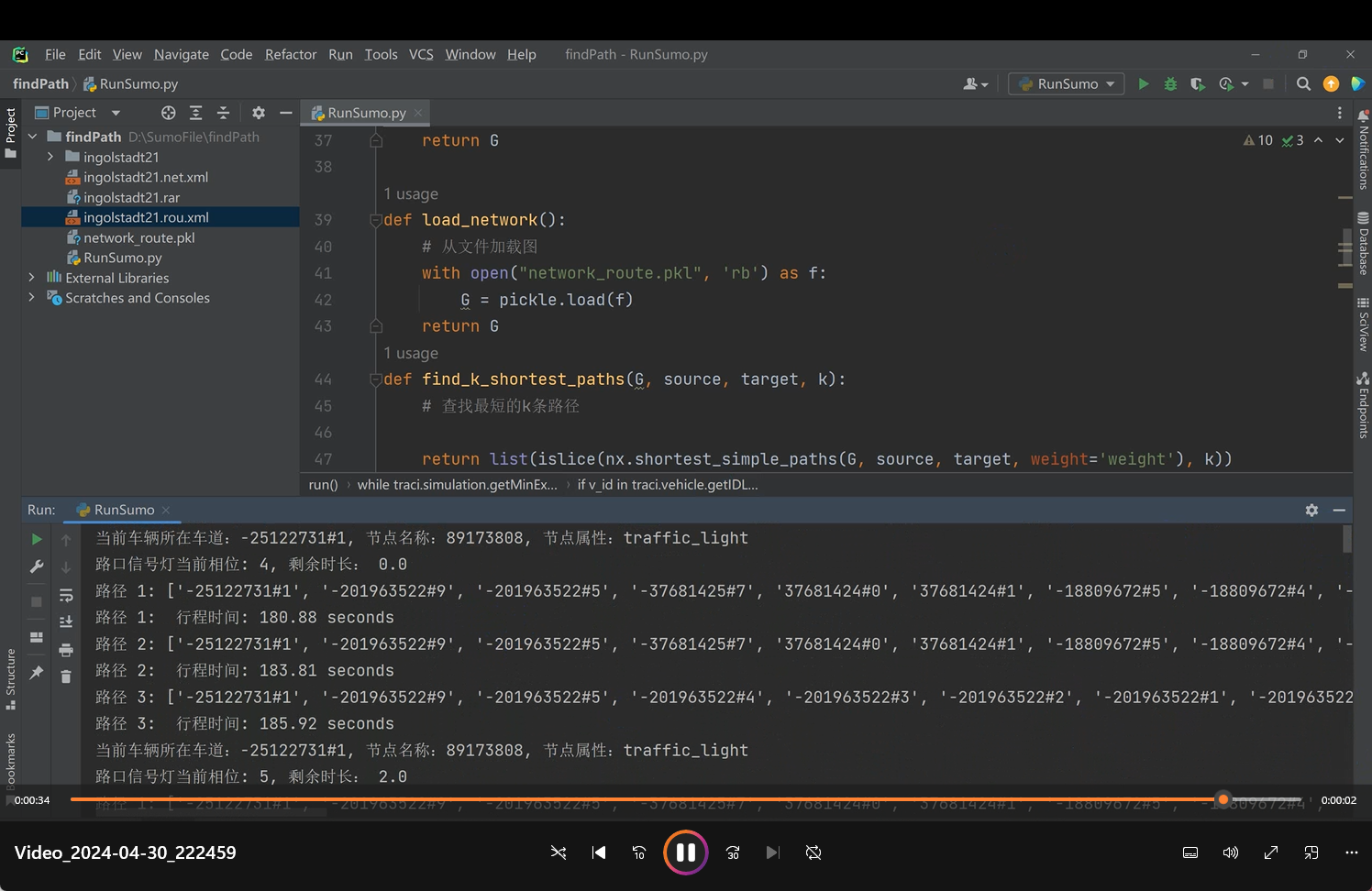
- k短路计算 :实现
findkshortest_paths()函数,基于Dijkstra算法的扩展方法,从起点到终点搜索前k条(默认k=3)最短路径,为车辆提供多备选路线方案。 - 路径成本评估 :通过
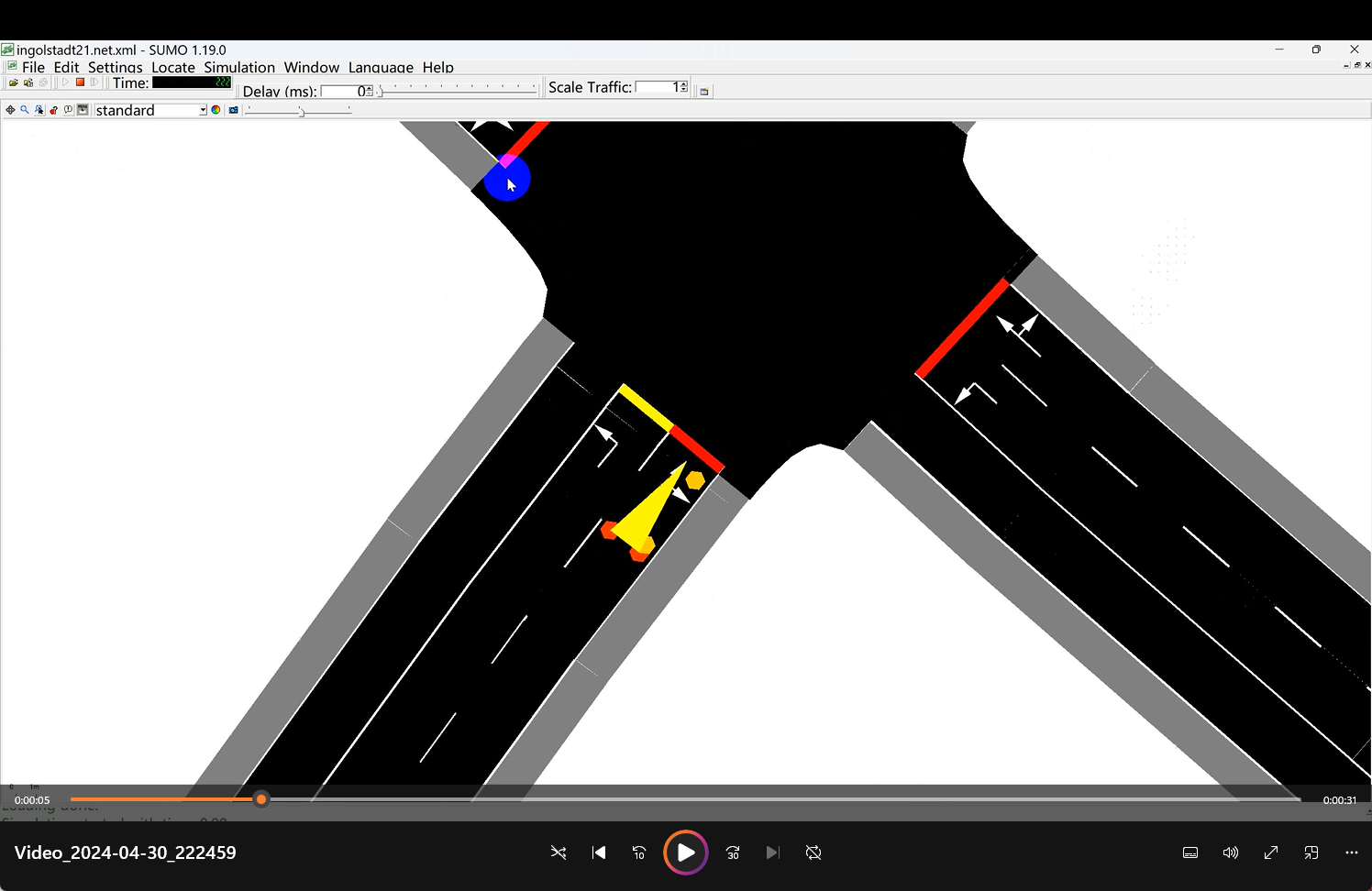
calculatepathtravel_time()函数计算每条备选路径的总通行时间(基于图中边的权重累加),为路径选择提供量化依据。 - 路径可视化:在SUMO仿真界面中,通过红色填充多边形动态标记推荐的最短路径,直观展示路径走向,便于观察与分析。
四、仿真运行控制模块
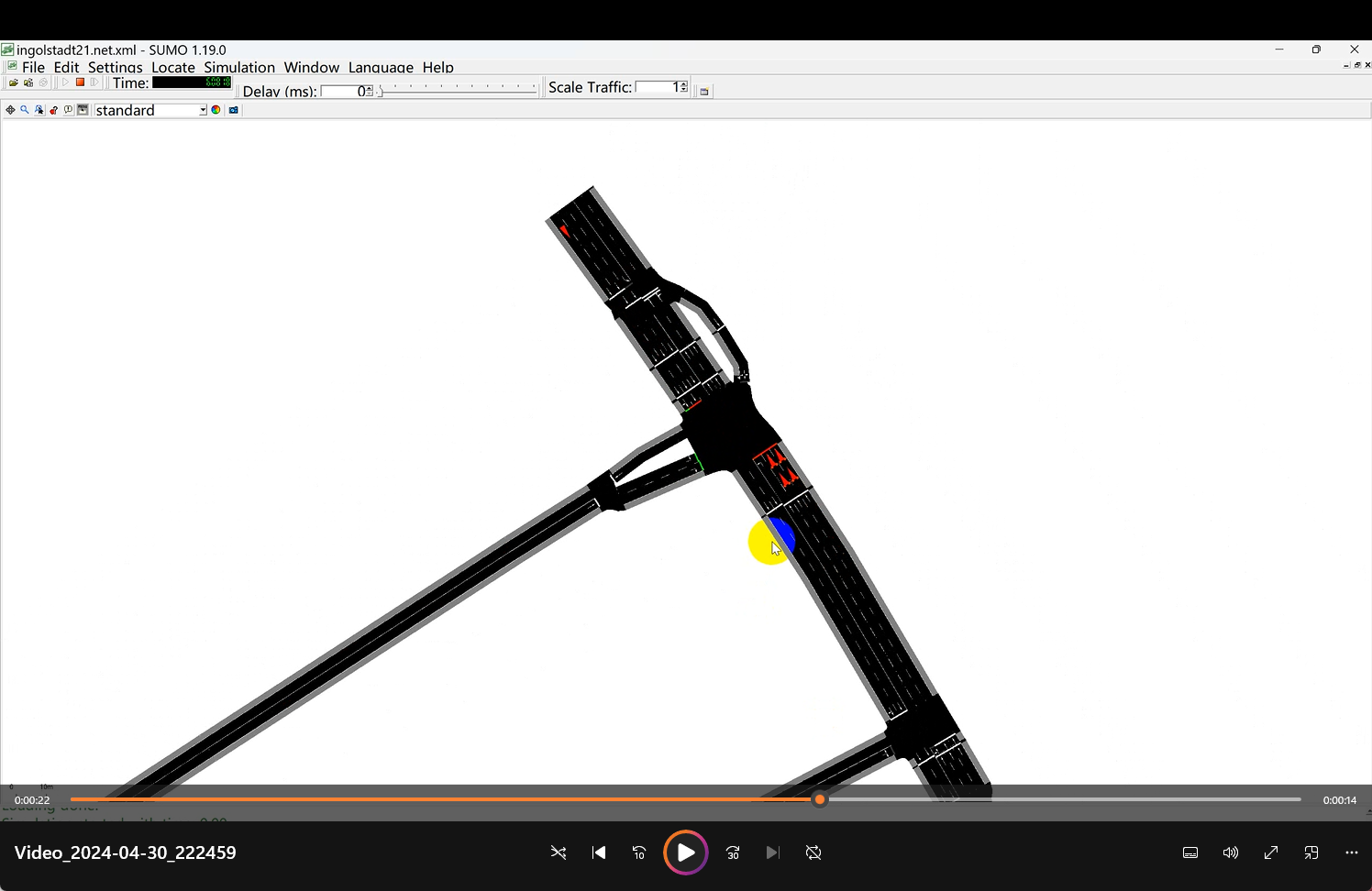
- 仿真环境启动:初始化SUMO仿真实例,支持带GUI的交互模式,可实时观察车辆行驶状态、道路及路口动态。
- 车辆行驶管理 :创建虚拟测试车辆,根据预设起点(
startedge*)和终点(end*edge)规划初始行驶路线,并通过traci接口控制车辆在仿真环境中按步骤行驶。 - 仿真循环控制:按时间步长(默认1秒)推进仿真过程,实时捕获仿真时间、车辆位置、所在路段等动态信息,确保车辆行驶状态与路网交互的实时性。
五、实时交通信息感知模块
- 路口状态监测:实时追踪车辆位置,当车辆到达设有交通信号灯的路口时,触发信息采集机制。
- 信号灯信息获取 :针对当前路口,精准提取并返回关键信息,包括:
- 车辆所在车道的ID及属性;
- 路口ID及类型(确认是否为信号灯控制路口);
- 信号灯当前相位(如红灯、绿灯、黄灯)及剩余时长;
- 动态路径推荐:在车辆到达信号灯路口时,基于当前路网状态重新计算并展示前3条备选路径,包含路径由哪些路段组成及各路径的总通行时间,支持车辆根据实时情况调整行驶路线。
系统核心特点
- 实时性:车辆每到一个信号灯路口即触发信息采集与路径重算,响应路网动态变化;
- 交互性:通过SUMO GUI实时可视化车辆行驶、路径推荐及信号灯状态,直观呈现系统运行过程;
- 扩展性:路网图模型与路径规划算法解耦,便于后续集成更高效的路径算法(如A*、Yen's算法)或引入实时交通流数据优化权重计算。
该系统为智能车辆的动态路径决策与交通信息感知提供了可验证的仿真平台,可用于研究城市道路中车辆与信号灯协同、路径优化策略等场景。
基于SUMO实现备选路径推荐以及实时动态道路信息获取,这个小车每到一个路口、就返回这个路口的信号灯状态、并输出基于当前所在路段-重点路段的前三个最短备选路径 小车每到达一个路口,返回与当前路口连接路段的拥堵情况,控制小车进行动态规划,每到达一个路口用算法进行一次路径规划,直到到达终点,其实就是备选路径推荐,就是给定两个node_id,返回最短的3条路径,我要在小车运行时,每走一步,到达路口时,返回当前路口的红绿灯信息,以及备选路径 我反正要的是两点之间备选路径